

12.2. Преобразователи с тангенсным пзу
Усложнение ФЦАП, связанное с введением дополнительных логических-устройств для компенсации инструментальной погрешности нарушения строгой монотонности смены хода в квадрантных точках, приводит к необходимости исследования иных путей построения отсчетной части ЦПУ. В отличие от положения об обязательном перекодировании выходного кода в синусно-косинус-ные функции в пределах квадранта [3] более перспективным, на наш взгляд, является переход к тангенсному преобразованию1 в пределах октанта [52]. По-мимо упрощения за счет уменьшения объема памяти это позволяет повысить-разрешающую способность ЦПУ в 2 раза.
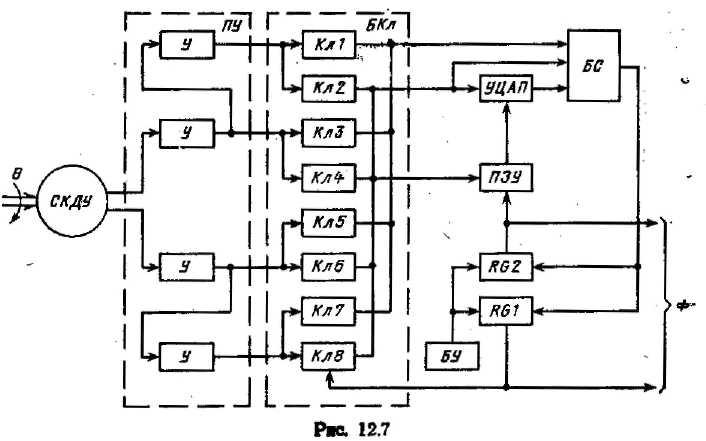
ЦПУ можно выполнить по схеме рис 12.7, предусматривающее использование ПЗУ с тангенсной прошивкой. В ней получение кода октантов производится-последовательно с получением кода внутри октанта, а схема определения октантов реализуется посредством парафазных усилителей ПУ, блоков ключей БКл и сравнения БС [а. с. 1034059 (СССР)].
Блок
управления БУ
формирует
серию тактовых импульсов, которые
обес-печивают
последовательное включение ключей
Кл1—Кл8
и
поразрядное переключение регистров![]()
В первых трех тактах преобразования определяют октант, в котором расположен кодируемый угол. В первом такте включается ключ Кл3, который подключает синусное напряжение датчика в прямой фазе к блоку сравнения БС. Если при сравнении синусное напряжение имеет прямую фазу, то в старшем»
разряде
регистра
![]() формируется
нулевое значение, если обратную, то
еди-
формируется
нулевое значение, если обратную, то
еди-
ничное.
Во
втором такте включают ключ Кл7, который
подключает косинусное на-пряжение
датчика в прямой фазе к БС,
и
определяют следующий разряд, кото-рый
записывается в регистр![]()
В третьем
такте включают такую пару ключей,
которая обеспечивает под-ключение
к входам БС модулей
синусного и косинусного напряжений.
Необходи-мoe
сочетание ключей определяется анализом
значений двух старших разрядов в
регистре
![]() Результат
сравнения записывается в третий разряд
этого реги-
Результат
сравнения записывается в третий разряд
этого реги-
стра. Таким образом, значение трех старших разрядов составляют код октанта преобразуемого угла.
Последующее
преобразование, начиная с четвертого
такта, выполняется пу-ттем поразрядного
уравновешивания при последовательном
переключении разрядов
в регистре![]() начиная
со старшего разряда, в соответствии с
эависимо-стью
начиная
со старшего разряда, в соответствии с
эависимо-стью
![]() где
0—преобразуемый угол поворота вала, а
Ф
—
выходной
код
где
0—преобразуемый угол поворота вала, а
Ф
—
выходной
код![]()
Эта
зависимость реализуется на участке,
соответствующем первому октан-ту.
Код![]() формируется
функциональным преобразователем из
выходного кодаФ
регистра RG2.
Функциональный
преобразователь выполнен на основе
тангенс-ного
ПЗУ.
Блок
УЦАП
осуществляет
операцию умножения косинусного
напряжения,
приложенного к его аналоговому входу,
на код, пропорциональный
формируется
функциональным преобразователем из
выходного кодаФ
регистра RG2.
Функциональный
преобразователь выполнен на основе
тангенс-ного
ПЗУ.
Блок
УЦАП
осуществляет
операцию умножения косинусного
напряжения,
приложенного к его аналоговому входу,
на код, пропорциональный![]() подаваемый
на его цифровые входы с выхода ПЗУ.
подаваемый
на его цифровые входы с выхода ПЗУ.
В
результате поразрядного сравнения в
БС
синусного
напряжения с напряжением,
полученным на выходе УЦАП,
в
регистре
![]() формируется
код, про-
порцнональный углу в пределах октанта.
Полный ход угла образуется из кода
регистра
формируется
код, про-
порцнональный углу в пределах октанта.
Полный ход угла образуется из кода
регистра
![]() (старшие
разряды) н кода регистра
(старшие
разряды) н кода регистра
![]() (младшие
разряды).
(младшие
разряды).
Недостатком построения ЦПП по схеме, представленной на рис. 12.7, является то, что он, обеспечивая преобразование сигналов СКДУ, не может работать с другими типами датчиков угла, например преобразующими угол поворота в ли-нейное напряжение (резистивные н индукционные потенциометры, линейные вра-щающиеся трансформаторы).
