

15.5. Вычисление реакции дискретных сар по z-передаточной функции
Вычисление Y(k) можно произвести на основании формулы обратного Z-преобразования
![]() (225)
(225)
Контур интегрирования
r должен охватывать
все полюсы функции
![]() поэтому на основании теоремы вычетов
можно записать
поэтому на основании теоремы вычетов
можно записать
![]() в полюсах
У(z). (226)
в полюсах
У(z). (226)
На практике применяется более простой способ основанный на разложении
У(z)=G(z)Ф(z)
на простые дроби и использовании таблиц Z-преобразования слагаемых разложения.
Передаточная функция дискретной системы
 (227)
(227)
По таблице Z-преобразований находим:
У(k)=α1λ1k-1+ α2λ2k-1+… +αnλnk-1+z-1 {разложение G(z)}
В этом разложении
![]() характеризует переходный процесс, а
z-1{разложение
G(z)}
– денное движение.
характеризует переходный процесс, а
z-1{разложение
G(z)}
– денное движение.
Переходную
характеристику можно вычислить, если
положить
![]() .
.
15.6. Устойчивость дискретных сар
Если в Z-передаточной функции дискретной САР с ЭВМ в контуре управления заменить
W(z)=WВ(z)Z[WЭW0WОС]], то можно записать
![]() ,
при WО=1. (228)
,
при WО=1. (228)
Характеристическое уравнение имеет вид
1+W(z)=0. (229)
Корни уравнения (229) определяют устойчивость системы.
В плоскости комплексной переменной s для обеспечения устойчивости требуется, чтобы все корни характеристического уравнения находились в левой полуплоскости.
В плоскости
комплексной переменной
![]() cудить об устойчивости
можно, если отобразить левую полуплоскость
в соответствующую область плоскости
Z.
cудить об устойчивости
можно, если отобразить левую полуплоскость
в соответствующую область плоскости
Z.
Мнимой оси
![]() соответствует
соответствует
![]() , а это единичная окружность.
, а это единичная окружность.

Рис. 154. Единичная окружность
Комплексные корни
![]() соответствуют
соответствуют
![]()
Отрицательная
вещественная часть корня
![]() следовательно,
левая полуплоскость полуплоскости s
отображается во внутреннюю часть
единичной окружности.
следовательно,
левая полуплоскость полуплоскости s
отображается во внутреннюю часть
единичной окружности.
Таким образом, дискретная система устойчива, если все корни характеристического уравнения располагаются внутри единичной окружности.
Контрольные вопросы:
Чем дискретное преобразование Лапласа отличается от преобразования Лапласа непрерывного сигнала?
Каковы свойства Z-преобразования?
Каким образом определяется Z-передаточная функция дискретной системы?
Как выглядит мнимая ось при использовании Z-преобразования?
Когда дискретная САР устойчива? Объясните почему.
Лекция 16. Цифровое управление с помощью микро-эвм. Структуры автоматических мп-систем. Квантование по уровню. Аналоговый вход. Длина слова в мп-системе
16.1. Цифровое управление с помощью мп-систем.
Типовые схемы микропроцессорных систем управления показаны на рис. 155.

АЦП МП ЦАП
Рис. 155. Типовые схемы МП СУ
Цифрового регулирование имеет следующие преимущества:
высокая чувствительность, надежность, стабильность, помехоустойчивость, небольшие габариты, масса, низкая стоимость;
высокая гибкость по сравнению с аналогичными регуляторами (программирование в соответствии с требованиями или адаптация к характеристикам объекта без изменения аппаратных средств);
возможность работы в режиме с распределением времени.
Однако существуют некоторые ограничения по частоте квантования по времени, что снижает быстродействие, а также разрядности, а это снижает точность.
Контрольные вопросы:
Каковы отличия микропроцессорной системы от других систем?
Каково назначение АЦП?
Каково назначение ЦАП?
Какие задачи решает микропроцессор?
Каковы преимущества цифрового регулирования САУ?
Каковы недостатки цифрового регулирования САУ?
ЛЕКЦИЯ 17.
ШУМЫ КВАНТОВАНИЯ. АНАЛОГОВЫЙ ВЫХОД МП-СИСТЕМЫ. КВАНТОВАНИЕ ПО ВРЕМЕНИ. МП-СИСТЕМА КАК ОСНОВА НОВОГО ПОКОЛЕНИЯ САУ
17.1 Шумы квантования по уровню
Статические характеристики АЦП показаны на рис. 156 и 157.
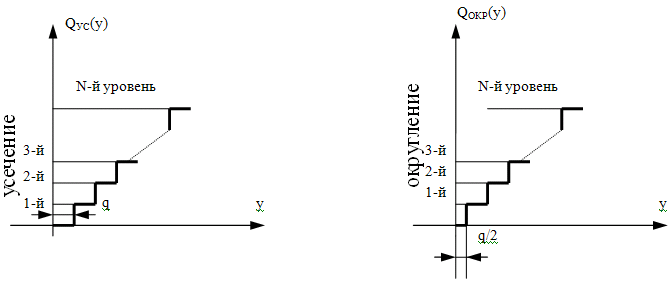
Рис. 156. Несимметричные АЦП
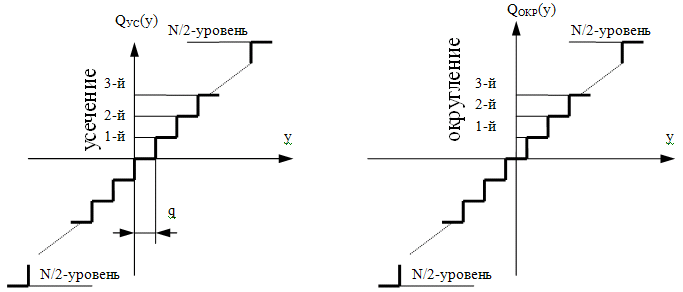
Рис. 157. Симметричные АЦП
Количество уровней и разрядность с АЦП связаны соотношением 2с=1+N.
Относительный шаг квантования
![]() (230)
(230)
Ошибка (шум) квантования
![]() (231)
(231)
![]() ,
где l=0,1,2. (232)
,
где l=0,1,2. (232)
Рис. 158. Рис. 159.
Разрядность АЦП
Количество
уровней несимметричных АЦП
![]() Следовательно q=2-c.
(233)
Следовательно q=2-c.
(233)
Для симметричных АЦП q=2-c+1
Полагая ymax=1; q=ymin., находим
C=log2ymax/ymin или C=1+log2ymax/ymin
Влияние шумов квантования на динамику САР можно оценить по дисперсии ошибки:
![]() (234)
(234)
Плотность распределения вероятности ошибок
![]() (235)
(235)
![]()
![]()
Рис. 160. Рис. 161.
Для
обоих случаев
![]()
Оценку влияния шума производят путем определения соотношения сигл/шум.
 ,
дБ, (236)
,
дБ, (236)
г де ý2 – дисперсия нормального гауссова сигнала (ymax=1, y=0.5, y2=1/9).
Для АЦП с симметричной характеристикой
![]() , (237)
, (237)
тогда
![]() (238)
(238)
Следовательно,
 . (239)
. (239)