

Основные (типовые) управляющие воздействия сау
При экспериментальном и теоретическом исследовании автоматических систем и их элементов используют ряд стандартных сигналов, называемых типовыми воздействиями. Эти воздействия описываются простыми математическими функциями и легко воспроизводятся при испытании систем.
Ступенчатое воздействие – это воздействие, которое мгновенно возрастает от нуля до некоторого значения и далее остается постоянным.
Ступенчатому воздействию соответствует функция
![]()
При анализе и расчете систем удобно использовать ступенчатое воздействие, у которого величина а0 = 1. Его называют единичным ступенчатым воздействием и обозначают 1(t).
Ступенчатое воздействие чаще всего используют при испытаниях и расчетах систем стабилизации, так как эти воздействия наиболее близки к реальным входным (задающим и возмущающим) воздействиям систем стабилизации.
Импульсное воздействие представляет собой одиночный импульс прямоугольной формы, имеющий достаточно большую высоту и весьма малую продолжительность (по сравнению с инерционностью испытываемой системы). Очевидно, что площадь такого импульса всегда равна а0.
При математическом анализе автоматических систем используют единичное импульсное воздействие, которое описывается так называемой дельта–функцией
![]()
причем
![]()
Согласно этим выражениям, дельта–функцию можно рассматривать как импульс, имеющий бесконечно большую высоту, бесконечно малую длительность и единичную площадь. Дельта–функцию можно определить также как производную единичного скачка:
![]() .
.
В качестве стандартного гармонического воздействия используют обычно сигнал синусоидальной формы, описываемый функцией
![]()
где А – амплитуда сигнала;
![]() -
круговая частота, рад/с;
-
круговая частота, рад/с;
Т – период сигнала, с.
Гармонические воздействия широко используются при исследовании точности и устойчивости как стабилизирующих, так следящих и программных автоматических систем. Это объясняется двумя обстоятельствами: во–первых, реальные возмущения часто имеют периодический характер и поэтому могут быть представлены в виде суммы гармонических составляющих; во–вторых, математический аппарат анализа автоматических систем хорошо разработан именно для случая гармонических воздействий.
Для следящих и программных систем типовым является линейное воздействие
![]() .
.
Коэффициент а1 характеризует скорость нарастания воздействия x(t).
Принцип суперпозиции для линейных систем
Для линейных систем справедлив принцип суперпозиции (наложения): реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности.
Это позволяет ограничиться изучением систем с одним входом.
Временные характеристики сау
Наиболее наглядное представление о динамических свойствах элемента дает его переходная функция (характеристика). Переходной функцией h(t) называют изменение выходной величины y(t) во времени, возникающее после подачи на вход единичного ступенчатого воздействия, при нулевых начальных условиях.

![]()
Переходная
функция может быть задана в виде графика
(тогда она называется характеристикой)
или в формульном виде.
Переходная
функция h(t),
как и любое решение неоднородного
дифференциального уравнения имеет 2
составляющие: вынужденную
![]() и свободную
и свободную![]() .Вынужденная
составляющая переходного
процесса представляет собой частное
решение исходного уравнения. При
ступенчатом воздействии вынужденная
составляющая равна установившемуся
значению выходной величины, которое
для статических элементов может быть
найдено непосредственно из дифференциального
уравнения (при нулевых производных):
.Вынужденная
составляющая переходного
процесса представляет собой частное
решение исходного уравнения. При
ступенчатом воздействии вынужденная
составляющая равна установившемуся
значению выходной величины, которое
для статических элементов может быть
найдено непосредственно из дифференциального
уравнения (при нулевых производных):
![]() .
.
Свободная составляющая может быть найдена как решение соответствующего однородного дифференциального уравнения в следующем виде (при отсутствии одинаковых корней):
![]() ,
,
где
![]() -
корни характеристического уравнения
-
корни характеристического уравнения
![]() -
постоянные интегрирования, зависящие
от начальных условий.
-
постоянные интегрирования, зависящие
от начальных условий.
Характеристическое уравнение, соответствующее определенному дифференциальному уравнению, представляет собой алгебраическое уравнение, степень и коэффициенты которого совпадают с порядком и коэффициентами левой части этого дифференциального уравнения. Для дифференциального уравнения
![]()
характеристическое уравнение имеет вид
![]()
где
![]() - некоторое комплексное число, являющееся
решением (корнем), характеристического
уравнения.
- некоторое комплексное число, являющееся
решением (корнем), характеристического
уравнения.
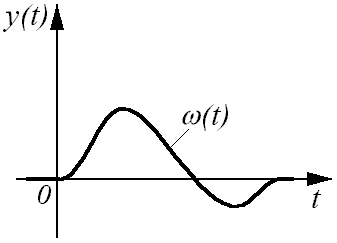
Импульсной переходной функцией (функцией веса) (t) называют изменение выходной величины y(t), возникающее после подачи на вход дельта–функции, при нулевых начальных условиях (см. рис.).
И
![]() ,
,
и наоборот, переходная функция равна интегралу от импульсной переходной:
![]()