

1.4. Схема сар с одной регулируемой переменной
С хематически
САР с одной регулиремой переменной
показана на рис.5.
хематически
САР с одной регулиремой переменной
показана на рис.5.
Рис. 5. Схематическое представление САР с одной регулиремой переменной:
где 1 – устройство сравнения управляющего воздействия и регулируемой переменной; 2 – объект и регулятор; f(t) – возмущающее воздействие может быть приложено к любой точке САР; (t)=g(t)–x(t) – сигнал ошибки.
В силу инерционности объекта управления и регулятора передача управляющего воздействия g(t) на выход системы x(t) присходит с запаздыванием (рис.6), что приводит к ошибкам (t).
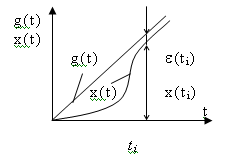

Рис. 6. Графики сигналов САР, где g(t) – входной сигнал
САР в основном используют элементы, обладающие свойством однонаправленности.
Такие элементы не оказывают влияние на предшествующие элементы, влияние оказывается только через ОС.
САР – замкнутая активная динамическая система направленного действия, преобразующая уставку на её входе в регулирующее воздействие, непосредственно прикладываемое к объекту управления.
Основные функциональные устройства САР показаны на рис. 7.

Рис. 7. Функциональная схема САР:
где u(t) - управляющий сигнал; v(t) - сигнал обратной связи; 1 – задающее устройство, u(t)=K*g(t); 2 – устройство преобразования физических величин; 3 – последовательное корректирующее устройство; 4 – усилитель мощности; 5 – исполнительное устройство; 6 – встречно-параллельное корректирующее устройство; 7 – чувствительный элемент; 8 – преобразующее устройство.
1.5. Классификация сар
I. по назначению различают следующие САР:
1) Системы автоматической стабилизации.

Рис. 8. Пример системы автоматической стабилизации
В них управляющее воздействие представляет собой постоянные величины (уставки). Основной задачей системы автоматической стабилизации является поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующих возмущений;
2) Системы программного регулирования.

Рис. 9. Пример системы программного регулирования
В них управляющим воздействием является известная функция времени (изменение по программе);
3) Следящие системы.

Рис. 10. Пример следящей системы
В них задающие воздействия представляют собой заранее неизвестную функцию времени, так как источником сигнала служит внешнее явление, закон изменения которого заранее известен.
II. По способу регулирования выделяют:
1) САР прямого и непрямого регулирования.
При прямом регулировании чувствительный элемент воздействует непосредственно на регулирующий орган; при непрямом чувствительный элемент воздействует на вспомогательное устройство, работающее от дополнительного источника энергии.
2) Одноконтурные и многоконтурные.
3) Несвязанного и связанного регулирования.
Несвязанные СУ предназначены для регулирования различных физических величин (могут взаимодействовать друг с другом только через общий объект регулирования).
В зависимых СУ изменение одной из регулируемых величин влияет на изменение остальных.
В связанных СУ регуляторы различных физических величин связанны друг с другом и могут взаимодействовать вне объекта регулирования.
|
Статические (прямого) |
Астатические (непрямого) |
|||
|---|---|---|---|---|---|
|
|
|
|||
|
2. Одноконтурные и многоконтурные. |
||||
Одноконтурные |
Многоконтурные |
||||
|
|
||||
3. Несвязанного и связанного регулирония. Многомерные |
|||||
Несвязанного регулирования |
Связанного регулирования |
||||
Независимые |
Зависимые |
Автономные |
|||
|
|
|
|||






Рис. 11. Виды САР