

8.4. Совмещенный цифровой преобразователь угла, скорости и ускорения
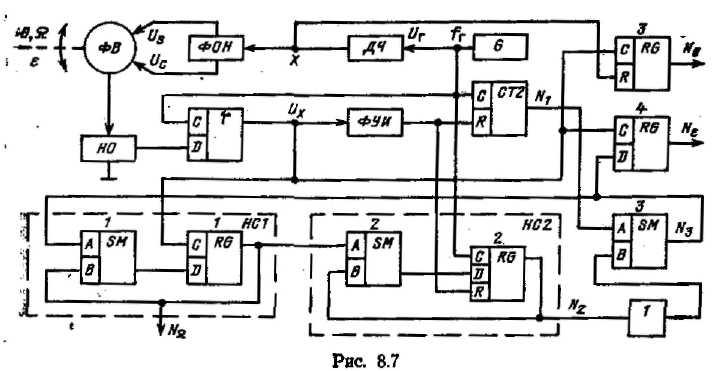
На рис. 8.7 представлена функциональная схема преобразователя, в котором устранены отмеченные выше недостатки.
Питание
ФВ
производится
через формирователь опорных напряжений
ФОН
и
делитель частоты ДЧ
от
генератора импульсов G.
Формирователь
преобра-зует
выходной линейный код X
на
выходе ДЧ
с
помощью ПЗУ,
не
показанного на рисунке, в коды
![]() которые
преобразуются ЦАП - в их: аналоговые
эквиваленты. Такое построение ЦПП
позволяет при необходимости; получить
коды проекций в, т. е. сделать его
функциональным [49].
которые
преобразуются ЦАП - в их: аналоговые
эквиваленты. Такое построение ЦПП
позволяет при необходимости; получить
коды проекций в, т. е. сделать его
функциональным [49].
Цифровой
эквивалент
![]() угла
поворота 0 формируется из сдвига фазы
между
опорным напряжением ФВ
и
его выходным сигналом
угла
поворота 0 формируется из сдвига фазы
между
опорным напряжением ФВ
и
его выходным сигналом![]()
![]() —
частота опорного напряжения. Процесс
формирования
—
частота опорного напряжения. Процесс
формирования
![]() не
отличается
от классического [3]. В канале преобразователя
угла задействованы нуль-орган
НО,
преобразующий
не
отличается
от классического [3]. В канале преобразователя
угла задействованы нуль-орган
НО,
преобразующий
![]() в
прямоугольные импульсы; Т-триггер,
тактируемый
фронтом импульса G
в стробирующий выходной сигнал НО,
с
тем чтобы момент записи кодов в выходные
регистры не попал на переходные процессы
в ДЧ,
SM1
и
SM3.
в
прямоугольные импульсы; Т-триггер,
тактируемый
фронтом импульса G
в стробирующий выходной сигнал НО,
с
тем чтобы момент записи кодов в выходные
регистры не попал на переходные процессы
в ДЧ,
SM1
и
SM3.
Сигнал на выходе триггера
![]()
а в
![]() записывается
значение линейно нарастающего кода
записывается
значение линейно нарастающего кода
![]()
-соответствующее
фронту сигнала![]() В
соответствии с (8.17) и (8.18) можно
В
соответствии с (8.17) и (8.18) можно
записать,
что
![]() т.
е. выходной код
т.
е. выходной код
![]() представляет
цифровой
представляет
цифровой
эквивалент угла 0.
Наибольший
интерес представляет построение каналов
преобразования скорости
и ускорения, сопряжение которых с ЦПУ
производится через формирователь
узких импульсов ФУИ
и
двоичный суммирующий счетчик СТ2,
который
должен
иметь вход установки в нулевое состояние.
Формирование цифрового эквивалента
скорости в отличие от рассмотренных
выше методов производится без
методической ошибки. Это достигается
тем, что код отклонения периода выходного
сигнала ФВ
не
принимается в качестве эквивалента
угловой скорости
![]() а
подвергается преобразованию замкнутой
цифровой системой. Она со-держит
в контуре последовательное соединение
накапливающих сумматоров НС1,
НС2, блока
инверторов н SM3.
Сумматоры
НС1
и
НС2
в
свою очередь построены
на замкнутых в кольцо полных двоичных
сумматорах SMI,
SM2
и
регистрах
а
подвергается преобразованию замкнутой
цифровой системой. Она со-держит
в контуре последовательное соединение
накапливающих сумматоров НС1,
НС2, блока
инверторов н SM3.
Сумматоры
НС1
и
НС2
в
свою очередь построены
на замкнутых в кольцо полных двоичных
сумматорах SMI,
SM2
и
регистрах
![]() запись
информация в которые производится по
фронту импульса,
поступающего на их тактовые входы.
запись
информация в которые производится по
фронту импульса,
поступающего на их тактовые входы.
Сумматор
НС1
выполняет
роль цифрового интегратора, формирующего
на своем выходе некоторый код
![]() Работа
НС1
описывается
разностным уравнением
где
Работа
НС1
описывается
разностным уравнением
где
![]() —выходной
код
—выходной
код![]() HCI
перед
приходом (n+l)-го
импульса на тактовый
вход
HCI
перед
приходом (n+l)-го
импульса на тактовый
вход
![]() —выходной
код ИС1
после
прихода (n-l)-го
импульса;
—выходной
код ИС1
после
прихода (n-l)-го
импульса;
![]() —
входной код НС1
в
момент прихода фронта (n+l)-ro
импульса.
—
входной код НС1
в
момент прихода фронта (n+l)-ro
импульса.
Сумматор
ИС2
аналогично
НС1
построен
на SM2
и
![]() но
отличается тем,
что
но
отличается тем,
что![]() имеет
входустановки
имеет
входустановки![]() его
в нулевое состояние импульсов ФУИ.
