

Структурные схемы
Упрощенное графическое изображение любой структуры автоматической системы, содержащее условное изображение ее частей, наз. структурной схемой.
Их делят на функциональные и алгоритмические.
Функциональные и алгоритмические схемы состоят из условных изображений элементов (звеньев) (обычно в виде прямоугольников) и различных связей, изображаемых в виде линий со стрелками, показывающих направление передачи воздействия. Каждая линия соответствует обычно одному сигналу или одному воздействию. Иногда применяют жирные или сдвоенные линии: в функциональных – для обозначения материальных и энергетических потоков, в алгоритмических - для обозначения векторных величин. Около каждой линии указывают физическую величину, характеризующую данное воздействие.
Обычно вначале составляют функциональную схему системы, а затем – алгоритмическую.
Структурные схемы могут быть составлены с большей или меньшей степенью детализации. Схемы, на которых показаны лишь главные или укрупненные части системы, наз. обобщенными.
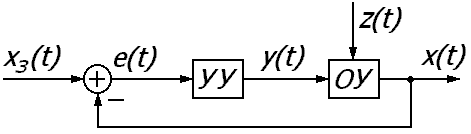
Пример типовой функциональной схемы сау
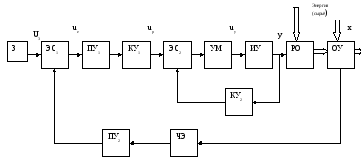
Структура САУ:
З Задающее устройство, которое преобразует входной сигнал U(t) в сигнал, удобный для дальнейшего использования;
ЭС1 сравнивающее устройство, вырабатывает сигнал ошибки (отклонения) как разность задающего сигнала и управляемой величины;
ПУ1 преобразующее устройство, преобразует сигнал ошибки в другую форму, удобную для дальнейшего использования, при этом не выполняются функции усиления и коррекции (пример: электрическаямеханическая);
КУ корректирующие устройства, улучшают динамические свойства регулирования и повышают устойчивость. В зависимости от включения бывают параллельными или последовательными. КУ1 последовательная коррекция, КУ2 параллельная коррекция.
ЭС2 сравнивающее устройство местной обратной связи;
УМ усилительное устройство, усиливает мощность сигнала;
ИУ исполнительное устройство, вырабатывает управляющее воздействие, обычно двигатель, электромагнит.
ЧЭ чувствительный элемент, фиксирует (измеряет) управляемую величину x(t);
ПУ элемент главной обратной связи, преобразует управляемую величину y(t) в вид, удобный для сравнения с задающим сигналом;
РО регулирующий орган, обычно заслонка, дозатор, передаёт управляющее воздействие непосредственно на объект.
ОУ объект управления.
Реальная САУ может не содержать некоторые из рассматриваемых пронумерованных блоков. Некоторые блоки могут объединяться. То, что называли блоками, носит название звеньев. И регулятор, и ОУ могут состоять из нескольких звеньев.
На функциональных схемах конкретных систем указывают не общее назначение блоков, а их конкретное наименование, например, двигатель (Д), тиристорный преобразователь (ТП), весоизмеритель (В) и т.д.
Алгоритмическая схема:
X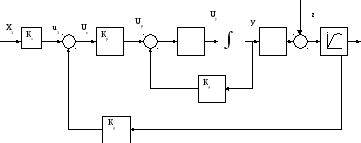
Каждому элементу функциональной структуры может соответствовать определенное алгоритмическое звено. В общем случае такое совпадение необязательно.
Детектирующие свойства элементов систем
Процессы преобразования и перераспределения энергии в автоматической системе, в отличие от многих других физических систем, строго ориентированы, т.е. энергия и воздействия передаются только в определенном направлении.
Направленность передачи воздействий в автоматической системе обеспечивается благодаря наличию у одного или нескольких конструктивных элементов системы так называемого детектирующего свойства. Это свойство заключается в том, что рассматриваемый элемент не оказывает обратного действия на предыдущий элемент, а его выходная величина не влияет на свою входную.
Обычно свойством однонаправленности обладают те элементы САУ, которые передают информационные воздействия. К таким элементам относятся в первую очередь измерители и преобразователи сигналов. Конструктивные части системы, через которые передаются энергетические воздействия, этим свойством, как правило, не обладают.
Только вследствие наличия элементов направленного действия в автоматической системе создаётся замкнутый контур передачи воздействий, при помощи которого и осуществляется целенаправленный процесс управления. Без таких элементов САУ были бы неработоспособны или малоэффективны.