

4.4. Силовой (кинетостатический) анализ механизмов
В силовом анализе решаются две основные задачи. Первая заключается в определении усилий (реакций) ,возникающих в шарнирах (кинематических парах), а также в определении уравновешивающего момента, который нужно приложить к валу ведущего звена (кривошипу), чтобы уравновесить производственную нагрузку, развиваемую механизмом для совершения полезной работы. Определение давлений в шарнирах производится после того, как определены все внешние силы (силы полезного сопротивления, т.е. именно те, которые совершают полезную работу) и силы инерции звеньев механизма. Определение усилий взаимодействия звеньев в шарнирах можно произвести по принципу Даламбера. Знание усилий в шарнирах позволяет провести прочностной расчет механизма и определить потери на трение, т. е. найти его КПД. Такой задачей мы заниматься не будем, она носит достаточно специальный характер. Часто при проектировании машины нужно определить только мощность двигателя, обеспечивающего работоспособность машины, а усилия в шарнирах искать не надо. Рассмотрим эту задачу.
При проектировании механизма всегда задается технологическая сила полезных сопротивлений Fпc, т.е. сила, которая в проектируемом механизме и совершает полезную работу. Эта сила может задаваться численно, аналитически или графически и в течение рабочего цикла она может быть постоянной или нет (рис. 66).

Рис. 66
При проектировании любой машины прежде всего должна быть определена потребная для ее работы приводная мощность, или, как говорят, мощность движущих сил РДВ. Это делается из условия, что при установившемся рабочем режиме работа, выполненная за цикл движущими силами, должна быть равна работе сил сопротивления. Пренебрегая в первом приближении вредными сопротивлениями (трением в шарнирах) можно записать
![]() ,
,
где АДВ и Апc – работа сил движущих и сил полезного сопротивления, соответственно. Напомним, энергией тела называется способность тела производить работу (энергия от греческого слова «действие», работоспособность). Энергией обладает всякое тело, могущее служить источником работы. Двигаясь тело совершает работу. Энергия движения – КИНЕТИЧЕСКАЯ ЭНЕРГИЯ.
Тело, находящееся в покое, и в любой момент могущее начать производить работу, обладает «запасом» энергии, которая называется ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ.
Чтобы оценить насколько быстро совершается работа вводится понятие мощности. Если работа совершается во времени равномерно, то
![]()
Р
– мощность (![]() ),
А – работа (НМ), t
– время (сек).
),
А – работа (НМ), t
– время (сек).
Если не равномерно, то
![]()
Задача определения потребной для машины мощности решается в следующем порядке:
1. Вычерчивается в выбранном масштабе μS ряд последовательных положений механизма (8–12, охватывающих весь рабочий цикл; обычно это один оборот ведущего вала механизма), схема которого и размеры звеньев должны быть известны (заданы конструктором или из каких-то соображений определены ранее) и строится траектория движения рабочего органа механизма, к которому приложена сила полезных сопротивлений (усилие прессования, резки, усилие на рабочий орган тестомесильной машины и т. п.). На рис. 67 в качестве примера показан кривошипно-ползунный механизм, к рабочему звену которого (ползуну) приложена сила полезных сопротивлений, заданная графически.
