

6.3. Пфк на основе цифровых фсс
На рис. 6.4 приведена упрощенная функциональная схема компенсационного ПФК с использованием системы следящего уравновешивания [22]. Сигнальное
![]() напряжение
с выхода ФВ
подается
на компенсационный электронный
фазовращатель
ЭФВ,
фазовый
сдвиг которого зависит от кода
реверсивного счетчика PC.
Выходной
сигнал ЭФВ
поступает
на один из входов фазочувствительного
детектора ФЧД,
на
второй вход которого подается опорное
напряжение
напряжение
с выхода ФВ
подается
на компенсационный электронный
фазовращатель
ЭФВ,
фазовый
сдвиг которого зависит от кода
реверсивного счетчика PC.
Выходной
сигнал ЭФВ
поступает
на один из входов фазочувствительного
детектора ФЧД,
на
второй вход которого подается опорное
напряжение![]() Сигнал
рассогласования с выхода ФЧД
подается
на первые входы
Сигнал
рассогласования с выхода ФЧД
подается
на первые входы
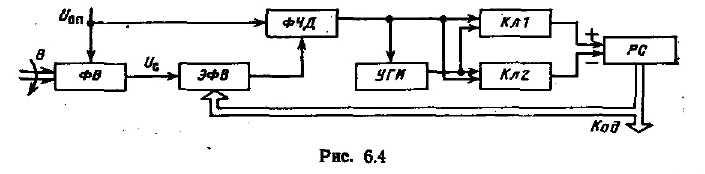

ключей Кл1 и Кл2, вторые входы которых подсоединены к выходу управляемого генератора УГИ. Частота следования импульсов УГИ зависит от амплитуды напряжения с выхода ФЧД. В зависимости от знака рассогласования ключи Кл1 или Кл2 открываются, пропуская импульсы с УГИ на входы сложения или вычитания реверсивного счетчика PC. Таким образом, на выходе счетчика PC образуется код, пропорциональный перемещению 6. Точность рассмотренной схемы зависит в основном от погрешностей компенсационного ЭФВ н погрешностей ФСС.
Для повышения быстродействия компенсационных ПФК можно использовать, например, ФСС в режиме переменного шага (а. с. 383205 (СССР)]. Функциональная схема такого ПФК представлена на рис. 6.5. В этой схеме сигнал рассогласования с выхода ФЧД, получаемый, как и в предыдущей схеме, управляет через формирователь знака ФЗ работой счетчика PC, переводя его соответственно в режим вычитания или сложения. Сигнал рассогласования при помощи формирователя ФЗ открывает схему И, которая пропускает импульсы с генератора ГИ на счетчик PC. При отсутствии напряжения на выходе ФЧД (сигнал рассогласования равен нулю) схема Я закрывается и на счетчике PC получаем код, пропорциональный входному перемещению 6.
Существенное
отличие данной схемы состоит в том, что
параллельно схеме ФСС,
работающей, как и в предыдущем случае,
в режиме следящего уравновешивания,
подключается блок переменного шага
БПШ
(многоэталонный
быстродействующий
преобразователь), который управляет
работой счетчика PC.
Включение
блока БПШ
происходит
при скачкообразном изменении перемещения
9 или в случае, когда скорость перемещения
превышает предельно допустимую
скорость работы ПФК и соответственно
скорость изменения фазы. При этом
БПШ
устанавливает
в ФСС значение фазового сдвига между![]() за
время, не превышающее нескольких
периодов сигнального напряжения
за
время, не превышающее нескольких
периодов сигнального напряжения![]() Точность
работы БПШ
при
этом определяется
Точность
работы БПШ
при
этом определяется![]() двоичным
разрядом, где
двоичным
разрядом, где
![]() —
младший разряд двоичного кода ФСС.
—
младший разряд двоичного кода ФСС.
