

4. Элементы механики механизмов и машин
Теперь казалось бы можно перейти к особенностям расчета типовых деталей машин. Но для этого нужно решить еще ряд вопросов, связанных с кинематикой и динамикой. Остановимся на них.
4.1. Задачи механики машин
Механика механизмов и машин (часто ее называют «Теория механизмов и машин») является наукой, предназначенной для решения следующих прикладных технических задач:
1. Исследование кинематики и динамики механизмов с целью определения траекторий, скоростей и ускорений отдельных звеньев и их точек, а также действующих сил.
2. Разработка методов построения механизмов по заданным структурным, кинематическим и динамическим условиям.
Механика машин позволяет выбрать или создать схему механизма, удовлетворяющую его конкретному назначению, установить основные размеры звеньев, определить законы движения и силы, действующие на звенья.
Задачами других разделов механики (сопротивления материалов или механики деформируемого тела, деталей машин, технологии машиностроения и пр.) является определение прочных конструктивных размеров, решение вопросов технологии изготовления, монтажа и эксплуатации. Практически, при проектировании все эти задачи решаются комплексно. Однако именно теория механизмов и машин выясняет основной контур механизма или машины и дает исходные данные для исследования их со всех точек зрения, возникающих при проектировании.
Данный курс не ставит своей задачей рассмотрение вопросов синтеза (проектирования) механизмов. Мы остановимся только на некоторых задачах анализа, связанных с получением нужных данных для прочностных расчетов элементов машин.
4.2. Основные определения
Под машиной будем понимать такое искусственное сочетание тел, которое обладает определенным движением и служит для выполнения полезной работы или для преобразования какого-либо вида энергии в механическую и обратно.
Если рассматривать машину только с точки зрения основного механического движения, осуществляемого ее частями, отвлекаясь от тепловых, электрических и других процессов, происходящих в ней, то перед нами будет непосредственный носитель и реализатор механического движения – механизм, представляющий собой скелет машины. Механизм является тем главным органом машины, который обеспечивает выполнение машиной ее рабочих функций. Механизм является непосредственным объектом изучения механики механизмов и машин.
Механизм – подвижное соединение тел (звеньев), в котором при заданном движении одних (ведущих) все остальные (ведомые) имеют вполне определенные движения. Всякое подвижное соединение двух звеньев называется кинематической парой. Некоторые кинематические пары показаны на рис. 62
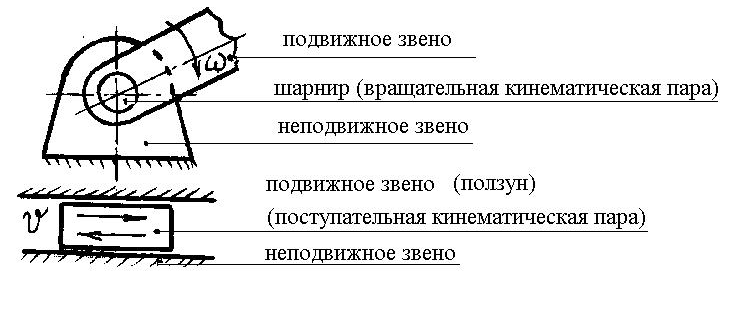
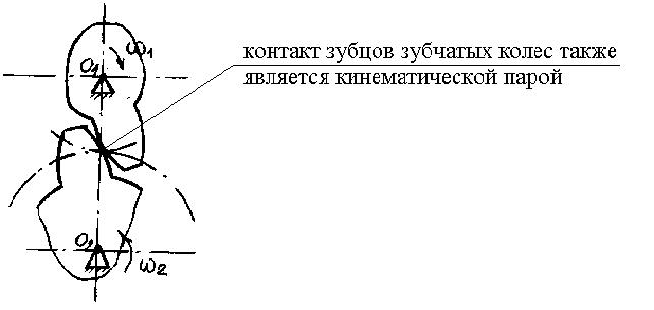
Рис. 62
На рис. 63 приведены схемы некоторых механизмов.
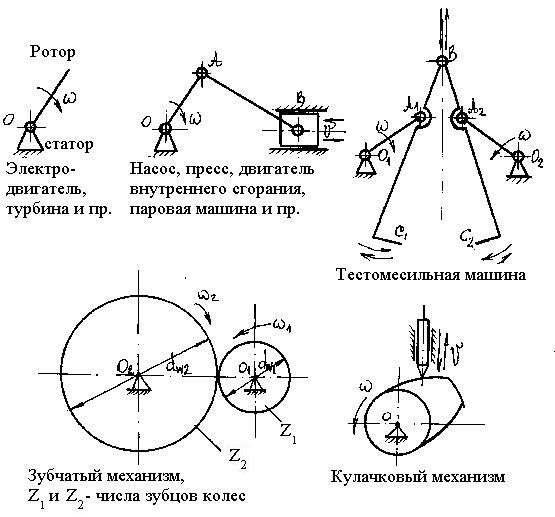
Рис. 63
4.3. Кинематика шарнирно-рычажных механизмов
Кинематический анализ ставит своей задачей определение траекторий, скоростей и ускорений любых точек механизма или угловых скоростей и ускорений любых его звеньев без учета сил, вызывающих это движение, т.е. рассматривает движение только с геометрической точки зрения. Кинематическое исследование механизмов может быть выполнено как графическими, так и аналитическими методами. И хотя первые, естественно, связаны с некоторыми погрешностями, неизбежными при графических построениях, они отличаются наглядностью (что часто позволяет избежать ошибок) и относительной простотой.
