

1. Основы механики твердого тела
В механике твердого тела даются базовые положения, лежащие в основе всех инженерных расчетов в области прочности материалов и конструкций, статики сооружений, механики машин и многих других приложений.
1.1. Статика
Основные понятия. Тело называют абсолютно твердым, если расстояние между любыми его точками не меняется при действии на него других тел (сил). Всякое тело можно считать взаимосвязанной совокупностью (системой) материальных точек. Абсолютно твердое тело представляет собой неизменяемую систему материальных точек.
Тело называется свободным, если никакие другие тела не препятствуют его перемещению в любом направлении. В противном случае тело называется связанным.
Сила (Ньютон) сообщает массе в 1 кг ускорение в 1 м/сек2. Сила есть вектор (векторами изображаются направленные величины: скорость, сила и т. п.) и графически изображается отрезком прямой со стрелкой, длина которого в определенном масштабе равна модулю вектора силы. Масштаб силы показывает сколько единиц силы (Ньютонов) содержится в единице длины отрезка (Н/мм). Обозначается сила буквой F (в системе Си).
Совокупность тел, каким-то образом связанных между собой, будем называть системой тел. Силы взаимодействия между телами, входящими в данную систему, называют внутренними, а силы, с которыми действуют на данную систему другие тела (не входящие в данную систему) — внешними. Если данную систему тел рассечь на части и рассматривать равновесие каждой части в отдельности, то внутренние для всей системы силы, действующие в сечениях, станут внешними силами для частей системы (рис.1).
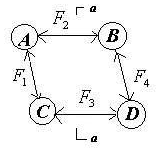
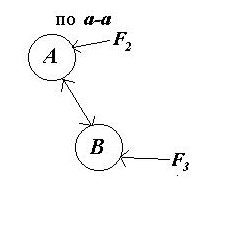
Рис.1
Аксиомы статики. Условия, при которых тело может находиться в равновесии, выводятся из нескольких основных положений, подтвержденных опытом и называемых аксиомами статики.
Аксиома 1. Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения, пока какие-нибудь силы не выведут тело из этого состояния. На основании этой аксиомы состоянием равновесия считается такое состояние тела, когда оно находится в покое или движется прямолинейно и равномерно (по инерции).
Аксиома 2. Силы взаимодействия двух тел между собой всегда равны по модулю и направлены по одной прямой в противоположные стороны (рис.2).
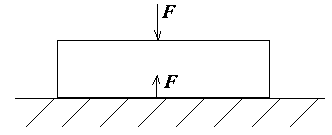
Рис. 2
Если какая-нибудь система сил, будучи приложена к свободному телу, не изменяет его механическое состояние, то она называется уравновешенной.
Механическое состояние твердого тела не нарушится от перенесения силы вдоль линии ее действия (рис.3).
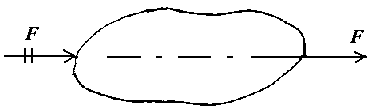
Рис. 3
Аксиома 3. Равнодействующая двух сил F1 и F2, приложенных к телу в одной точке, равна по модулю и совпадает по направлению с диагональю параллелограмма, построенного на данных силах (рис.4).
![]()
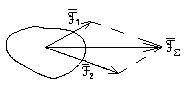
Рис. 4
Построение диагонали параллелограмма, сторонами которого являются заданные векторы, называется векторным или геометрическим сложением. Иногда геометрическое сложение обозначается черточками сверху, чаще просто нужно помнить, что сложение векторное. Силы, действующие на тело, делятся на активные и реактивные. Активные силы стремятся перемещать тело, реактивные — препятствуют этому.
Проекции силы на оси координат. В тех случаях, когда на тело действуют несколько сил, а также, когда направления некоторых из них неизвестны, удобно при решении задач пользоваться не геометрическим, а аналитическим условием равновесия, основанным на методе проекций. Проекцией силы на ось (в прямоугольной системе координат) называется отрезок оси, заключенный между двумя перпендикулярами, опущенными на ось из начала и конца вектора силы (рис.5).
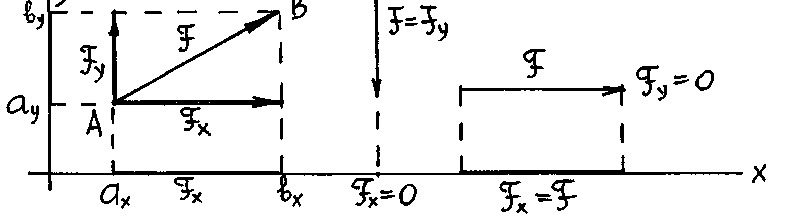
Рис. 5
Момент силы относительно точки. Моментом силы F относительно точки О называется произведение модуля силы на ее плечо h (рис.6).
![]()
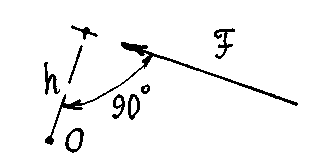
Рис. 6
Условие равновесия плоской системы сил. Очевидно, что плоская система сил будет находиться в равновесии, если равнодействующая этой системы сил будет равна нулю. Это значит, что силовой многоугольник, построенный на силах данной системы, должен быть замкнутым.
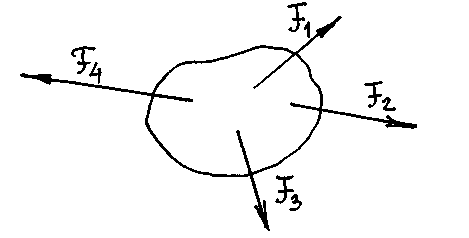
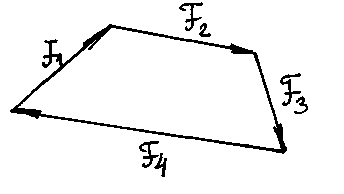
Рис. 7
Следовательно, алгебраическая сумма проекций сил на каждую из двух осей координат X и Y должна равняться нулю, т.е.
![]() ;
;
![]() .
.
Алгебраическая сумма моментов этих сил относительно любой точки плоскости также должна равняться нулю, т.е.
![]() .
.
Итак, условие равновесия для плоского случая записывается как
Условия равновесия пространственной системы сил. В трехосной ортогональной системе координат Х, Y, Z условия равновесия запишутся так
Таким образом, трем степеням свободы тела на плоскости соответствуют три условия равновесия. Шести степеням свободы тела в пространстве соответствуют шесть условий связи.
Сразу обратим внимание на то, что составление уравнений равновесия – один из основных общих методов решения задач механики, широко применяемый во всех её инженерных разделах и приложениях