Затем блок БПШ отключается и ФСС следящего уравновешивания точно устанавливает значение измеряемого фазового сдвига за 1—2 переключения счетчика PC. Включенный в цепь местной обратной связи дифференциатор Д обеспечивает устойчивость динамического режима ФСС подобно тахогенератору в схеме ПФК с электромеханической ФСС (см. рис. 6.2). Он вырабатывает пропорциональное частоте генератора ГИ постоянное напряжение, поступающее на схему сложения СС, где оно складывается с выходным напряжением ФЧД [11]
Если в
схеме компенсационного фазовращателя
ЭФВ
имеются![]() -цепи,
то,следовательно,
сигнал рассогласования будет зависеть
от нестабильности частоты
опорного напряжения
-цепи,
то,следовательно,
сигнал рассогласования будет зависеть
от нестабильности частоты
опорного напряжения
![]() что
скажется на точности ПФК в целом. Эта
что
скажется на точности ПФК в целом. Эта
погрешность является существенным недостатком рассмотренной схемы (рис. 6.5). Методы уменьшения частотное погрешности достаточно подобно были рассмотрены в гл. 5. Поэтому здесь можно лишь подчеркнуть возможность использования практически всех этих методов в схемах ПФК компенсационного типа: В частности, в [11] приведена схема, в которой частотная погрешность уничтожается известным методом за счет питания ФВ от ГИ через делитель частоты и фильтр.
Для увеличения разрешающей способности ПФК компенсационного тала можно также использовать, например, известные методы преобразования частот (см. гл. 5).
На рис.
6.6 представлена упрощенная схема
компенсационного ПФК с цифровой
ФСС, построенная на применении одного
из этих методов [а. с. 245914, (СССР)].
Опорное
![]() и
сигнальное
и
сигнальное
![]() напряжения
с выхода ФВ подаются
напряжения
с выхода ФВ подаются
в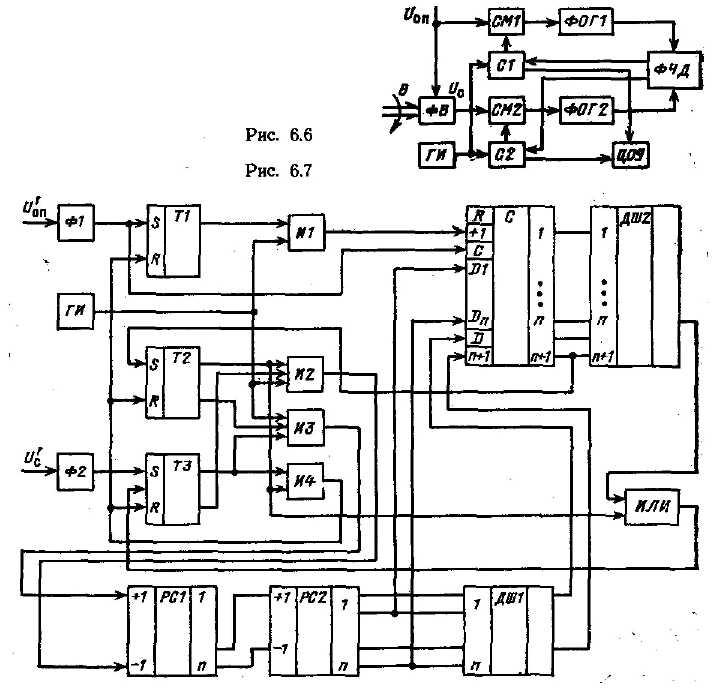 два идентичных канала, включающих в
себя смесителиCM1
и СМ2
и фильт-. ры-ограннчители
Ф0Г1
и
ФОГ2
(аналогично
схеме рис. 5.25). Однако в отличие
от схемы рис 5.25 в данной схеме используются
два гетеродина, в
качестве которых применены триггерные
счетчики С1
и
С2
с
коэффициентом деления
частоты
два идентичных канала, включающих в
себя смесителиCM1
и СМ2
и фильт-. ры-ограннчители
Ф0Г1
и
ФОГ2
(аналогично
схеме рис. 5.25). Однако в отличие
от схемы рис 5.25 в данной схеме используются
два гетеродина, в
качестве которых применены триггерные
счетчики С1
и
С2
с
коэффициентом деления
частоты
![]() Импульсы
с выхода генератораГИ
с
частотой
Импульсы
с выхода генератораГИ
с
частотой
![]() поступают
на входы этих счетчиков, и, таким
образом, на входе смесителей СМ1
и
СМ2
получаем
два сигнала с частотой
поступают
на входы этих счетчиков, и, таким
образом, на входе смесителей СМ1
и
СМ2
получаем
два сигнала с частотой![]()
С выходов
фильтров-ограничителей Ф0Г1
и ФОГ2 сформированные
прямоугольные
напряжения, сдвиг фаз между которыми
равен сумме фазовых сдвигов между
выходными напряжениями счетчиков CJ
и
С2
и
напряжениями
![]() и
и
![]() поступают
на фазочувствительный детектор ФЧД.
