

Методология математического описания сау
Система рассматривается как цепь взаимодействующих (физически и информационно) элементов, которая обладает способностью передавать физические воздействия и информационные сигналы в одном, строго определенном направлении.
Каждый конструктивный элемент рассматривается как преобразователь входного воздействия в выходную реакцию.
На основе априорных сведений о физической природе каждого элемента и закономерностях его функционирования составляется математическая модель, которая на языке соответствующей научной дисциплины отражает существенные для данной цепи взаимосвязи между входными и выходными переменными элемента.
При составлении математического описания всегда приходится прибегать к некоторой идеализации реальных процессов, определенным упрощениям, отбрасыванию второстепенных факторов. Удачность и допустимость этих упрощений зависят от глубины знаний исследователя системы в данной области физики и технологии, его инженерной интуиции и всегда подлежат экспериментальной проверке.
Классификация сау
Выделяют три крупные группы.
1. Классификация по характеру динамических процессов в системе
1.1. По виду сигналов, протекающих по контуру системы.
САУ бывают непрерывныеэто такие системы, в которых во всех звеньях непрерывному во времени входному сигналу соответствует непрерывный во времени выходной сигнал.
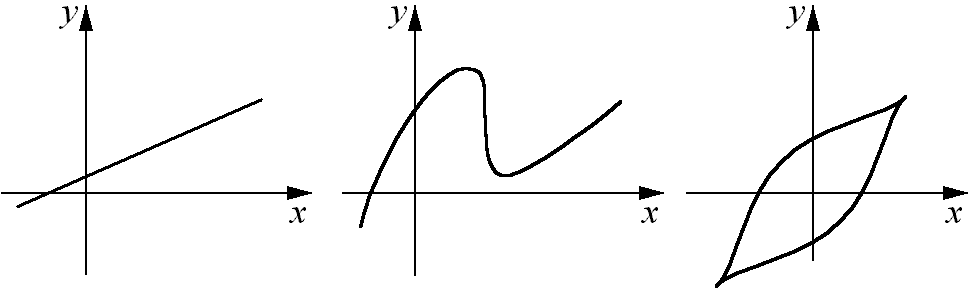
Для того чтобы система была непрерывная, необходимо наличие непрерывных статических характеристик системы.
дискретные САУ это такие системы, в которых хотя бы в одном звене непрерывному входному сигналу соответствует дискретный выходной сигнал (или импульс).
К дискретным системам, как разновидность, относятся цифровыеСАУ, в которых функции регулятора выполняет цифровое устройство, а выходная величина представляет собой цифры.
р
 елейные
САУ (системы релейного действия)
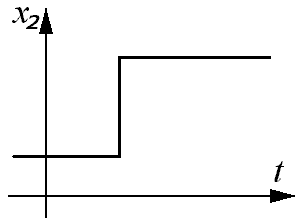
это системы, в которых хотя бы в одном
звене непрерывной входной величине
соответствует выходная величина,
изменяющаяся скачком.
елейные
САУ (системы релейного действия)
это системы, в которых хотя бы в одном
звене непрерывной входной величине
соответствует выходная величина,
изменяющаяся скачком.
Статическая характеристика релейных систем имеет точку разрыва.
1.2. По виду дифференциальных уравнений.
Линейные
А). Обыкновенные линейные системы (с сосредоточенными параметрами) – это такие системы, в которых в каждом из звеньев динамические процессы описываются обыкновенными линейными уравнениями. Статическая характеристика таких систем имеет линейный вид.

Б). Особые линейные системы, среди которых различают:
линейные САУ с распределенными (в пространстве) параметрами это такие САУ, динамика которых описывается частными производными, например, сушильные барабаны, флотомашины и другие установки, в которых процессы преобразования энергии и вещества происходят по всей длине аппарата.
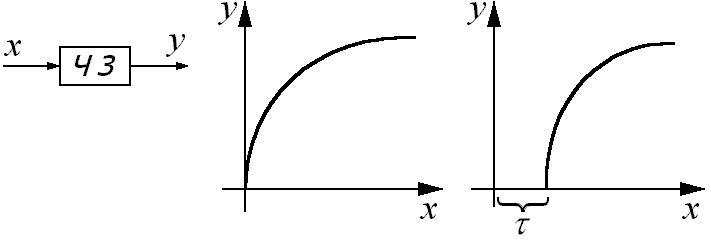
линейные системы с запаздыванием это такие САУ, в которых присутствует хотя бы одно звено чистого запаздывания (непрерывному входному сигналу соответствует непрерывный выходной сигнал, сдвинутый по времени на , где - время запаздывания).
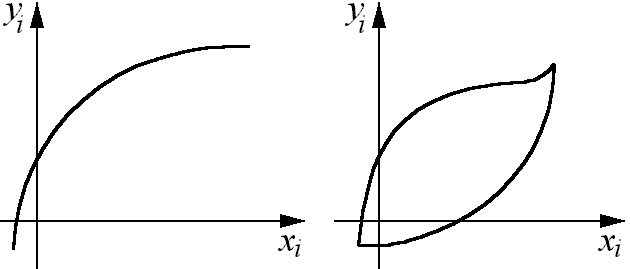
Нелинейные системы это такие САУ, в которых хотя бы одно звено описывается нелинейным уравнением или имеется нелинейность иного вида, такая как произведение двух переменных, квадратный корень, степень и др.
Среди нелинейных систем также выделяют особые нелинейные системы:
1. нелинейные системы с распределенными параметрами;
2. нелинейные системы с чистым запаздыванием;
К нелинейным системам относятся релейные системы.