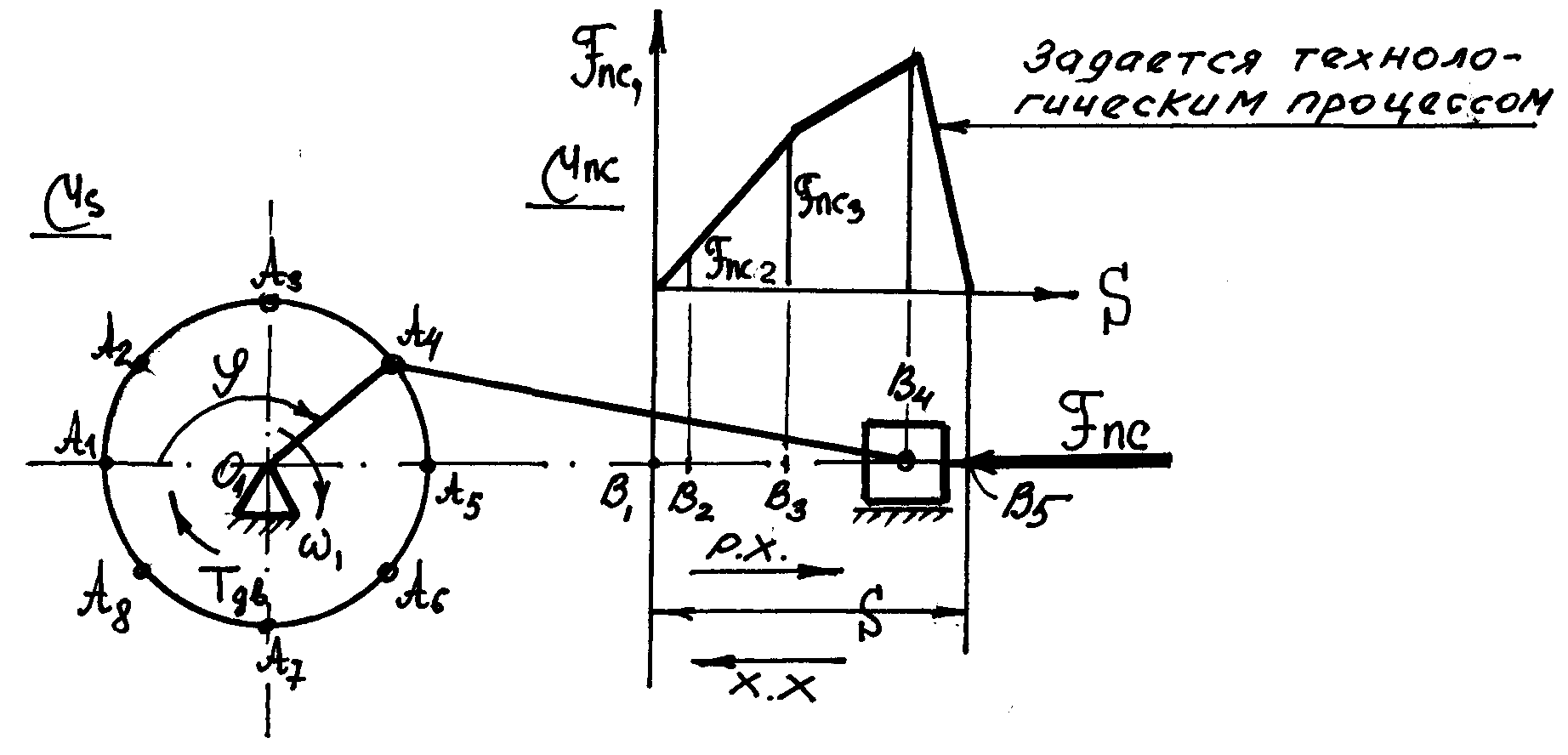
Рис. 67
Рабочая траектория ползуна – прямая В–В. Для всех i-х положений механизма определяется приведенное к вeдyщeмy валу О1 мгновенное значение момента сил полезного сопротивления Тпc.
![]() ,
,
где Fпci – значение силы полезного сопротивления, соответствующее данному i-му (например, в нашем случае i= 1; 2; 3; ... ; 8) положению механизма, VBi – скорость точки приложения (в нашем случае В) Fпci , и вычерчивается график Тпc – φ (рис. 68).
2. Графическим интегрированием этого (Тпc – φ) графика строится график работы сил полезного сопротивления Апc за один цикл (цикл – это один рабочий и один холостой ход). Он также показан на рис. 68. Масштаб графика А будет
![]() ,
,
где φpx – угол поворота ведущего звена ОА, соответствующий рабочему ходу; φxx – угол поворота кривошипа ОА, соответствующий холостому ходу.
Как уже отмечалось, для рабочих машин в большинстве случаев цикл равен одному обороту звена ОА или 2π радиан.
