

Некоторые правила структурных преобразований
|
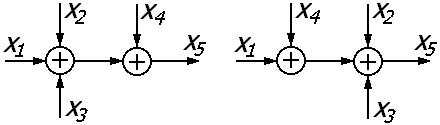
1 |
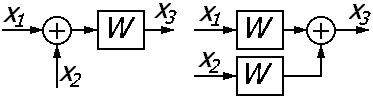
Перенос сумматоров |
|
|
2 |
Перестановка звеньев |
|
|
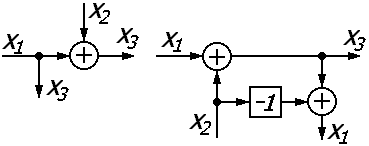
3 |
Перенос узла с выхода сумматора на вход |
|
|
4 |
Перенос узла с входа сумматора на выход |
|
|
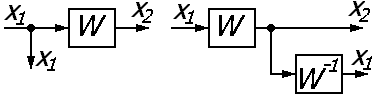
5 |
Перенос узла с выхода звена на вход |
|
|
6 |
Перенос узла со входа звена на выход |
|
|
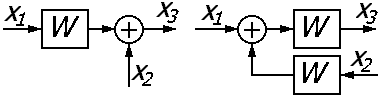
7 |
Перенос сумматора с выхода звена на вход |
|
|
8 |
Перенос сумматора со входа звена на выход |
|
|
9 |
Замена передаточных функций прямой и обратной цепи |
|
|
10 |
Приведение к единичной обратной связи |
|