Выходные
импульсы ФЧД,
поступающие
(в зависимости от знака рассогласования)
на счетчики С1
или
С2,
обеспечивают
синфазность входных напряжений ФЧД
за
счет соответствующего
изменения фазового сдвига между
выходными напряжениями счетчиков.
Очевидно, что при этом сдвнг фаз между
входными напряжениями счетчиков
С1
н
С2
становится
однозначно равным сдвигу фаз между
поступают
на фазочувствительный детектор ФЧД.
Выходные
импульсы ФЧД,
поступающие
(в зависимости от знака рассогласования)
на счетчики С1
или
С2,
обеспечивают
синфазность входных напряжений ФЧД
за
счет соответствующего
изменения фазового сдвига между
выходными напряжениями счетчиков.
Очевидно, что при этом сдвнг фаз между
входными напряжениями счетчиков
С1
н
С2
становится
однозначно равным сдвигу фаз между
![]() и
и
![]() Цифровое
отсчетное устройство ЦОУ
считывает
код, записанный в одном из
счетчиков в момент перехода в нулевое
состояние другого счетчика. Для
уменьшения
влияния внешних помех детектор ФЧД
может
быть снабжен фильтром.
Изменяя частоту генератора ГИ,
можно
легко перестроить рассмотренную
схему на любой диапазон частот измеряемых
сигналов.
Цифровое
отсчетное устройство ЦОУ
считывает
код, записанный в одном из
счетчиков в момент перехода в нулевое
состояние другого счетчика. Для
уменьшения
влияния внешних помех детектор ФЧД
может
быть снабжен фильтром.
Изменяя частоту генератора ГИ,
можно
легко перестроить рассмотренную
схему на любой диапазон частот измеряемых
сигналов.
Как следует из принципа действия рассмотренной схемы (рис. 6.6), для правильной ее работы необходимо соблюдать точное фазирование и равенство частот входного в компенсационного сигналов. Последнее замечание, впрочем, относится ко всем ПФК компенсационного типа с цифровыми ФСС. Однако ори практической реализации это в ряде случаев представляет значительную сложность и как следствие приводит к дополнительному усложнению схемы ПФК в целом.
Поэтому
представляет определенный интерес
схема компенсационного ПФК, приведенная
в {17], где фазирование и равенство частот
входного и
компенсационного
сигналов достигается в достаточной
степени простыми средствами полностью
на дискретных элементах (рис. 6.7). Схема
работает следующим образом.
Опорное
![]() и
сигнальное
и
сигнальное![]() напряжения
поступают на формирователи
Ф1
и
Ф2,
которые
формируют старт- и стоп-импульсы.
Старт-импульс с
выхода Ф1 устанавливает триггер 77 в
состояние 1. При этом открывается элемент
И1,
пропуская
импульсы генератора ГИ
на
счетчик С.
Одновременно
с
этим старт-импульс поступает напрямую
на счетный вход счетчика С, пере-писывая
тем самым в него дополнительным кодом
содержимое реверсивного счетчика
РС2.
При
этом дополнительный старший разряд
счетчика С
через
дешифратор
ДШ1
переходит
в состояние 0, если старший разряд РС2
находится
в нулевом состоянии, а хотя бы один из
остальных разрядов находится
напряжения
поступают на формирователи
Ф1
и
Ф2,
которые
формируют старт- и стоп-импульсы.
Старт-импульс с
выхода Ф1 устанавливает триггер 77 в
состояние 1. При этом открывается элемент
И1,
пропуская
импульсы генератора ГИ
на
счетчик С.
Одновременно
с
этим старт-импульс поступает напрямую
на счетный вход счетчика С, пере-писывая
тем самым в него дополнительным кодом
содержимое реверсивного счетчика
РС2.