При
неподвижном роторе ФВ
его
в нулевое состояние импульсов ФУИ.
При
неподвижном роторе ФВ
![]() =0,
т. е.
=0,
т. е.
![]()
где![]() —емкостьДЧ
и
СТ2.
При
вращении ротора ФВ со скоростью
—емкостьДЧ
и
СТ2.
При
вращении ротора ФВ со скоростью
![]() период
период![]()
Счетчик
СТ2
фронтом
![]() устанавливается
в нулевое состояние, и к приходу
следующего фронта на выходе СТ2
формируется
дополнительный код, пропорциональный
разности периодов:
устанавливается
в нулевое состояние, и к приходу
следующего фронта на выходе СТ2
формируется
дополнительный код, пропорциональный
разности периодов:
![]()
Одновременно
в НС2
производится
суммирование кода
![]() на
каждый импульс
на
каждый импульс![]() ,
и к этому же моменту
,
и к этому же моменту
![]()
Вычитанием
этих кодов образуется![]() который
в момент прихода фронт» сигнала
который
в момент прихода фронт» сигнала
![]() корректирует
содержание ИС1\
корректирует
содержание ИС1\
![]() таким образом,
чтобы рассогласование
таким образом,
чтобы рассогласование![]() компенсировалось.
При этом
компенсировалось.
При этом
![]() т.
е.
т.
е.![]()
![]()
Рассогласование
![]() формируемое
в момент прихода фронта сигнала
формируемое
в момент прихода фронта сигнала![]() на
выходе SM3,
записывается
в
на
выходе SM3,
записывается
в![]() Поскольку
является
Поскольку
является
![]() входным
кодом цифрового интегратора ИС1,
выходной
код
входным
кодом цифрового интегратора ИС1,
выходной
код
![]() которого
пропорционален
скорости
которого
пропорционален
скорости![]() то
то![]() Покажем
это для установившегося режима,когда
Покажем
это для установившегося режима,когда![]() Можно
записать разностное уравнение
Можно
записать разностное уравнение
![]()
где
![]() —
значение скорости в периоде;
—
значение скорости в периоде;
![]() —
значение
—
значение
![]() периода
периода![]()
сигнала
![]() в
в
![]() периоде;
периоде;
![]() —
значение скорости в
—
значение скорости в
![]() пе-
пе-
риоде.
Из (8.22) и (8.23) можно записать
Поскольку
рассматриваем установившийся режим,
для системы с астатизмом первого
порядка рассогласование![]()
Тогда можно записать
![]()
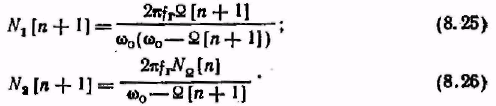
Из (8,24)—(8.27) находим
![]()
![]()
![]() (8.28) можно представить
в виде
(8.28) можно представить
в виде
![]()
![]()
а с учетом (8.20) или
т. е.
код
![]() на
выходе
на
выходе
![]() в
первом приближении пропорционален
ускорению
в
первом приближении пропорционален
ускорению![]() Чем
выше
Чем
выше![]() тем
строже выполняется (8.30). Работа ЦПП
поясняется
временными диаграммами на рис 8.3.
тем
строже выполняется (8.30). Работа ЦПП
поясняется
временными диаграммами на рис 8.3.
Преобразователь позволяет получить цифровые эквиваленты угла, скорости и ускорения из фазы выходного сигнала ФВ чисто цифровым методом, что дает возможность повысить его точность. Преобразование не имеет методической ошибки измерения скорости. В качестве первичного датчика рекомендуется использование СКВТ типа СКТД6465, ДСПУ 128, ВТ-100 и ВТ-70.
Не
представляет сложности дальнейшее
расширение функциональных возможностей
такого МЦПП в части совмещенного
формирования цифровых эквивалентов![]() т.
е. создание полифункционального ЦПП
(ПЦПП). Это достигается
выполнением ФОН на основе ПЗУ с
синусно-косинусной прошивкой,
например БИС К505РЕЗ, которые обеспечивают
формирование из линей-ного
кода ДЧ кодов
т.
е. создание полифункционального ЦПП
(ПЦПП). Это достигается
выполнением ФОН на основе ПЗУ с
синусно-косинусной прошивкой,
например БИС К505РЕЗ, которые обеспечивают
формирование из линей-ного
кода ДЧ кодов![]() дальнейшее
преобразование которых в ква-зигармонические
напряжения
дальнейшее
преобразование которых в ква-зигармонические
напряжения
![]() осуществляется
ЦАП, например БИСЛС572ПА2.
Осуществление съема информации по
методу «бегущей стробирующей метки
позволяет с незначительными аппаратными
затратами получить коды
осуществляется
ЦАП, например БИСЛС572ПА2.
Осуществление съема информации по
методу «бегущей стробирующей метки
позволяет с незначительными аппаратными
затратами получить коды
![]() [49].
[49].
Цифровая часть ПЦПП реализуется на ИМС: ДЧ и СТ2—К133ИЕ5;

Т—К133ТМ2;
SMI—SM3—К133ИМЗ;
![]() и
и
![]() —
К133ИР1, а
—
К133ИР1, а
![]() —
К133ИР13; блок инверторов— К133ЛН1.
—
К133ИР13; блок инверторов— К133ЛН1.
Существенным достоинством этого варианта ЦПП является получение сигналов на всех уровнях информационного обеспечения непосредственно в цифровой форме. Основным недостатком такого построения следует считать ограниченное быстродействие, связанное с использованием фазы в качестве промежуточного параметра в преобразователе УПК [3].