Задача первая – определение положений звеньев и траекторий, описываемых точками звеньев механизмов. Обычно задача решается графическим методом засечек и шаблонов. Для этого в выбранном масштабе μs
![]()
на одном чертеже строится ряд последовательных положений механизма, достаточно близко отстоящих друг от друга, и одноименные точки соединяются плавной кривой.
Задача вторая – определение скоростей точек механизма. Сделаем это также графическим методом – построением так называемых планов скоростей, хотя, разумеется, это можно сделать и аналитически. Рассмотрим метод на примере кривошипно-ползунного механизма, ведущее звено которого ОА (называемое обычно кривошипом) вращается с заданной постоянной угловой скоростью ω1 (рис. 64).
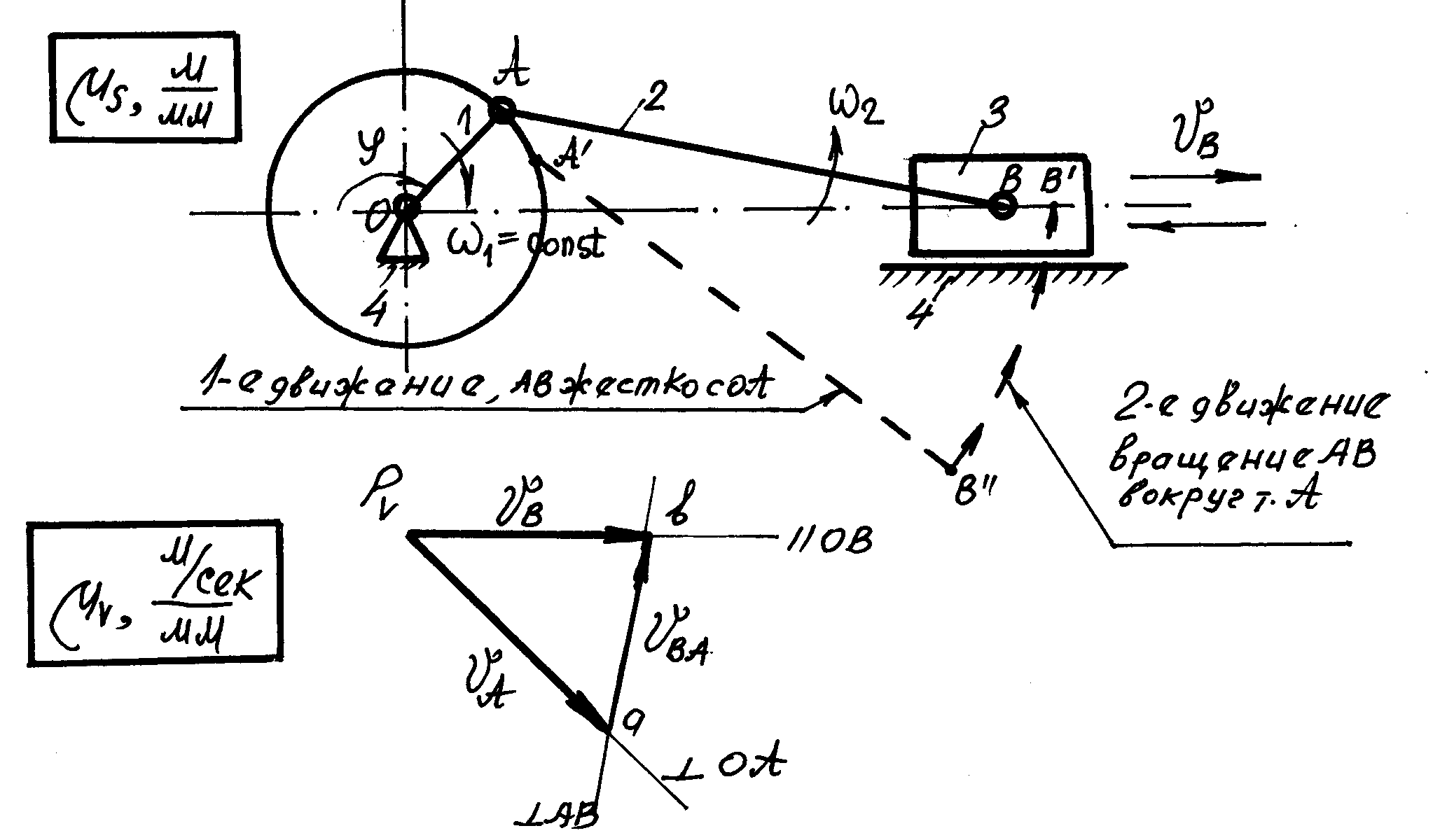
Рис. 64
Звено 2 – шатун АВ – совершает сложное плоское движение, ползун 3 движется возвратно-поступательно. Сначала определяются скорости шарнирных точек, а затем любых других. Начинаем со скорости точки А, так как она известна. Итак
1.