При
этом дополнительный старший разряд
счетчика С
через
дешифратор
ДШ1
переходит
в состояние 0, если старший разряд РС2
находится
в нулевом состоянии, а хотя бы один из
остальных разрядов находится
B СОСТОЯНИИ 1.
Во всех других случаях дополнительный разряд счетчика С устанавливается в состояние 1. Разрешение на прохождение стоп-импульса дается с дешифратора ДШ2 через элемент ИЛИ, как только старший и дополнительный разряды счетчика С устанавливаются в состояние 1. При этом триггеры Т2 и ТЗ и элементы И2 и ИЗ совместно с генератором ГИ формируют пачки импульсов по двум выходам, причем знак рассогласования определяет выход, с которого снимаются эти пачки импульсов (И2 или ИЗ).
В каждой сформированной пачке число импульсов пропорционально значению временного рассогласования между стоп-импульсом и выходным импуль-сом счетчика С. Пачки импульсов с выходов элемента И2 или ИЗ подаются на реверсивный счетчик РС1, предназначенный для уменьшения рассогласования между стоп-импульсом и выходом счетчика С и последовательно подключенный к счетчику РС2. При этом счетчик PCI выполняет в схеме функцию дискретного интегрирующего звена, а изменение емкости РС1 позволяет в до-
статочно широких: пределах регулировать добротность ФСС, что повышает точность ПФК в целом. Выходной код преобразователя снимается со счетчика РС2 и соответствует при нулевом рассогласовании измеряемому перемещению 6.
В заключение следует отметить, что цикл измерения прекращается, как только триггеры Т2 а ТЗ переходят в состояние 1, открывая элемент И4, выходной сигнал которого переводит Т1 и 77 в нулевое состояние. С приходом очередного старт-импульса начинается следующий цикл измерений.
Точность рассмотренных схем ПФК компенсационного типа с цифровыми ФСС, как уже отмечалось, во многом зависит от статических погрешностей компенсационного фазовращателя ЭФВ и фазочувствительного детектора ФЧД, которые являются основными узлами схем ПФК данного типа. Исследованию погрешностей и разработке методов повышения точности этих узлов посвящено большое количество работ [1, 3, 5, 7, 11, 17, 22, 26, 34, 35], и поэтому здесь структуры их построения рассматриваться не будут, тем более что, например, компенсационный фазовращатель ЭФВ относится к преобразователям код-фаза, которым посвящено не меньшее число работ [5, 13, 17, 22, 26, 42, 45], а рассмотрение этих вопросов выходит за рамки данной книги.
Рассмотрим один из возможных вариантов построения ПФК компенсационного типа с цифровой ФСС, где в качестве фазовращателя ЭФВ применяется преобразователь код — фаза с использованием счетчиков импульсов. Функциональная схема такого ПФК, построенная на использовании принципа фазовой автоподстройки частоты £17], приведена на рис. 6.8.
Схема
включает в себя два контура фазовой
автоподстройки частоты ФАПЧ1
а ФАПЧ2, каждый
из которых служит соответственно для
опорного
![]() и
сигнального
и
сигнального![]() напряжений,
сдвиг фаз между которыми необходимо
измерить. Оба контура ФАПЧ
построены
по аналогичным схемам.
напряжений,
сдвиг фаз между которыми необходимо
измерить. Оба контура ФАПЧ
построены
по аналогичным схемам.
Входные
сигналы
![]() поступают
на входы фазосдвигающих эле-
поступают
на входы фазосдвигающих эле-
ментов
ФЭ1
и
![]() соответственно,
где сдвигаются по фазе наДалее,
соответственно,
где сдвигаются по фазе наДалее,
![]()
проходя
через делители напряжений ДИ1
и
![]() сдвинутые
по фазе сигналы
сдвинутые
по фазе сигналы
суммируются
с сигналами
![]() в
суммирующих усилителях У1
и
в
суммирующих усилителях У1
и![]()
В фазовых
детекторах ФД1
и
![]() происходит
сравнение по фазе выходных
происходит
сравнение по фазе выходных
сигналов
усилителей и реверсивных счетчиков
РС2
и![]() Сигнал
рассогласо-
Сигнал
рассогласо-

вания
с выходов ФД
подается
на преобразователи напряжение — частота
ПНЧ1
и![]() ,
Выходные импульсы ПНЧ
поступают
на входы сложения или
,
Выходные импульсы ПНЧ
поступают
на входы сложения или
вычитания
(в зависимости от знака сигнала
рассогласования) последовательно
соединенных
счетчиков РС2
и
![]() При
этом выходные коды РС1
и
При
этом выходные коды РС1
и![]()
плавно
в пределах единицы младшего разряда
счетчиков РС2
и
![]() управ-
управ-
ляют коэффициентами передачи делителей ДН.
