

13.2. Следящий цпу как замкнутая система автоматического регулирования
По сравнению с описанными циклическими ЦПУ на основе функциональные генераторов (см. гл. 11) в следящих ЦПУ выявители рассогласования более
сложны.
В то же время операция определения
демодулИрованного сигнала рассогласования,
пропорционального
![]() почти
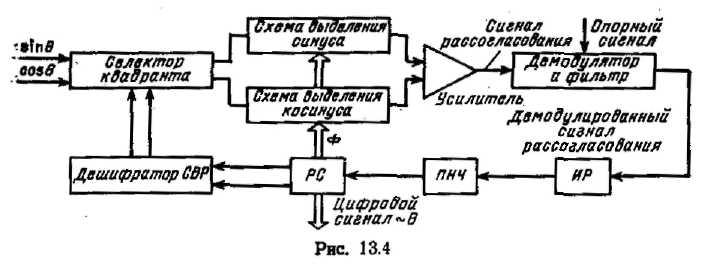
аналогична. Как показано «а
рис. 13.4, сигнал рассогласования поступает
на интегратор ИР.
Напряжение
на
его выходе представляет собой интеграл
по времени от этого сигнала. Выходной
сигнал ИР
управляет
ПИЧ
[3].
Последний формирует последовательность
импульсов, частота которых пропорциональна
напряжению на выходе ИР.
почти
аналогична. Как показано «а
рис. 13.4, сигнал рассогласования поступает
на интегратор ИР.
Напряжение
на
его выходе представляет собой интеграл
по времени от этого сигнала. Выходной
сигнал ИР
управляет
ПИЧ
[3].
Последний формирует последовательность
импульсов, частота которых пропорциональна
напряжению на выходе ИР.
Сигнал рассогласования используется для управления реверсивным счетчИ-ком PC, накапливающим выходные ИМпульсы ПИЧ, которые в зависимости от знака сигнала рассогласования поступают на входы прямого и обратного Счета этого PC.
Таким образом, отсчетное устройство следящего ЦПУ в целом может быть представлено в виде системы регулирования с обратной связью, содержащей два интегратора в прямой цепи. Если использовать терминологию теории автоматического регулирования, такие системы классифицируются как следящие системы с астатиЗМом второго порядка (рис. 13.5). Этот момент важно отметать прежде Всего в связи с особенностями подобных следящих систем.
Функциональная схема системы представлена на рис. 13.6.

Создаваемый
функциональными генераторами сигнал
рассогласования используется
для изменения содержимого счетчика
PC.
Сигнал
рассогласования постоянного тока
образуется после демодуляции и
сглаживания. Его полярность положительна,
если 6 больше Ф,
и
отрицательна, если в меньше Ф. Выходной
сигнал
демодулятора ДМ
подается
на счетчик PC
и
определяет направление счета
— на суммирование (0>Ф) либо на вычитание
(0<Ф). Сигнал рассогласования
постоянного тока подается на интегратор,
формирующий напряжение, пропорциональное
интегралу по времени от
![]() Оно
поступает наПНЧ,
частота-импульсов
иа выходе которого прямо пропорциональна
Оно
поступает наПНЧ,
частота-импульсов
иа выходе которого прямо пропорциональна
![]() В счетчике эти;
импульсы
суммируются или вычитаются до тех пор,
пока сигнал рассогласования
не снизится до нуля, когда 0=Ф. При
постоянном рассогласовании частота
импульсов
растет, поскольку интеграл от сигнала
рассогласования по времени
В счетчике эти;
импульсы
суммируются или вычитаются до тех пор,
пока сигнал рассогласования
не снизится до нуля, когда 0=Ф. При
постоянном рассогласовании частота
импульсов
растет, поскольку интеграл от сигнала
рассогласования по времени ![]() возрастает.
возрастает.
Рассмотрим
случай вращения ротора, СКВТ с постоянной
угловой скоростью. При
любом рассогласовании (0—Ф) в системе
значение![]() растет
со временем. Это
происходит до тех пор, пока частота
импульсов не станет достаточной для:
поддержания
изменений Ф практически равными
изменениям 6. При этом скорость
кодирования вращения сохраняется
постоянной. Таким образом, цифровой
эквивалент
Ф на выходе будет повторять входной
сигнал 0. При этом скорость изменения
0 не должна превышать эквивалентной
максимально возможной для ПНЧ частоты
следования импульсов.
