

9.2. Способы преобразования угла в код, основанные на интегрировании выходных напряжении сквт
Известно, что наибольшей помехоустойчивостью обладают интегрирующие преобразователи. Наглядным примером этому служат следящие ЦПУ, содержащие два последовательно включенных интегратора в контуре сигнала рассогласования. В ЦПУ находят применение и способы преобразования, в которых подвергаются интегрированию непосредственно выходные сигналы СКВТ. Процесс преобразования в этом случае носит циклический характер, и после завершения цикла на выходе ЦПУ формируется цифровой эквивалент входного угла.
Согласно одному из этих способов [а. с. 409262 (СССР)] входные напряжения СКВТ, пропорциональные синусу и косинусу угла, сравнивают по абсолютной величине, меньшее напряжение интегрируют в течение эталонного времени, затем интегрируют большее напряжение с противоположным знаком до-получения заданного напряжения, определяют временной интервал интегрирования большего напряжения и преобразуют его в код.
На рис. 9.2 приведена функциональная схема устройства, реализующего такой способ.
Напряжения с выхода СКСДУ, пропорциональные синусу и косинусу угла поворота, выпрямляют с помощью выпрямителей В1 и В2. Их выходы через ключи Кл1 и Кл2 подключены на вход интегратора ИР, к выходу которого подключен компаратор К. Напряжения с выпрямителей поступают также на схему сравнения СС. К управляющим входам ключей подключены выходы блока управления БУ. Схема работает следующим образом.
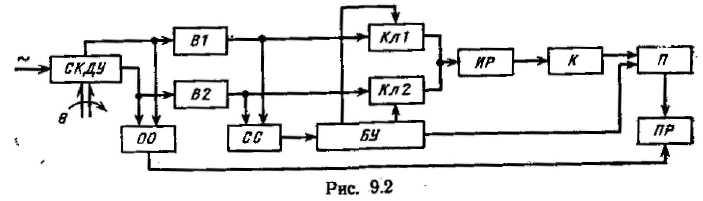
Блок управления открывает ключ, подключающий меньшее по значению напряжение с выпрямителей на вход ИР на эталонное время. Сравнение напряжений производится СС, которая выдает сигнал в БУ. Затем БУ открывает другой ключ и выдает старт-импульс на преобразователь Я временного интервала в код, причем выпрямители включены так, что знаки их выходных напряжений противоположны. Компаратор К выдает стоп-импульс на Я при достижении напряжения определенное значения на выходе ИР. Полученное в результате преобразования значение кода поступает в промежуточный регистр ЯР, в котором происходит вычисление угла в пределах октанта. Три старших разряда кода определяются определителем октантов 00.
Недостатком такого способа является значительная погрешность преобразования напряжений с синусной и косинусной обмоток датчика, осуществляемого перед первым циклом интегрирования в постоянные напряжения. Эта погрешность определяется разбросом характеристик выпрямителей В1 и В3 из-за их неидентичности.
С целью повышения точности предложен иной способ [а. с. 732951 (СССР)], предусматривающий сравнение синусного и косинусного напряжений СКДУ, большее из которых выпрямляют с помощью выпрямителя В. Далее интегрируют интегратором ИР опорное напряжение, поступающее с источника опорного напряжения ИОН, обратное по знаку выпрямленному большему напряжению, в течение эталонного интервала времени. Затем интегрируют ИР большее на-пряжение до заданного значения, определяют и запоминают интервал времени его интегрирования, выпрямляют с помощью В меньшее напряжение и интегря-руют его за интервал времени интегрирования большего напряжения. После этого интегрируют опорное напряжение с ИОН, обратное по знаку меньшему выпрямленному напряжению, до заданного значения и определяют временной интервал его интегрирования, по величине которого определяют код угла поворота вала СКДУ.
На рис. 9.3 изображена функциональная схема устройства, реализующего этот способ, а на рис. 9.4 — диаграмма работы устройства.
Преобразователь работает в двух режимах: в режиме преобразования кода во временной интервал н в режиме преобразования временного интервала в код. Преобразование происходит за четыре такта. Измеренное в результате преобразования значение кода поступает в ПP, в котором происходит вычисление угла в пределах октанта. Номер октанта определяется определителем октантов 00.
Использование этого способа дает возможность повысить точность преобразования угла поворота вала в код. Недостатком способа является низкое быстродействие.
С целью устранения этого недостатка предложен третий способ {а. с. 1101866 (СССР)]. Он заключается в том, что выпрямление меньшего напряжения осуществляют непосредственно после получения результата выпрямления большего напряжения (результат предварительно запоминают), а интегрирование выпрямленного меньшего напряжения осуществляют непосредственно после интегрирования выпрямленного и запомненного большего напряжений.
Отличие реализации этого способа от двух предыдущих состоит во введении блока памяти н в структуре построения преобразователя.