Изображение структурных схем в виде графов
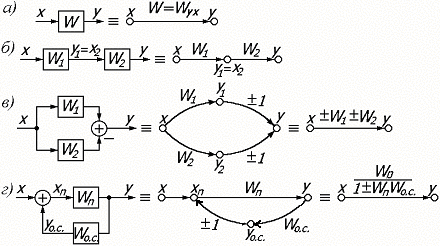
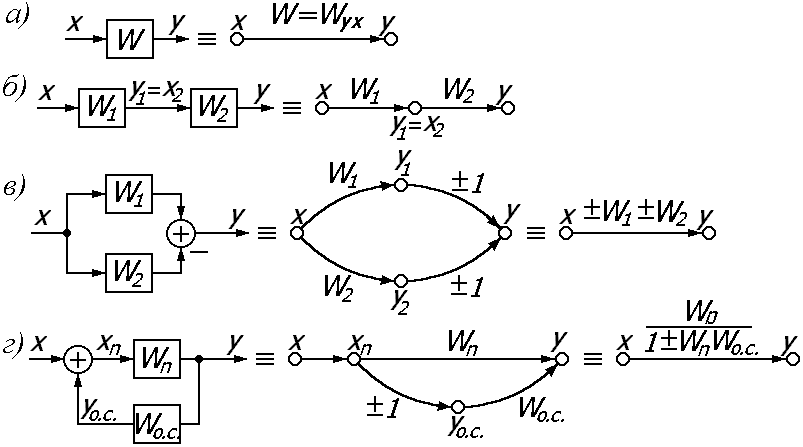
Информация о структуре системы и передаточных свойствах ее элементов может быть задана не только в виде обычной алгоритмической схемы, но и в виде сигнального графа.
Сигнальный граф системы управления представляет собой ориентированный граф – совокупность дуг, изображающих отдельные звенья и указывающих направление передачи сигнала, и вершин, соответствующих входным и выходным сигналам звеньев. Отдельному звену алгоритмической схемы, изображаемому прямоугольником, на сигнальном графе системы соответствует стрелка, соединяющая вершины х и у. Около стрелки указывается передаточная функция звена. Если к вершине подходят несколько дуг, то соответствующий ей сигнал равен сумме всех выходных сигналов этих дуг. Если из вершины исходят несколько дуг, то входные сигналы всех дуг одинаковы и равны сигналу данной вершины.
Знак, с которым сигнал вводится на алгоритмической схеме в сумматор, на сигнальном графе учитывается вместе с передаточной функцией дуги, вследствие чего сигналы всех дуг, подходящих к вершине, складываются со знаком плюс.
Д
![]() ,
,
где
![]() - передаточные функцииi-го
прямого канала (i-тый
прямой путь), связывающего вход
- передаточные функцииi-го
прямого канала (i-тый
прямой путь), связывающего вход
![]() с выходом
с выходом![]() ;m
– число таких каналов (путей);
;m
– число таких каналов (путей);
![]() - определитель графа, специальный
полином, который определённым образом
характеризует совокупность всех
замкнутых цепей системы, содержащих
обратные связи, и вычисляется как сумма
передаточных функций разомкнутых
контуров этих цепей и произведений
передаточных функций разомкнутых
контуров пар и троек несоприкасающихся
друг с другом цепей с обратными связями:
- определитель графа, специальный
полином, который определённым образом
характеризует совокупность всех
замкнутых цепей системы, содержащих
обратные связи, и вычисляется как сумма
передаточных функций разомкнутых
контуров этих цепей и произведений
передаточных функций разомкнутых
контуров пар и троек несоприкасающихся
друг с другом цепей с обратными связями:
![]()
Цепи (контура) не соприкасаются, если они не имеют общих вершин.
Полином
![]() составляется по аналогичному правилу,
но только для цепей с обратными связями,
не соприкасающихся сi-тым
прямым каналом.
составляется по аналогичному правилу,
но только для цепей с обратными связями,
не соприкасающихся сi-тым
прямым каналом.
Формула Мейсона особенно удобна для применения, когда структура системы представлена в виде сигнального графа.
Методика построения ЛАЧХ последовательного соединения звеньев
Передаточная функция разомкнутой одноконтурной системы должна быть приведена к стандартному виду:
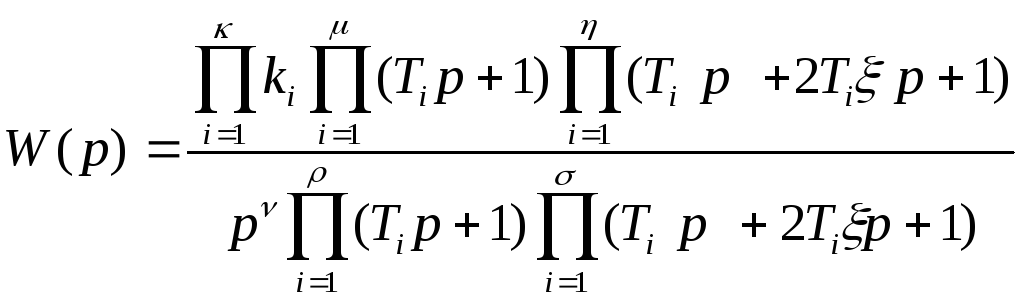
и представлять из себя последовательное соединение следующих типовых звеньев:
Пропорциональных (
 );
);идеальных интегрирующих (
 );
);идеальных дифференцирующих (
 );
);апериодических (
 );
);форсирующих (
 );
);колебательных (
 ,
,
 ),
),форсирующих 2 порядка (
 ,
,
 ).
).
Определяются сопрягающие частоты
 и отмечаются вдоль оси частот.
и отмечаются вдоль оси частот.Определяется величина
 ,
где
,
где - передаточный коэффициент всей системы.
- передаточный коэффициент всей системы.Определяется наклон начального участка =
 дБ/дек,
где
дБ/дек,
где - степень астатизма системы (
- степень астатизма системы ( - количество идеальных интегрирующих
звеньев,
- количество идеальных интегрирующих
звеньев, -
количество идеальных дифференцирующих
звеньев).
-
количество идеальных дифференцирующих
звеньев).Строится первая асимптота до первой сопрягающей частоты через точку с координатами

 (с начальным наклоном =
(с начальным наклоном = дБ/дек).
дБ/дек).Следующая асимптота строится от первой до второй сопрягающей частоты. Наклон второй асимптоты меняется относительно предыдущего участка в зависимости от звена, к которому относится первая сопрягающая частота. Изменение наклона равно:
а) – 20 дБ/дек, если сопрягающая частота принадлежит апериодическому звену;
б) + 20 дБ/дек, если сопрягающая частота принадлежит форсирующему звену;
в) – 40 дБ/дек, если сопрягающая частота принадлежит колебательному звену;
г) + 40 дБ/дек, если сопрягающая частота принадлежит форсирующему звену 2 порядка.
Остальные асимптоты строятся аналогично. Если имеется g одинаковых звеньев, то наклон изменяется в g раз.
(Для проверки): На высоких частотах наклон логарифмической характеристики = – 20(r-s) дБ/дек, где r – порядок знаменателя, s- порядок числителя передаточной функции
 .
.