

1.2. Кинематика
Кинематика изучает движение материальных тел без учета их масс и действующих на них сил.
Основные определения. Под движением тела подразумевается изменение во времени его положения в пространстве по отношению к другим телам. Обычно с телом, по отношению к которому изучают движение, связывают какую-нибудь систему координат, которую вместе с выбранным способом измерения времени называют системой отсчета.
В зависимости от формы траектории движение точки бывает прямолинейным и криволинейным. Уравнение движения точки можно записать так
![]() ,
,
где S – путь, м, (мм); t – время, с, (ч).
Уравнение плоского движения точки в координатной форме выглядит так (рис.8)
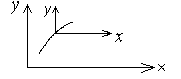
Рис. 8
Скорость есть мера движения точки (тела), V (м/сек).
![]() .
.
Скорость – величина векторная, так как она так же, как и сила, имеет направление и может быть выражена направленным отрезком.
При любом движении скорость точки равна первой производной координаты (т.е. расстояния от начала отсчета перемещения) по времени
![]() .
.
Ускорение – это мера изменения скорости, также величина векторная. Ускорение в прямолинейном движении равно
![]() .
.
Ускорение в криволинейном движении. При движении точки по криволинейной траектории скорость меняет свое направление. Таким образом, ускорение в криволинейном движении равно векторной производной скорости по времени. Обычно вычисляют не векторную производную, а более удобные для использования ее проекции на касательную и нормаль к точке, для которой вычисляют ускорение (рис.9).
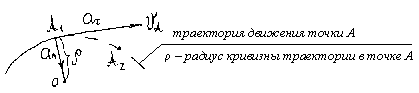
Рис. 9
Тогда полное ускорение а будет равно геометрической сумме
![]() или
или
![]() ,
,
Так как вектор характеризуется двумя параметрами, то векторная производная должна давать изменение обеих составляющих скорости – её абсолютной величины и направления
где
![]() – нормальная составляющая полного
ускорения, всегда направлена в сторону
вогнутости траектории;
– нормальная составляющая полного
ускорения, всегда направлена в сторону
вогнутости траектории;
![]() – касательная составляющая полного
ускорения.
– касательная составляющая полного
ускорения.
Простейшие движения твердого тела. Поступательное движение. Все точки твердого тела имеют одинаковые траектории, скорости и ускорения (рис.10).
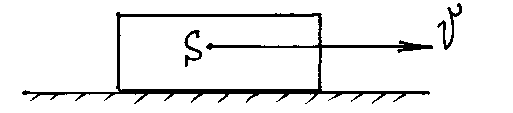
Рис. 10
Вращение вокруг неподвижной оси. Наглядный и наиболее часто встречающийся в жизни случай – вращение диска на оси О (рис.11).
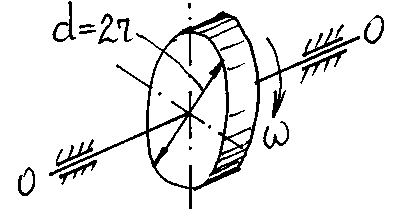
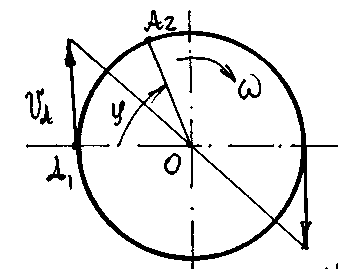
Рис.
11
Вращательное движение можно характеризовать углом , на который повернулось тело за время t. Угловое перемещение выражается в радианах (рад) или оборотах. Таким образом
![]() .
.
Обозначив путь А1А2 = S можно записать
![]() ,
,
где r – расстояние точки А до оси вращения.
И скорость любой точки диска определится так
![]() .
.
Выражение
![]() обозначим
и назовем угловой частотой (скоростью).
обозначим
и назовем угловой частотой (скоростью).
![]() рад/сек.
рад/сек.
Один оборот соответствует углу = 360° = 2 радиан. Если диск делает n оборотов в минуту, что соответствует углу = 2n радиан, то угловая частота в рад/сек будет
![]() .
.
Сложение скоростей. Пусть в неподвижной системе координат ХYZ (например, связанной с Землей) движется тело М, с которым связана система координат Х1Y1Z1 (например, пароход плывет по реке). И пусть по телу М движется точка (например, человек идет по палубе парохода).

Рис. 12
Движение точки А относительно тела М называется относительным движением. Движение тела М относительно неподвижной системы координат XYZ называется переносным. Движение точки А относительно неподвижной системы координат ХУZ называется абсолютным. Скорости в каждом движении, будучи векторными величинами, складываются геометрически (рис.12).
![]() .
.