

Алгоритм построения сау с последовательными корректирующими звеньями
Задаемся желаемой логарифмической характеристикой.
Определяем ЛАЧХ объекта.
Получаем ЛАЧХ корректирующего звена, как разницу между ЛАЧХ желаемой и ЛАЧХ объекта.
Аппроксимируем ЛАЧХ дробно-рациональной функцией или полиномом.
По специальным таблицам получаем схему корректирующего звена (как правило, это RC - цепи).
Синтез сау с параллельными корректирующими устройствами
К
Рассмотрим
![]() ,
или в частотном виде
,
или в частотном виде
![]()
и тогда разомкнутую систему можно упростить за счет приведенных допущений
![]() .
.
Если построить ЛАЧХ, то получим
![]() .
.
Считая,
что
![]() - желаемая ЛАЧХ, получим для корректирующего
звена:
- желаемая ЛАЧХ, получим для корректирующего
звена:
![]() .
.
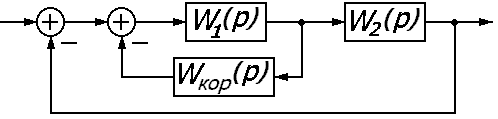
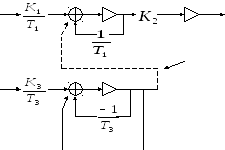
Иногда на практике возникает необходимость построения САУ комбинированной с последовательными и параллельными корректирующими звеньями.
Структурная схема такой САУ:
![]()

Считаем, что единицей в знаменателе можно пренебречь, тогда
![]()

В результате синтеза мы получаем суммарную ЛАЧХ последовательного и параллельного корректирующего звена. Для разбиения этой ЛАЧХ на последовательные и параллельные дополнительные части проводятся дополнительные исследования.
Модальный регулятор.
Является методом корневого синтеза, а именно, по желаемому расположению корней характеристического уравнения на комплексной плоскости строится модальный регулятор, который представляет собой коэффициенты отрицательной обратной связи по каждой динамической переменной.
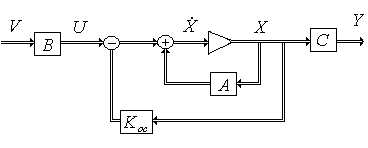
Дано описание объекта:
![]()
Задаёмся видом желаемого полинома Dжел(p) – в соответствии с заданными (желаемыми) показателями качества.
Введём обратную связь, вида:

где
![]() - характеристическое уравнение системы
с регулятором.
- характеристическое уравнение системы
с регулятором.
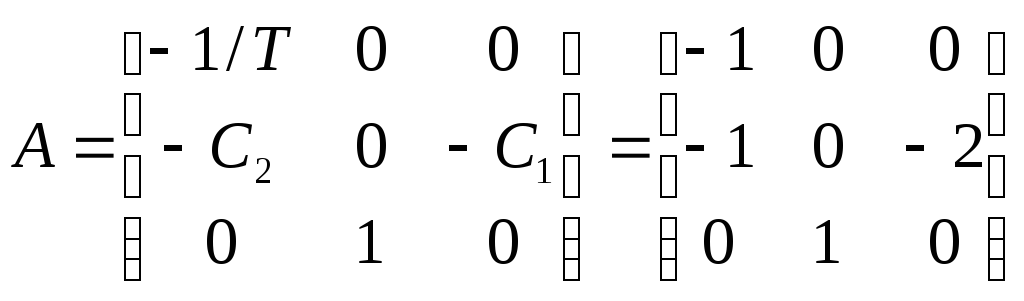
Пример: Дана система уравнений
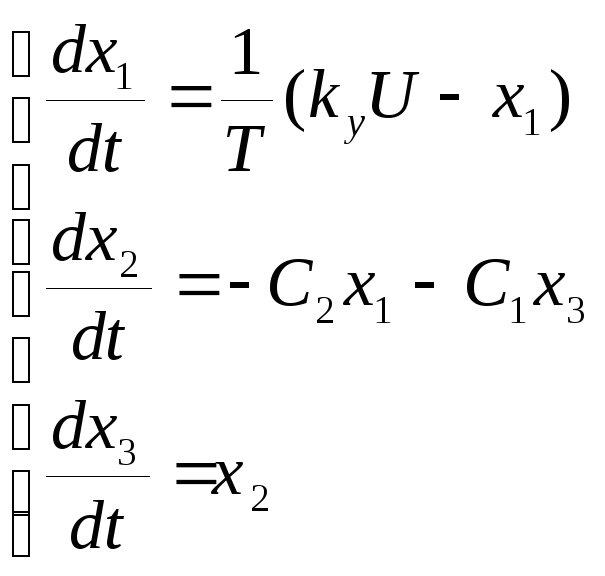

n1 U x1x2x3
Нужно рассмотреть матрицу управляемости:
![]()
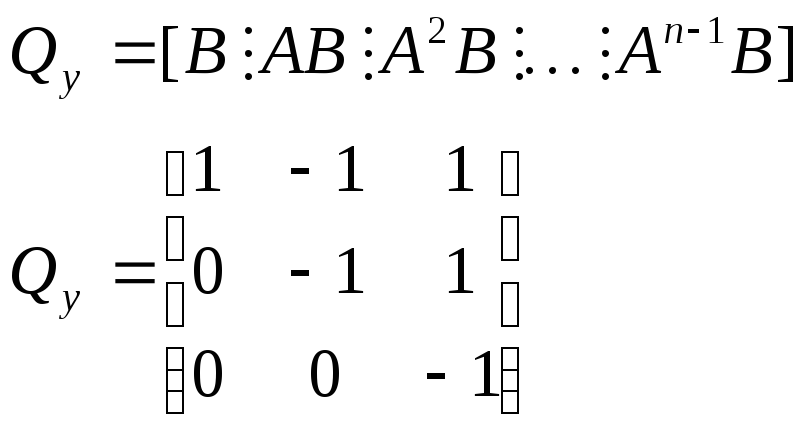 Система управляема,
так как ранг равен порядку системы
Система управляема,
так как ранг равен порядку системы
Выбираем желаемый полином той же степени, что и система:
Dжел(p)=(p+w0)3=p3+3p2w0+3pw0+w03