Таким
образом, в схеме осуществляется
регулировка сдвига фаз выходных сигналов
У1
и
У2
до
момента совпадения их с фазами выходных
сигналов счетчиков
РС2
и
![]() В
этот момент сигнал рассогласования в
каждом из
В
этот момент сигнал рассогласования в
каждом из
контуров
ФАПЧ
становится
равным нулю, а выходной код ПФК.
определяемый
как разность кодов счетчиков РС1
и
РС2
обоих
ФАПЧ,
соответствует
измеряемому
фазовому сдвигу между входными сигналами![]() При
При
этом преобразователи ПНЧ и реверсивные счетчики PC выполняют роль интегрирующих звеньев в прямой цепи преобразования. Компенсационными фазовращателями ЭФВ в данной схеме являются реверсивные счетчики PC совместно с генератором ГИ, т. е. фазовый сдвиг выходных напряжений такого типа ЭФВ пропорционален значению кода счетчиков PC. Суммирующий усилитель У2, на входы которого подаются выходные напряжения ФД обоих контуров ФАПЧ, введен в схему ФАПЧ для уменьшения динамической погрешности. Статическая точность ПФК рассматриваемого типа определяется смещением нулевых положений детекторов ФД.
Следует подчеркнуть, что схемы ПФК компенсационного типа в общем случае наиболее эффективны при высокочастотных наводках во входных цепях преобразователя для случая, когда отсутствуют влияния гармонических составляющих помехи.
В заключение рассмотрим несколько конкретных схем компенсационных ПФК с использованием в качестве первичного преобразователя СКВТ.
Функциональная
схема одного ПФК такого типа представлена
на рис. 6.9 [49].
На роторную обмотку СКВТ
подается
синусоидальное напряжение
![]() В
результате возникновения в воздушном
зазоре между ротором и статором
пульсирующего магнитного поля в
статорных квадратурных обмотках
наводятся
В
результате возникновения в воздушном
зазоре между ротором и статором
пульсирующего магнитного поля в
статорных квадратурных обмотках
наводятся![]()

Эти ЭДС
поступают на входы двух фазочувствительных
выпрямителей ФЧВ,
на
другие входы которых поступают
прямоугольные периодические меандры,
причем их фаза пропорциональна
отработанному системой ФСС углу,
значение
которого хранится в реверсивной счетчике
PC.
Периодические
меандры появляются
на выходах цифрового сравнивающего
устройства ЦСУ
в
результате
сравнения кода PC,
соответствующего
цифровому эквиваленту угла, отработанного
ФСС, и кода с выхода счетчика-делителя
генератора Г
питания,
соответствующего
значению текущей опорной фазы питающего
напряжения, причем
с первого выхода ЦСУ
на
вход ФЧВ
поступают
периодические меандры, первая
гармоника которых![]() ,
а со второго выхода — меандры, первая
,
а со второго выхода — меандры, первая
гармоника
которых![]() .
Фазочувствительные выпрямители
осуществля-
.
Фазочувствительные выпрямители
осуществля-
ют умножение напряжений с квадратурных статорных обмоток и с выходов ЦСУ [49].
В результате умножения на выходах ФЧВ имеются напряжения
![]()
которые
вычитаются на суммирующем усилителе
СУ:
![]() В
резуль-
В
резуль-
тате вычитания на выходе СУ имеется постоянная составляющая напряжения
![]() пропорциональная
рассогласованию между фактическим
угловым положением
вала и
показанием
PC,
т.
е. тем углом, который отработала следящая
система:
пропорциональная
рассогласованию между фактическим
угловым положением
вала и
показанием
PC,
т.
