

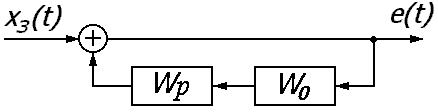
Рассмотрим передаточную функцию типовой одноконтурной системы
С

![]()
Часто при расчете систем передаточные функции и уравнение динамики записывают не для управляемой величины х, а для сигнала ошибки
![]() ,
,
который также может рассматриваться как сумма двух составляющих:
![]() ,
,
где ев, ез – составляющие сигнала ошибки, обусловленные изменениями соответственно возмущающего и задающего воздействий.
Для каждой составляющей сигнала ошибки можно записать передаточные функции, связывающие эти составляющие с соответствующими внешними воздействиями.
Передаточная функция системы по задающему воздействию равна
![]()
а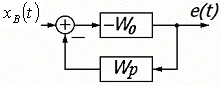 передаточная функция по возмущающему
воздействию
передаточная функция по возмущающему
воздействию
![]()
Уравнение динамики системы, записанное для сигнала ошибки, будет иметь вид
![]()
Рассмотрим
для примера следующий случай: пусть
![]() .
.
Тогда ошибка будет зависеть только от задающего воздействия
![]() .
.
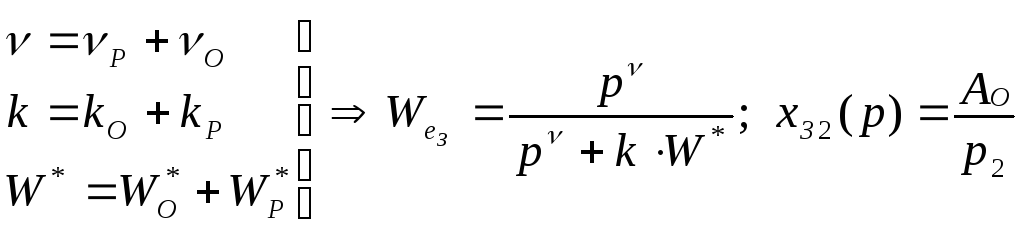
Пусть
для нашего случая
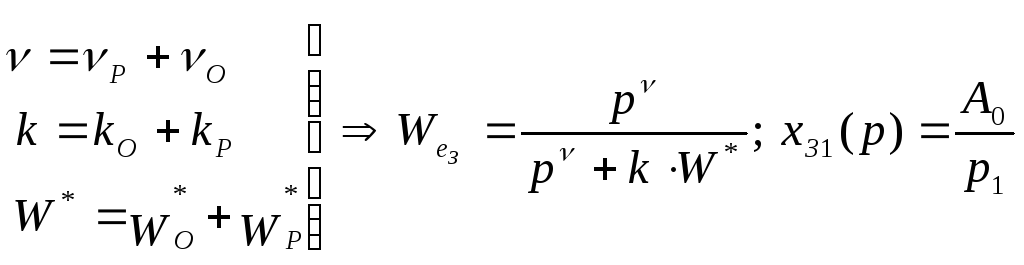
![]() ,
тогда
,
тогда

Здесь О является порядком астатизма у объекта, а Р – у регулятора, причем если О0 и Р0, то ошибка будет равна нулю.
Если регулятор или объект содержат интегрирующие звенья, то ошибка в установившемся режиме будет равна нулю, следовательно, система является астатической.
Статической будет та САУ, в которой ни регулятор, ни объект не будут содержать интегрирующих звеньев. Кроме того, статическая САУ – это САУ имеющая нулевой порядок астатизма.
Ошибки статических и астатических систем при типовых задающих воздействиях
Рассмотрим три типа задающих воздействий:
1


Зададим:
 .
.
Тогда
![]() .
.
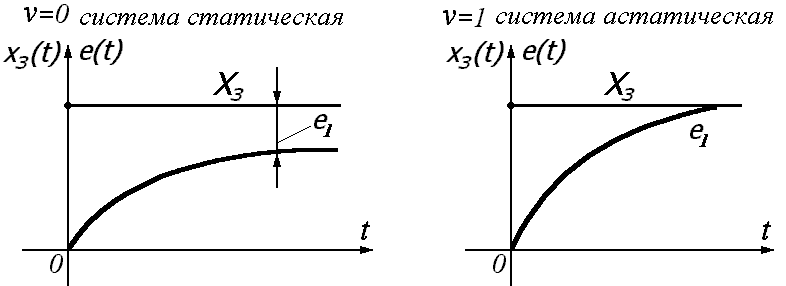
Это
означает, что, если =0,
то ошибка будет равна
![]() ,
следовательно, системастатическая,
а если =1,
то ошибка -
,
следовательно, системастатическая,
а если =1,
то ошибка -
![]() ,
значит данная система –астатическая.
Т.о. при порядке астатизма системы 1,
система при данном возмущающем воздействии
является астатической.
,
значит данная система –астатическая.
Т.о. при порядке астатизма системы 1,
система при данном возмущающем воздействии
является астатической.
2