![]() - оценка качества,
где
- оценка качества,
где
![]() - время переходного процесса
- время переходного процесса
При выбранном значении
![]() получаем:
получаем:
Koc1 = 2; Koc2 = -1; Koc3 =5;
Управляемость и наблюдаемость.
Система называется управляемой, если, изменяя любой из входных сигналов можно добиться желаемого значения на выходе системы за конечное время.
y1
r1
без нее система будет неуправляемой, а с ней -
управляемой.
Критерий управляемости.
Для того, чтобы система была управляемая необходимо и достаточно, чтобы ранг матрицы управляемости был равен n (порядок объекта).
![]()
В
общем случае матрица управляемости
является прямоугольной. Если система
имеет один вход, то матрица имеет
размерность
![]() .
.
Наблюдаемость.
Система называется наблюдаемой, если по выходным сигналам Y можно восстановить переменные состояния X.
Наблюдаемость, в отличие от измеряемости предполагает не только измерение переменных состояний X, а также вычисления не измеряемых переменных X по измеренным.
Измеряемость – это случай, когда непосредственно можно замерить любую переменную.
Критерий наблюдаемости.
Для того, чтобы система была наблюдаема необходимо и достаточно, чтобы ранг матрицы наблюдаемости был равен n (порядок объекта).
![]()
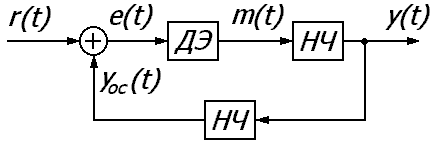
Дискретные системы автоматического управления
В дискретной системе управления один или несколько сигналов являются дискретными и представляют собой последовательность кратковременных импульсов. Обобщенная структурная схема дискретной САУ выглядит следующим образом:
З
Типы дискретизации (квантования) сигналов
В состав дискретной системы наряду со звеньями непрерывного действия входят элементы, преобразующие непрерывные сигналы в дискретные, и элементы, выполняющие обратное преобразование. Преобразование непрерывного сигнала в дискретный называется квантованием. Различают три вида квантования сигналов: по уровню; по времени; по уровню и времени (совместно).
1
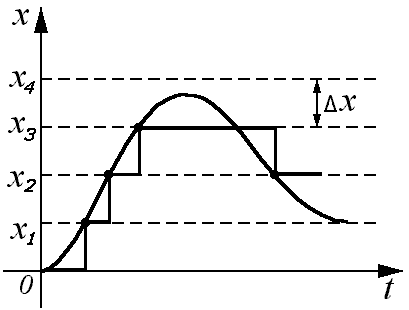
Системы автоматического управления, содержащие дискретный элемент, осуществляющий квантование по уровню, называются релейными системами, т.к. квантование по уровню производится специальными элементами – квантователями, простейшими из которых являются двух- и трехпозиционные реле. Они квантуют непрерывный сигнал соответственно по двум и трем уровням.
2
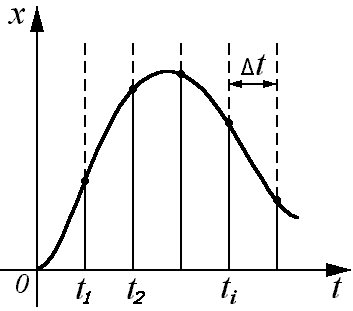
Квантование по времени осуществляется с помощью импульсного элемента. Импульсный элемент преобразует непрерывный входной сигнал в последовательность импульсов, амплитуда, длительность или период повторения которых зависят от значений входного сигнала в дискретные моменты времени. САУ, содержащие дискретный элемент, осуществляющий квантование по времени, называют дискретными (импульсными) САУ.
3. При совместном квантовании по времени и по уровню фиксируются дискретные по уровню значения, ближайшие к значениям непрерывного сигнала в дискретные моменты времени, причем приоритетным является квантование по времени.
Замена может осуществляться одним из четырех способов:
ближайшее нижнее;
ближайшее верхнее;
среднее значение;
ближайшее.
Сделаем замену по первому способу:
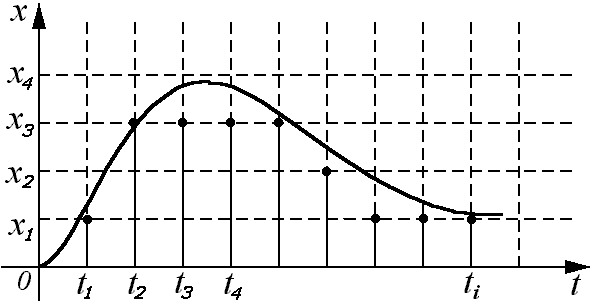
Дискретные системы, содержащие дискретный элемент, осуществляющий квантование по времени и по уровню, называются цифровыми системами автоматического управления.