е. тем углом, который отработала следящая
система:![]()
Кроме
того, в выходном напряжении усилителя
присутствуют высшие гармонические
составляющие![]() которые
затем отфильтровываются фильтром Ф,
Управляющий
выходной сигнал Ф
поступает
на ПНЧ,
который
выдает последовательность
импульсов. Частота повторения их зависит
от величины рассогласования
которые
затем отфильтровываются фильтром Ф,
Управляющий
выходной сигнал Ф
поступает
на ПНЧ,
который
выдает последовательность
импульсов. Частота повторения их зависит
от величины рассогласования
![]() Импульсы
поступают в зависимости от знака
рассогласования
на тот или другой вход PC.
Например,
когда вал СКВТ
находится
в положении покоя и повернут на угол
Импульсы
поступают в зависимости от знака
рассогласования
на тот или другой вход PC.
Например,
когда вал СКВТ
находится
в положении покоя и повернут на угол![]() напряжение
рассогласования в устано-новившемся
режиме равно нулю и с
PC
счигывается
код, соответствующий углу
напряжение
рассогласования в устано-новившемся
режиме равно нулю и с
PC
счигывается
код, соответствующий углу![]() Если
вал поворачивается на некоторый угол
Если
вал поворачивается на некоторый угол![]() напряжение
рассогласования
достигает некоторого значения —
положительного, если приращение
напряжение
рассогласования
достигает некоторого значения —
положительного, если приращение![]() положительно,
в отрицательного, если приращение
положительно,
в отрицательного, если приращение
![]() отрицательно.
отрицательно.
Напряжение
рассогласования поступает на ПИЧ,
который
выдает последовательность
импульсов на вход +РС
или
—PC
в
зависимости от знака![]() Так
как существует цепь, связывающая СУ
н
ФЧВ,
по
мере приближения кода
PC
к
фактическому значению угла уменьшается
напряжение рассогласования
Так
как существует цепь, связывающая СУ
н
ФЧВ,
по
мере приближения кода
PC
к
фактическому значению угла уменьшается
напряжение рассогласования![]() а
с ним и частота импульсов с выхода ПНЧ,
Этот
процесс продолжается
до тех пор, пока напряжение рассогласования
не станет равным нулю, т.
е. до того момента, когда код PC
будет
соответствовать фактическому угло-:
вому положению вала. Таким образом,
преобразователь следит за входными
сигналами
и непрерывно преобразует их.
а
с ним и частота импульсов с выхода ПНЧ,
Этот
процесс продолжается
до тех пор, пока напряжение рассогласования
не станет равным нулю, т.
е. до того момента, когда код PC
будет
соответствовать фактическому угло-:
вому положению вала. Таким образом,
преобразователь следит за входными
сигналами
и непрерывно преобразует их.
Такой
преобразователь способен обеспечить
высокую точность преобразования
до![]() в
зависимости от класса применяемого
СКВТ.
Он
позволяет* преобразовывать
угловые положения вала СКВТ,
вращающегося
с частотой до
100 об/мин [49]. Однако его недостатком
является то, что время переход-ного
процесса, возникающего в ФСС преобразователя
при его включении, случайных сбоях
и больших ускорениях вращения вала,
достигает значительной величины,
что приводит к
снижению
быстродействия.
в
зависимости от класса применяемого
СКВТ.
Он
позволяет* преобразовывать
угловые положения вала СКВТ,
вращающегося
с частотой до
100 об/мин [49]. Однако его недостатком
является то, что время переход-ного
процесса, возникающего в ФСС преобразователя
при его включении, случайных сбоях
и больших ускорениях вращения вала,
достигает значительной величины,
что приводит к
снижению
быстродействия.
С целью повышения быстродействия предложена структура построения fa. с. 801022 (СССР)], в которой отсчетная часть работает по методу «бегущей стробирующей метки», что обеспечивается введением в схему двух компараторов К1, К2, фаэосдвигающего элемента ФСЭ и схемы ИЛИ (рис. 6.10).