растет
со временем. Это
происходит до тех пор, пока частота
импульсов не станет достаточной для:
поддержания
изменений Ф практически равными
изменениям 6. При этом скорость
кодирования вращения сохраняется
постоянной. Таким образом, цифровой
эквивалент
Ф на выходе будет повторять входной
сигнал 0. При этом скорость изменения
0 не должна превышать эквивалентной
максимально возможной для ПНЧ частоты
следования импульсов.
Погрешности возрастают в периоды ускорений и замедлений — при пусках,, остановках и изменениях скорости. Минимальное время, за которое система может начать вырабатывать точный выходной сигнал при максимальной позиционной погрешности 180°, также определяется частотой на выходе ПНЧ.
Введение фазочувствительного демодулятора позволяет уменьшить влияние квадратурных составляющих выходного сигнала сельсина или СКВТ. Эти составляющие заметно возрастают при вращении ротора, поскольку в этом случае электромашинный преобразователь функционирует как генератор. Тогда уровень-квадратурных составляющих при больших скоростях вращения может оказаться опасно высоким по сравнению с напряжениями полезных сигналов. Следовательно, в точных высокоскоростных системах влияние квадратурных сигналов нужно снижать. Этого можно достичь тщательной отработкой схемы демодулятора.
Влияние отдельных составляющих на показатель ЦПУ рассмотрим на примере преобразователя [64], параметры которого соответствуют современным требованиям к устройствам этого класса [39].
Система автоматического регулирования (САР) — наиболее важная часть-преобразователя. Применение в ней высококачественного функционального пре-образователя на основе управляющего трансформатора дало возможность по-лучнть более плавную и точную выходную реакцию. Как видно из рис 13.7,-система регулирования преобразователя [64] подобна применяемым в других следящих преобразователях. Выходом системы является цифровой эквивалент угла Ф, содержащийся в реверсивном счетчике. Информация об угле 8 сель-сина или СКВТ заключена в двух составляющих: sin 0 cos wt и cos 0 cos wt.
В узле суммирования основного контура регулирования находится управляющий трансформатор, сигнал с выхода которого может быть выражен как sin (0—Ф)cos wt. Сигнал рассогласования sin(0—Ф), модулированный опорной (есущей cos wt, характеризует разность между цифровым эквивалентом угла Ф

в
счетчике
и измеряемым углом 8. В точке В
схемы
несущая
![]() удалена
демодулятором.
удалена
демодулятором.
Главный контур регулирования содержит два последовательно включенных каскада интегрирования: аналоговый интегратор и следующий за ним цифровой. Преобразователь напряжение—частота генерирует импульсы, частота которых пропорциональна напряжению в точке А, и каждый импульс изменяет содержимое счетчика на единицу младшего (по весу) разряда МБР. Поскольку цифровой угол равен произведению частоты на время, он является интегралом напряжения в точке А. Из-за наличия в контуре двух интеграторов СДР является системой с астатизмом второго порядка.
Характеристики
такой системы, касающиеся точности
регулирования, могут быть
получены в результате анализа основного
уравнения системы. Уравнение
может быть выведено при рассмотрении
поведения напряжения в точке В
(рис.
13.7). Выходное напряжение демодулятора
в точке В![]()
![]() —
коэффициент пропорциональности. Это
уравнение описывает динамическое
поведение системы. Так, если выходная
реакция постоянна, то Ф=
—
коэффициент пропорциональности. Это
уравнение описывает динамическое
поведение системы. Так, если выходная
реакция постоянна, то Ф=
![]() Выходной
угол поэтому равен входному. Если
постоянна скорость
изменения выходного угла
Выходной
угол поэтому равен входному. Если
постоянна скорость
изменения выходного угла
![]() Это
означает,
что угол отслеживается без отставания.
В установившемся состоянии скорость
изменения угла на входе равна скорости
на выходе, если не превышена максимальная
рабочая частота ПИЧ.
Это
означает,
что угол отслеживается без отставания.