Зададим:
 .
.
Тогда![]() .
.
Это
означает, что, если =0,
то ошибка будет равна
![]() ,
следовательно, система находится в
неопределенном состоянии; если=1,
то ошибка -
,
следовательно, система находится в
неопределенном состоянии; если=1,
то ошибка -
![]() ,
значит данная системастатическая;
а если =2,
то ошибка равна
,
значит данная системастатическая;
а если =2,
то ошибка равна
![]() ,
что говорит обастатичности
данной системы. Т.о. при линейном
изменяющемся задающем воздействии,
система будет статической при порядке
астатизма системы =1,
а при 2
– система является астатической.
,
что говорит обастатичности
данной системы. Т.о. при линейном
изменяющемся задающем воздействии,
система будет статической при порядке
астатизма системы =1,
а при 2
– система является астатической.
3

Тогда
 .
.
Это означает, что:
если =0, то ошибка будет равна
 ,
следовательно, система находится в
неопределенном состоянии;
,
следовательно, система находится в
неопределенном состоянии;если =1, то ошибка -
 ,
следовательно, система находится в
неопределенном состоянии;
,
следовательно, система находится в
неопределенном состоянии;если же =2, то ошибка равна
 ,
значит данная системастатическая;
,
значит данная системастатическая;если =3, то ошибка равна
 - в этом случае система является
астатической.
- в этом случае система является
астатической.
Т.о. система будет статической при порядке астатизма системы =2, а при 3 она является астатической.
Графики в этом случае аналогичны пункту 2.
Ошибка при возмущающем воздействии, не равном нулю

На ошибку, обусловленную возмущающим воздействием влияет только астатизм регулятора.
Таблица
-
Составляющие сигналов ошибки
Порядок астатизма
Виды возмущений
А01(t)
А0 t1(t)
А0t21(t)
e3
=0
А0/(1+k)
=1
0
А0/ k
=2
0
0
2 А0/ k
eB
0=0; p=0
А0 k 0/(1+ k)
0=0; p =1
0
А0/ kР
0=1; p =0
А0 k 0/ k
0=1; p =1
0
А0/ kР
0=2; p =2
0
0
2 А0/ kР
Выводы:
Составляющая ошибки, обусловленная задающим воздействием, зависит от порядка астатизма всей системы
Составляющая ошибки, обусловленная возмущающим воздействием, зависит от порядка астатизма регулятора.
Ошибка при задающем воздействии определяется по формуле: еЗ=А0q!/k , где хз= A0tq1(t) , q определим при q от 1 до n.
Ошибка при возмущающем воздействии обратно пропорциональна коэффициенту системы еВ=1/k.
Если q, то еЗ()=,еВ()=.
Если qР, то еЗ()=0,еВ()=0.
Если система работает на отслеживание ошибки, обусловленное задающим воздействием, то такая система называется системой стабилизации.
Если система работает на отслеживание ошибки, обусловленное возмущающим воздействием, то такая система называется следящей системой.
Чувствительность системы
До сих пор мы предполагали, что значение параметров объекта и устройства управления остаётся в процессе эксплуатации системы постоянными. Однако, в реальных промышленных условиях из-за ряда причин (изменение температуры, износ оборудования, старение изоляции) параметры системы постепенно изменяются, и их действительные значения всегда отличаются от расчетных.
Влияние вариаций параметров системы на статические и динамические свойства называются параметрическими возмущениями, а возникающие при этом отклонения характеристик системы от расчетных значений –параметрическими погрешностями (ошибками).
Чувствительностью системы называется изменение выходных характеристик или показателей качества в зависимости от изменения параметров системы. Если система не изменяет свои выходные характеристики или показатели качества при изменении параметров системы, то такая система называется грубая (робастная).
Количественной характеристикой чувствительности системы является функция чувствительности, которая определяется как частная производная какой-либо характеристики системы (передаточная, переходная характеристика, время переходного процесса и т.д.) по варьируемому параметру, например
![]() ,
,![]() - расчетное значение данного параметра.
- расчетное значение данного параметра.
Чаще всего на практике применяется относительная функция чувствительности:
![]()
![]() .
.
Чем меньше функция чувствительность (относительная функция чувствительности), тем грубее система и, следовательно, лучше качество управления.
В разомкнутой системе изменение параметров системы приводит к отклонению выходной величины от желаемого значения. Замкнутая система, наоборот, чувствует это отклонение и пытается его скорректировать. Поэтому чувствительность системы к изменению параметров – это вопрос первостепенной важности. Основное преимущество систем с ОС – в их способности уменьшать чувствительность к изменениям параметров.
Рассмотрим случай, когда за счёт изменения параметров объекта его передаточная функция приняла выражение
![]()
Если система разомкнутая, то выходная переменная (в виде изображения Лапласа) получит приращение:
![]()
В замкнутой системе:
![]() ,
отсюда
,
отсюда
![]()
Если
считать, что
![]() ,
то
,
то
![]()
Это
выражение показывает, что в замкнутой
системе изменение выходной переменной
уменьшается в
![]() раз.
раз.
Синтез линейных САУ