Выходные напряжения СКВТ поступают на ФСЭ, который обеспечивает получение напряжения, фаза которого пропорциональна углу поворота. Далее сигнал с ФСЭ поступает на вход Kt, который фиксирует переход синусоидального напряжения от отрицательной полуволны к положительной. Сигнал с выхода К1 поступает на первый вход элемента ИЛИ, на другой вход которого поступает сигнал с выхода К.2, подключенного к выходу СУ. Порог срабатывания К2 выбирается исходя из соображений минимального времени переходного процесса в ФСС при сохранении высокой точности преобразования. При срабатывании элемента ИЛИ сигнал с его выхода поступает на установочный вход PC и вслед за тем код со счетчика делителя генератора питания Г, соответствующий углу поворота вала СКВТ, переписывается в реверсивный счетчик, т. е. отсчетная часть преобразователя работает по методу «бегущей стро-бирующей метки». Когда выходное напряжение СУ не превышает напряжения срабатывания К2, преобразователь работает в следящем режиме. При срабатывании К2 ЦПУ переходит в циклический режим.
Вторым недостатком преобразователя рис. 6.9 являются его критичность к асимметрии синусного и косинусного каналов первичного преобразователя и слабое подавление нечетных гармоник на выходе синхронных детекторов. Этого недостатка лишен компенсационный ПФК [а. с. 1022203 (СССР)], функциональная схема которого представлена на рис. 6.11,
Преобразователь содержит СКВТ, работающий в режиме фазовращателя, синхронные детекторы СД1 н СД2, фильтр нижних частот ФИЧ, преобразователь напряжение — частота ПНЧ, реверснонный счетчик PC, генератор частоты сетки ГЧС, синусно-косинусные генераторы СКП и СКГ2, преобразователи кода в напряжение ПКЦ1 и ПКН2 и тока Л/СП и ПКТ2. Схема работает следующим образом. На выходе фазовращателя наводятся напряжения
![]()
которые
постулают на входы синхронных
детекторов![]() На
их опорные входы
На
их опорные входы

с
выходов![]() подаются
сигналы
подаются
сигналы
![]()
При перемножения входного я опорного напряжений в СД1 получаем
![]()
где
![]() —коэффициент
передачиСД1,
а
—коэффициент
передачиСД1,
а
![]() Аналогично
на выходе
Аналогично
на выходе
СД2 получаем
![]()
где![]() —
коэффициент передачиСД2,
а
—
коэффициент передачиСД2,
а![]()
Напряжение на выходе сумматора СУ определяется выражением
![]()
Поскольку
![]() напряжение
второй гармоники на выходе СУ невелико.
Это-
напряжение
второй гармоники на выходе СУ невелико.
Это-
напряжение
подавляется фильтром нижних частот
ФНЧ,
тогда
на его выходе-получаем![]()
В
установившемся состоянии
![]() что
возможно только при
что
возможно только при![]() Таким
Таким
образом, асимметрия вторичных обмоток фазовращателя и неравенство коэффициентов передачи ФВ не приводят к появлению ошибки преобразователя. Поскольку напряжения на входах СУ равны нулю, недостаточное подавление синфазных сигналов в сумматоре также не приводит к появлению ошибок.
Взаимная компенсация в СУ напряжений второй гармоники, образующихся в СД, облегчает фильтрацию полезного сигнала в ФНЧ.
Отсутствие жестких требований к стабильности коэффициентов передач» СД позволяет использовать как релейные СД, так и гармонические. Гармонический СД характерен абсолютной частотной избирательностью, что позволяет исключить влияние всех гармоник, но он значительно проигрывает релейному: детектору в стабильности коэффициента передачи, что не позволяет использовать гармонические СД в известных преобразователях.
В рассматриваемом преобразователе отсутствуют погрешности вследствие небольших асимметрии и неперпендикулярности первичных обмоток фазовращателя и напряжений питания первичных обмоток (эффект фильтра обратной последовательности), что уменьшает влияние погрешностей самого фазовращателя,, а также позволяет снизить его напряжения питания. Использование гармонических синхронных детекторов снижает требования к содержанию гармоник в спектре напряжения питания фазовращателя, т. е. упрощает выполнение источника питания [50].
Дальнейшее повышение точности может быть достигнуто применением двух-отсчетных следящих ЦПУ, особенности построения которых рассмотрены в гл.7..