Блок
00
определяет
октант угла поворота в и выдает полученный
результат в цифровой форме на
вычислительный блок, в котором происходит
вычнс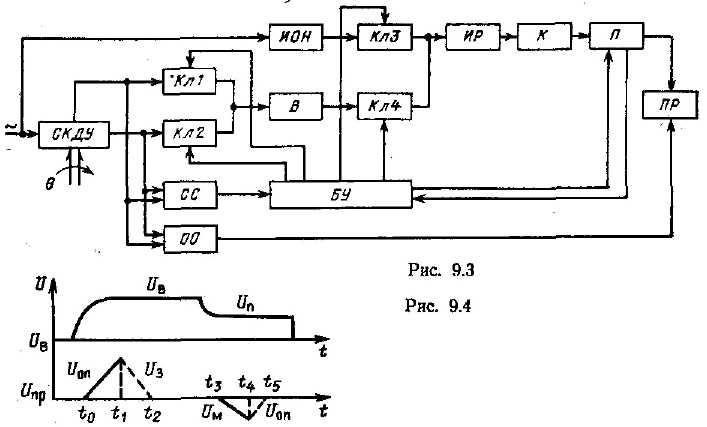 ление
0 в пределах октанта. Этот способ
позволяет повысить быстродействие
преобразования.
ление
0 в пределах октанта. Этот способ
позволяет повысить быстродействие
преобразования.
Основой одного из широко
распространенных
методов преобразования выходных
сигналов СКВТ в код является использование
гармонического генератора [3, 81],
начальные условия которого пропорциональны
амплитуде выходных сигналов СКВТ
![]() Время,
необходимое для получения информации
об угле поворота 0, пропорционально
этому углу.
Время,
необходимое для получения информации
об угле поворота 0, пропорционально
этому углу.
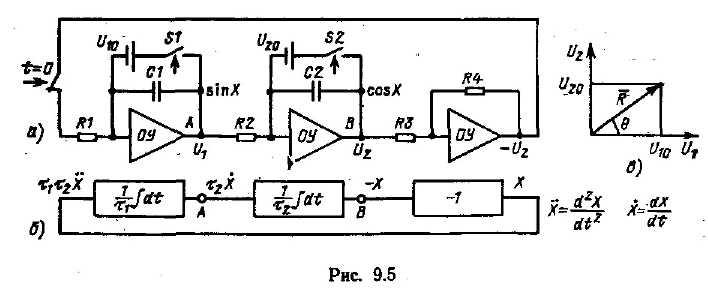
Как
видно из рис. 9.5,а, б,
гармонический
генератор представляет собой аналоговое
звено второго порядка, содержащее два
интегратора и инвертор. Выход
инвертора является также и входом
первого интегратора. Принимая во
внимание отрицательные знаки при
коэффициентах передачи инвертора и
интегратора
н учитывая также, что постоянные времени
двух интеграторов равны
![]() можем
записать уравнения
можем
записать уравнения
![]()
где![]() Это
уравнения простого гармонического
колебания
Это
уравнения простого гармонического
колебания
с
круговой частотой
![]() определяемой
как
определяемой
как![]()
![]() Выходные
гармонические сигналы двух интеграторов
представляют собой
Выходные
гармонические сигналы двух интеграторов
представляют собой

![]() —
напряжения на интегрирующих конденсаторах
при
—
напряжения на интегрирующих конденсаторах
при
![]() (начальные
условия). Выходная амплитуда Е
осциллятора может
управляться зарядами С1
и С2
до определенного
значения перед моментом
(начальные
условия). Выходная амплитуда Е
осциллятора может
управляться зарядами С1
и С2
до определенного
значения перед моментом
![]() Важно, что ампли-
Важно, что ампли-
туда не зависит от постоянных времени. В противоположность этому частота на выходе зависят от постоянных времени интеграторов и не зависит от начальных условий.
Выходные
сигналы двух интеграторов X
и Y
составляют
воображаемый вектор
![]() который
поворачивается с постоянной скоростью
(рис.
который
поворачивается с постоянной скоростью
(рис.
![]() 9.5,в).
9.5,в).
Время![]() требуемое
для поворота этого вектора от
первоначального положениядо
положения, в котором напряжение
требуемое
для поворота этого вектора от
первоначального положениядо
положения, в котором напряжение![]() равно
кулю, прямо пропорциональноуглу
вектора. Так как угол равен
равно
кулю, прямо пропорциональноуглу
вектора. Так как угол равен![]() то
выражение для времени будет
то
выражение для времени будет
![]()
в течение
 устанавливаются
начальные условия за счет интегрирования
и
выпрямления выходных сигналов СКВТ
устанавливаются
начальные условия за счет интегрирования
и
выпрямления выходных сигналов СКВТ
в течение
 вектор
вектор представленный
своими компонентами
представленный
своими компонентами поворачивается
до тех пор, пока выходной сигнал второго
интегратора не пе
рейдет через
нуль;
поворачивается
до тех пор, пока выходной сигнал второго
интегратора не пе
рейдет через
нуль;в течение
 оба
интегратора сбрасываются до нуля за
счет замыкания
ключей S1 и S2 (см.