В установившемся состоянии скорость
изменения угла на входе равна скорости
на выходе, если не превышена максимальная
рабочая частота ПИЧ.
Если
постоянно ускорение изменения на входе,
то![]()
Дифференцирование
показывает, что
![]() Таким
образом, скорость и
ускорение изменений на выходе равны
скорости и ускорению на входе. Кроме
того, наблюдается конечное отставание
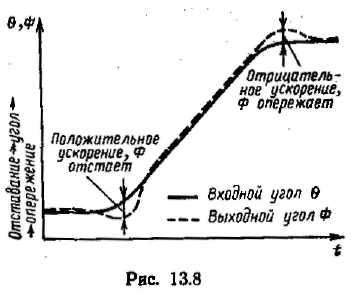
8 относительно Ф. При не-больших
ускорениях, когда
Таким
образом, скорость и
ускорение изменений на выходе равны
скорости и ускорению на входе. Кроме
того, наблюдается конечное отставание
8 относительно Ф. При не-больших
ускорениях, когда
![]() отставание
равно
отставание
равно![]()
Переходная характеристика системы регулирования показана на рис. 13.8. За исключением отставания или опережения в интервалы времени с ускорением выходная реакция всегда равна входному воздействию. САР должна быть устойчивой и обеспечивать оптимальный переходный процесс на выходе при эа-данных входных воздействиях.
Для
количественной оценки того, насколько
быстро ЦПУ может отслеживать угловую
скорость, вводится понятие динамической
точности [57]. В следящем
преобразователе она определяется
константой скорости
![]() показыва-
показыва-
ющей,
насколько выход преобразователя
должен запаздывать относительно
его входа для того, чтобы генерируемое
напряжение рассогласования было
достаточно больший и могло
восприниматься суммирующим усилителем.
Константа скорости определяется
отношением![]() где
где
![]() —угол
запаздывания в в —угловая
скорость вала. В связи с тем, что
в современных следящих ЦПУ можно
получить
—угол
запаздывания в в —угловая
скорость вала. В связи с тем, что
в современных следящих ЦПУ можно
получить
![]() достигающие
достигающие
![]() даже
для высоких 6
даже
для высоких 6
![]() точность преобразователя
в основном зависит от точности ФЦАП
и переходных характеристик системы.
точность преобразователя
в основном зависит от точности ФЦАП
и переходных характеристик системы.
Большинство
современных одноотсчетных следящих
преобразователей имеют
погрешность на уровне 12-го разряда, т.
е.![]() Половина
этого значения приходится
обычно на управляющий трансформатор
или другой ФЦАП. Незначительное
влияние на точность оказывает смещение
второго интегратора. Квадратурные
составляющие сигнала первичного датчика
необходимо тщательно фильтровать.
При малых квадратурных напряжениях
можно не предусматривать
в демодуляторе компенсации опережения
по фазе, составляющего обычно 5° в
выходных сигналах первичного датчика.
Переходный процесс ЦПУ должен быть
свободен от автоколебаний.
Половина
этого значения приходится
обычно на управляющий трансформатор
или другой ФЦАП. Незначительное
влияние на точность оказывает смещение
второго интегратора. Квадратурные
составляющие сигнала первичного датчика
необходимо тщательно фильтровать.
При малых квадратурных напряжениях
можно не предусматривать
в демодуляторе компенсации опережения
по фазе, составляющего обычно 5° в
выходных сигналах первичного датчика.
Переходный процесс ЦПУ должен быть
свободен от автоколебаний.
Устойчивость
сохраняется, если дифференциальная
нелинейность и уровень шума
после фильтрации достаточно малы по
сравнению с гистерезисом (зоной
нечувствительности)
в контуре обратной связи формирования
сигнала рассогласования.
Чтобы гистерезис не оказывал существенного
влияния на устойчивость и точность
САР, его величина должна быть меньше
половины суммарной погрешности.
Гистерезис выявителя рассогласования.
ЦПУ [64] составляет
![]() т.е,
т.е,
![]() МБР,
а его дифференциальная нелинейность
МБР,
а его дифференциальная нелинейность
![]() МВР.
МВР.
При
сопряжении отсчетной части с первичным
преобразователем через трансформатор
Скотта появляется дополнительная
погрешность![]() [86].
[86].