

Критерий Михайлова Рассмотрим характеристическое уравнение системы
![]()
![]()
p=j - придаем чисто мнимое значение.
Для того чтобы система была устойчивой, необходимо, чтобы суммарный угол поворота векторов р-рi составлял угол n.
В характеристическом уравнении заменяем р на j. Тогда получим функцию комплексного переменного:
![]()
которую можно так же, как амплитудно-фазовую характеристику, представить в виде суммы действительной и мнимой частей:
![]()
Действительная часть Re() содержит только четные степени переменного :
![]()
а мнимая часть Im()— только нечетные:
![]()
Действительная часть характеристического уравнения является функцией четной, а мнимая часть – нечетной.
![]()
Поэтому достаточно ограничиться построением кривой, соответствующей характеристическому полиному для положительных частот. Тогда кривая, соответствующая отрицательным частотам является зеркальным отражением кривой для положительных частот относительно оси абсцисс.
Каждому фиксированному значению переменного соответствует комплексное число, которое можно изобразить в виде вектора на комплексной плоскости. Если теперь изменять параметр от 0 до , то конец вектора D(j) опишет некоторую линию, которая называется характеристической кривой или годографом Михайлова. По виду этой кривой можно судить об устойчивости системы.
Формулировка критерия Михайлова
Автоматическая
система управления, описываемая
уравнением п-го порядка будет устойчивой,
если при изменении частоты от 0 до
характеристический вектор системы
(годограф Михайлова) повернется против
часовой стрелки на угол
![]() ,
не обращаясь при этом в нуль.
,
не обращаясь при этом в нуль.
Э![]() то
означает, что характеристическая кривая
устойчивой системы должна при изменении
от 0 до
пройти последовательно через n квадрантов.
Кривая D(j)
для устойчивой системы всегда начинается
в точке на действительной оси, удаленной
от начала координат на величину
то
означает, что характеристическая кривая
устойчивой системы должна при изменении
от 0 до
пройти последовательно через n квадрантов.
Кривая D(j)
для устойчивой системы всегда начинается
в точке на действительной оси, удаленной
от начала координат на величину ![]() .
.

На рисунке а) изображен вектор D(j), называемый характеристической кривой или годографом Михайлова. Характеристические кривые, соответствующие устойчивым системам (рисунок б)), имеют плавную спиралеобразную форму и уходят в бесконечность в том квадранте, номер которого равен порядку уравнения. Если характеристическая кривая проходит п квадрантов не последовательно или проходит меньшее число квадрантов, то система неустойчива (рисунок в)).
В практических расчетах удобно применять следствие из критерия Михайлова:
Система устойчива, если действительная и мнимая части характеристической функции D(j) обращаются в нуль поочередно (см. рисунок г)), т.е. если корни уравнений Re()=0 и Im()=0 перемежаются и Re(0) 0 и Im(0) 0.
Следствие из критерия Михайлова позволяет установить устойчивость системы невысокого порядка аналитически, без построения годографа.
Критерий Найквиста
Критерий Найквиста был сформулирован в 1932 г. американским физиком X. Найквистом. В отличие от критериев Гурвица, Рауса и Михайлова, которые основаны на анализе характеристического уравнения системы, критерий Найквиста позволяет судить об устойчивости замкнутойсистемы по амплитудно-фазовой характеристикеразомкнутогоконтура системы.
В этом заключается существенное преимущество критерия, т.к. построение АФХ разомкнутого контура для большинства реальных систем оказывается проще, чем построение годографа Михайлова. Особенно упрощается это построение для одноконтурных систем, состоящих из типовых звеньев.
Имеется САУ:
![]()
здесь Dp(j) – частотное характеристическое уравнение разомкнутой системы.
Найквист в своем критерии рассматривает вспомогательную функцию, определяемую по формуле
![]()
Примечание: Возьмем абстрактное комплексное число
![]() .
.
Модуль этого числа будет равен произведению модулей каждого из множителей, а аргумент этого числа – сумме каждого из слагаемых.
![]()
Причем
![]() .
.
Рассмотрим два случая.
1. Система в разомкнутом состоянии устойчива, это значит по Михайлову:
![]() ,
,
где п – порядок разомкнутой системы.
Частотное
характеристическое уравнение замкнутой
системы также имеет порядок п,
т.к. порядок числителя разомкнутой
системы всегда меньше или равен порядку
знаменателя разомкнутой системы (![]() ).
).
Если система в замкнутом состоянии тоже устойчива, то угол одинаковый
![]() .
.
Рассмотрим
изменения аргумента
![]() при изменении частоты от 0 до:
при изменении частоты от 0 до:
![]()
Система
в замкнутом состоянии будет устойчива,
если изменение аргумента функции
![]() при изменении частоты от 0 до
составит ноль. Это возможно только в
том случае, когда годограф не охватывает
точку начала координат (рис, а). Но если
рассматривать годограф функции
при изменении частоты от 0 до
составит ноль. Это возможно только в
том случае, когда годограф не охватывает
точку начала координат (рис, а). Но если
рассматривать годограф функции
![]() ,
то этому соответствует случай, когда
не охватывается точка (-1; ј0) (рис б).
,
то этому соответствует случай, когда
не охватывается точка (-1; ј0) (рис б).

Критерий Найквиста для первого случая: замкнутая система будет устойчивой, если годограф разомкнутой системы не пересекает отрезок (-;-1], т.е. не охватывает критическую точку (-1;0).
Употребленное в формулировке критерия Найквиста понятие охвата точки имеет некоторую неопределенность, из-за чего в случаях сложной формы кривой W(јω) могут возникнуть затруднения в суждении об устойчивости системы. Поэтому для суждения об устойчивости систем, имеющих АФЧХ сложной конфигурации, когда кривая АФЧХ пересекает действительную ось левее точки с координатами (-1; ј0) несколько раз, можно также использовать правило переходов, сформулированное советским ученым Я. 3. Цыпкиным: АФЧХ не охватывает точку (-1; ј0), если при возрастании w разность между числом положительных (сверху вниз) и отрицательных (снизу вверх) переходов АФЧХ через ось абсцисс слева от точки (-1; ј 0) равна нулю.
Н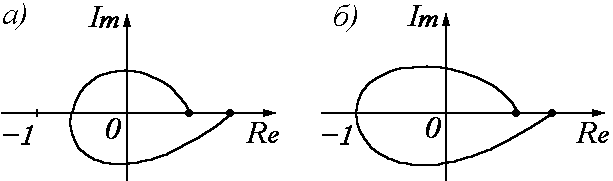 а
рисунке а) изображен годограф системы,
устойчивой в замкнутом состоянии, а на
б) – системы, находящейся на границе
устойчивости.
а
рисунке а) изображен годограф системы,
устойчивой в замкнутом состоянии, а на
б) – системы, находящейся на границе
устойчивости.
Система находится на границе устойчивости, если годограф, соответствующий амплитудно-фазовой характеристики разомкнутой системы хотя бы один раз пересечет точку [-1;0].
2. Разомкнутая система неустойчива.
Разомкнутая система неустойчива, это значит, что изменение аргумента представляется формулой:
![]() ,
,
где m – количество корней характеристического уравнения разомкнутой системы, находящихся в правой полуплоскости.