

3.2. Методика составления дифференциальных уравнений
1. Установление физического закона протекания процессов.
Математическое выражение закона образует дифференциальное уравнение.
2. Выявление и анализ факторов для определения зависимостей переменных, входящих в исходное уравнение. Нахождение математических зависимостей, как правило, нелинейных функций.
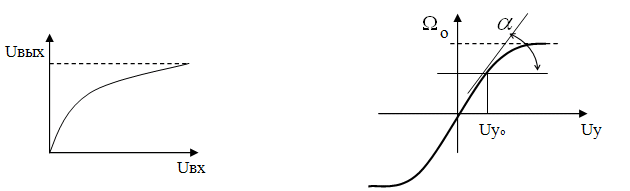
Рис. 24. Статическая характеристика Рис. 25. Характеристика холостого хода
усилителя постоянного тока двигателя постоянного тока
3. Линеаризация (если она допустима), упрощающая исследование процессов.
Признаки допустимости линеаризации следующиеи:
а) отсутствие разрывных, неоднородных и резко меняющихся функций;
б) правомерность уравнения для всего интервала регулирования
![]() (8)
(8)
Дифференциальные уравнения линеаризуют при помощи формулы Тейлора разложением нелинейных функций нескольких переменных по степеням их малых приращений в окрестности значений, соответствующих установившемуся режиму.
 где
xi=xi0+xi;
xi0=соnst;
Rn+1
– остаточный член.
где
xi=xi0+xi;
xi0=соnst;
Rn+1
– остаточный член.
Обычно ограничиваются членами первого порядка малости, пренебрегая Rn+1 , тогда
![]() (10)
(10)
и получаем дифференциальное уравнение в приращениях
 (11)
(11)
4. Преобразование дифференциальных уравнений к безразмерному виду. Переменные выражаются в относительных единицах, а коэффициенты безразмерны или имеют размерность времени в степени, соответствующей порядку производной величины к которой он относится.
Порядок преобразований следующий:
а) все члены уравнения делятся на некоторые постоянные значения переменной имеющей размерность членов уравнения;
б) переход к относительным единицам. Выбирают некоторое постоянное значение каждой переменной и определяют соотношения приращений и выбранных постоянных значений;
в) вводят обозначения относительных единиц и коэффициентов.
Рассмотрим линейные колебания подвижной массы при кинематическом возмущении.
Рис. 26. Подвижная масса при кинетическом возмущении
![]()
Условия кинетического воздействия:
(12)
![]()
![]() (13)
(13)
![]() (14)
(14)
где с – жесткость упругого элемента;
β – коэффициент сопротивления.
Введем новую переменную z=y/xст .
Выполнив
преобразование получим
![]() ,
(15)
,
(15)
где
![]() ;
;
![]() – постоянная
времени (период). (16)
– постоянная
времени (период). (16)
Имея линейные уравнения отдельных звеньев САР, путем последовательного исключения промежуточных переменных можно получить дифференциальное уравнение замкнутой системы в виде:
 (17)
(17)
где хвх(t) – входная величина; хвых(t) – выходная величина; F(t) – возмущающее воздействие;
ai;bj;ck – постоянные коэффициенты.
Левая часть уравнения равная нулю характеризует свойства системы, а правая часть – воздействие, поданное на вход САР, причем nm.
В теории автоматического регулирования для анализа уравнений движения широко используется преобразование Лапласа.
Если f(t)=0 при t<0 то преобразование Лапласа:
![]() (18)
(18)
и дифференциальное уравнение можно записать (при нулевых начальных условиях) в виде:
![]() (19)
(19)
Если ввести обозначения
 (20)
(20)
то дифференциальное уравнение примет вид
![]() (21)
(21)
Если f(t)=0, то
![]() (22)
(22)
называется передаточной функцией системы по отношению к управляющему воздействию.
Передаточная функция САР обладает следующими свойствами:
передаточная функция – дробно-радиальная функция вида
![]() (23)
(23)
и для реальной системы m > n:
2) коэффициенты an …ao ,bm …bo вещественны;
3) невещественные корни многочленов числителя и знаменателя могут быть только комплексно-сопряженными;
корни уравнений M(s) = 0 называются нулями, D(s) = 0 называются полюсами.
При замене оператора
s на частотный оператор
![]() получаем частотную передаточную функцию
получаем частотную передаточную функцию
![]() (24)
(24)