рис. 9.5), параллельных интегрирующим
конденсаторам.
оба
интегратора сбрасываются до нуля за
счет замыкания
ключей S1 и S2 (см.
рис. 9.5), параллельных интегрирующим
конденсаторам.
Начальные
условия
![]() получаются соединением
получаются соединением![]() ключами 5/ и S2 в течение периода
ключами 5/ и S2 в течение периода![]() поэтому
поэтому
В
течение периода
ляемые уравнениями (9.6). и
![]() обратная связь осциллятора замыкается.
Оба интегратора интегрируют выходные
сигналы друг друга опреде-
обратная связь осциллятора замыкается.
Оба интегратора интегрируют выходные
сигналы друг друга опреде-
![]()
(9.7),
начиная с начальных условий,
установленных в течение![]()

![]() представляют функции
синуса и косинуса, урав-
представляют функции
синуса и косинуса, урав-
нение
(9.13) может быть решено для![]() положить
равным нулю:
положить
равным нулю:
![]()
![]()
![]()
![]() то
то
Аналогично
если в уравнении (9.12)![]() ,
то
,
то
![]()
![]() т. е.
т. е.
![]()
![]() то
то
![]()
Поделив (9.15) на (9.17), получим
![]()
![]() не
зависит от эталонного напряжения.
Однако в отличие от другихсхема,
показанная на рис. 9.5,а, не имеет эталонного
источника. Сигнал
не
зависит от эталонного напряжения.
Однако в отличие от другихсхема,
показанная на рис. 9.5,а, не имеет эталонного
источника. Сигнал![]() не зависит также от
длительности периода
не зависит также от
длительности периода![]() но это приводит к
не-
но это приводит к
не-
удобству,
так как цифровой выходной сигнал![]() зависит
от тактовой частоты
зависит
от тактовой частоты
![]() ,
которая должна быть стабильной для
высокой точности преобразователя.
,
которая должна быть стабильной для
высокой точности преобразователя.
Большое
внимание в схеме уделяется стабильности
постоянных времени интегрирования
![]() и
и
![]() так
как
так
как
![]() изменяется
в зависимости от
изменяется
в зависимости от![]() Это
значит, что резисторы и конденсаторы,
используемые в интеграторах, должны
быть точными и стабильными. Зависимость
постоянной времени интегрирования
обусловливает ограничение точности
преобразователя, что является существенным
недостатком этого варианта ЦПУ несмотря
на его простоту и малое
число элементов в отсчетной части.
Это
значит, что резисторы и конденсаторы,
используемые в интеграторах, должны
быть точными и стабильными. Зависимость
постоянной времени интегрирования
обусловливает ограничение точности
преобразователя, что является существенным
недостатком этого варианта ЦПУ несмотря
на его простоту и малое
число элементов в отсчетной части.
После заполнения тактовой частотой временного интервала получают код
![]()
Недостатки
этого способа видны из анализа (9.19):
во-первых, результирующий
код зависит как от тактовой частоты![]() так
н от частоты гармонических
колебаний
так
н от частоты гармонических
колебаний![]() зависящей
в свою очередь от постоянных времени
интеграторов,
и, следовательно, от изменения температуры
окружающей среды, что-создает
существенную погрешность преобразования;
во-вторых, для получения кода
Ф,
соответствующего
углу 0, круговая частота
зависящей
в свою очередь от постоянных времени
интеграторов,
и, следовательно, от изменения температуры
окружающей среды, что-создает
существенную погрешность преобразования;
во-вторых, для получения кода
Ф,
соответствующего
углу 0, круговая частота![]() должна
иметь точное-определенное
значение
должна
иметь точное-определенное
значение
![]()
где![]() —величина
кода, соответствующего
—величина
кода, соответствующего![]() определяемая
количествомим-пульсов
счета.
определяемая
количествомим-пульсов
счета.
К тому же в нормальных условиях необходимо задать постоянные времени интеграторов таким образом, чтобы одновременно выполнялись два равенства:
![]()
где![]() —
расчетное значение круговой частоты
преобразователя, выбираемое-
—
расчетное значение круговой частоты
преобразователя, выбираемое-
исходя
из требуемого уровня чувствительности
и значения![]()
Такая настройка преобразователя трудоемка. Кроме того, существует погрешность, вызванная несоответствием реального периода гармонических колебаний и расчетного, получаемая уже в нормальных условиях при настройке преобразователя.