С целью
устранения этого недостатка предложена
схема [а. с. 1096674 (СССР)],
в которую дополнительно к предыдущей
схеме введены преобразова-тель
линейного напряжения ПЛН,
источник
опорного напряжения ИОИ,
ком-мутатор
![]() мультиплексор
МР
и
задатчик режима работы ЗРР
(рис.
12.8).
мультиплексор
МР
и
задатчик режима работы ЗРР
(рис.
12.8).
В первом
режиме работы задатчик ЗРР
через
коммутатор
![]() подключает
выходы
СКВТ
к
входам парафазных усилителей ПУ,
а
выходы ПЗУ—к
входам УЦАП.
подключает
выходы
СКВТ
к
входам парафазных усилителей ПУ,
а
выходы ПЗУ—к
входам УЦАП.
Преобразователь угла поворота вала в код работает в режиме функционального аналого-цифрового преобразования ФАЦП, реализуя зависимость
![]()
где 0 —
угол поворота синусно-косинусного
датчика; Ф — выходной код регистра![]()
Во втором режиме задатчака ЗРР мультиплексор МР подключает к управ-
ляющим
входам УЦАП
непосредственно
выходы разрядов регистра
![]() В
этом
В
этом
случае на один из входов парафазных усилителей ПУ подается напряжение
с выхода ПЛН, а на второй — опорное напряжение от ИОН, я преобразователь
работает в режиме линейного аналого-цифрового преобразования (ЛАЦП).
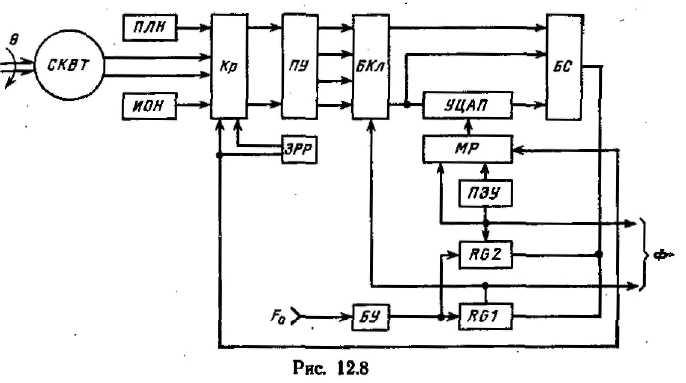
Блок БУ
формирует серию
тактовых импульсов, которые обеспечивают
последовательное
включение ключей Кл1,
КлЗ, Кл8 блока
БКл (аналогичного БКл
на
схеме рис. 12.7) и поразрядное переключение
регистров![]()
Ключе Кл2, Кл4—Кл7 работают только в режиме функционального преобразовання СКВТ в код, а в режиме линейного аналого-цифрового преобразования не участвуют.
В первом
такте преобразования знак входного
напряжения определяетеся следующим
образом. Включается ключ Кл1,
который
подключает входное напряжение
с выхода ПЛН
в
прямой фазе к ВС.
Если
при сравнении входное напряжение
положительное, то в регистре![]() в
старшем разряде формируется нулевое
значение, если отрицательное — единичное.
в
старшем разряде формируется нулевое
значение, если отрицательное — единичное.
Во
втором такте включается ключ К,л8,
который
подключает опорное напряжение
от ИОН
в
прямой фазе к БС,
чем
подтверждается положительное-значение
НОН,
и
результат записывается в следующий
разряд регистра![]() В
третьем также включается такая пара
ключей Кл1,
КлЗ и
Кл8,
которая
обеспечивает
подключение ко входам БС
модулей
входного и опорного напряжений..
Необходимая
пара ключей определяется анализом
значений двух старших разрядов
в регистре
В
третьем также включается такая пара
ключей Кл1,
КлЗ и
Кл8,
которая
обеспечивает
подключение ко входам БС
модулей
входного и опорного напряжений..
Необходимая
пара ключей определяется анализом
значений двух старших разрядов
в регистре![]()
Последующее преобразование, начиная с четвертого такта, выполняется путем поразрядного уравновешивания при последовательном переключении разрядов в регистре, начиная со старшего разряда.
В основу
работы преобразователя в режиме
линейного АЦП
положено-использование
зависимости
![]() где
где
![]() —выходное
напря-
—выходное
напря-
жение
ПЛН;
![]() —
опорное напряжение;
—
опорное напряжение;![]() —
код регистра
—
код регистра![]() —
количествоего
разрядов.
—
количествоего
разрядов.
В
результате сравнения в БС
выходного
напряжения ПЛН
с
напряжением, получаемым
на выходе УЦАП,
в
регистре
![]() формируется
код, пропорциональный
выходному напряжению ПЛН.
Полный
код образуется из старшего-разряда
регистра
формируется
код, пропорциональный
выходному напряжению ПЛН.
Полный
код образуется из старшего-разряда
регистра![]() (знаковый
разряд) в кода регистра (младшие
(знаковый
разряд) в кода регистра (младшие
![]() разряды).
Таким образом, преобразователь может
быть использован как в режиме-функционального
преобразования сигналов СКВТ в код,
так и в режиме линейного
АЦП.
разряды).
Таким образом, преобразователь может
быть использован как в режиме-функционального
преобразования сигналов СКВТ в код,
так и в режиме линейного
АЦП.
Рассмотренные варианты построения ЦПП с тангенсным ПЗУ (рис. 12.7 и 12.8) позволяют упростить отсчетную часть преобразователя за счет исключения (компараторов и логических устройств формирования кода квадрантов [3] или октантов [22, 81]. Однако это упрощение достигается за счет снижения быстро-действия ЦПП, недостатком которых следует считать и ограниченные функциональные возможности в части получения кодов тригонометрических функций преобразуемого угла при работе с СКДУ.