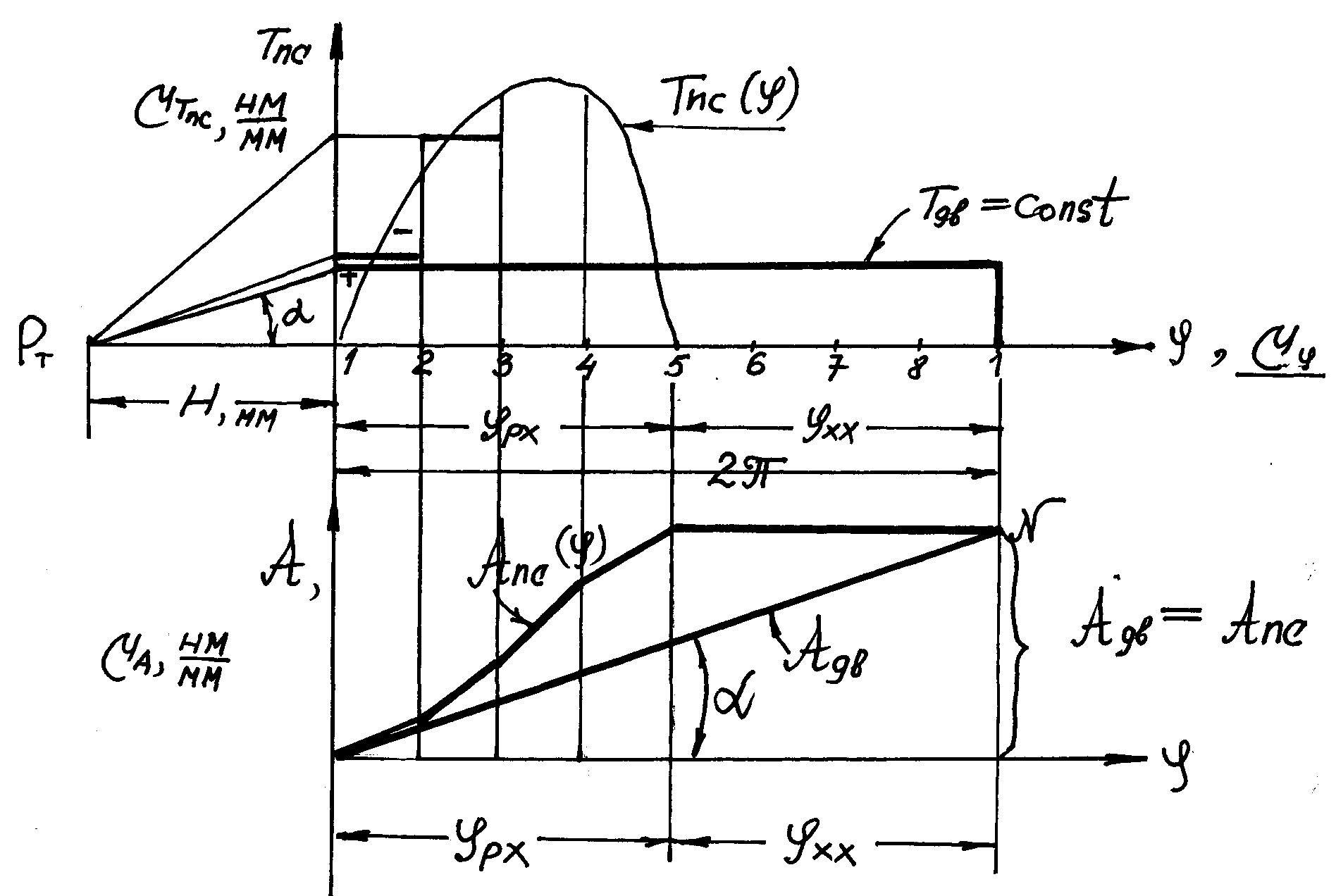
Рис. 68
Как видно из графика (рис. 68) на участке холостого хода работа Апc остается постоянной. Так как в большинстве случаев рабочие машины приводятся в движение электродвигателями, мощность и число оборотов каждого типоразмера которых являются величинами постоянными, то и крутящий момент двигателя в условиях установившегося режима работы будет постоянным. Следовательно, работа движущих сил на графике А – φ выразится прямой линией, проведенной из начала координат в точку N. Вернувшись к графику Tпc – φ, найдем значение движущего момента, постоянного в течение цикла, в масштабе μТ. И, наконец, найдем потребную мощность
![]() ,
,
по которой с учетом КПД механизма и привода можно подобрать по каталогу двигатель2.