![]() .
.
Выбираем удобный масштаб скорости μv:

Из
произвольной точки (положение которой
выбирается из удобства расположения
чертежа), называемой полюсом плана
скоростей РV,
проводим
вектор VA![]() OA
в выбранном масштабе. Конец вектора VA
отметим малой буквой а
(рис. 64).
OA
в выбранном масштабе. Конец вектора VA
отметим малой буквой а
(рис. 64).
2. Для построения скорости точки В представим ее движение, состоящее из двух движений: поступательного переносного вместе с точкой А и вращательного относительного вокруг точки А. Рассмотрим их последовательно. Сначала жестко с ОА и затем вращение АВ вокруг точки А. Таким образом
![]() .
.
Из конца вектора VA (точка а) проводим направление скорости VBA звену АВ (на плане механизма). Затем из полюса РV (проводим направление скорости точки В – VB ). Точка пересечения направлений VBA и VB (точка в) даст в масштабе μV значение этих скороcтей. Удобно концы векторов скоростей точек обозначать на плане скоростей соответственными малыми буквами (как мы и делали). Угловая скорость (частота) 2-го звена АВ будет равна
 .
.
Приведем планы скоростей для положений механизма, определяемых углами φ=90 и 180° (рис. 65).
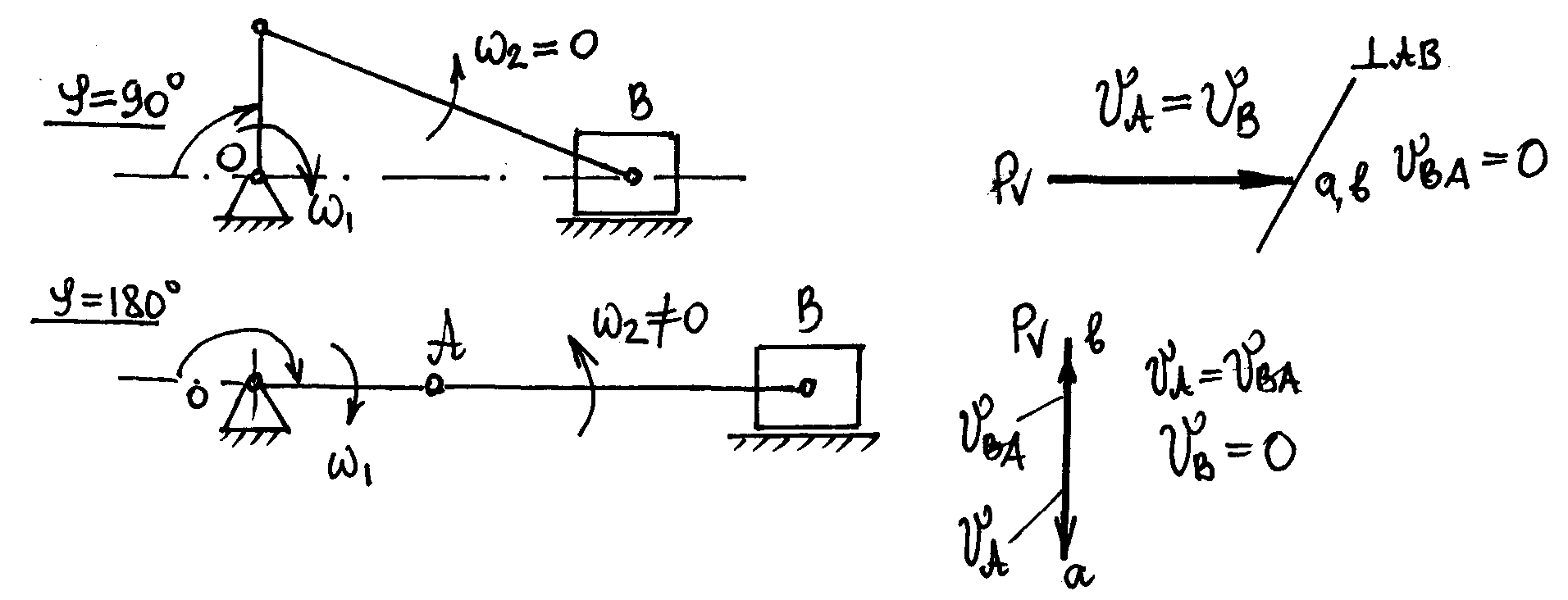
Рис. 65
Заметим, что планы ускорений, определяющие ускорения точек механизма, строятся аналогично планам скоростей.