

Анализ качества сау
Качество автоматической системы управления определяется совокупностью свойств, обеспечивающих эффективное функционирование как самого объекта управления, так и управляющего устройства, т.е. всей системы управления в целом.
Свойства, составляющие эту совокупность и имеющие количественные измерители, называются показателями качества системы управления.
Качество автоматической системы, как и любого технического устройчства, может быть оценено такими общепринятыми показателями, как вес системы, её габариты, стоимость, надёжность, долговечность и т.п. Совокупность этих общетехнических показателей характеризует качество СУ в широком смысле.
В ТАУ и в практике автоматизации термины “качество системы”, “качество управления” используют, как правило, в более узком смысле: рассматривают только статические и динамические свойства системы. Эти свойства предопределяют точность поддержания управляемой величины (выходной величины объекта) на заданном уровне в установившихся и переходных режимах, т.е. обеспечивают эффективность процесса управления. Для такого, более узкого понятия качества САУ, охватывающего только её статические и динамические свойства, применяют термин “качество управления”, а сами свойства системы, выраженные в количественной форме, называют показателями качества управления.
Для анализа качества управления могут быть использованы прямые и косвенные методы оценки. Прямые методы определения качества базируются на исследовании переходного процесса, дают наиболее достоверную информацию с последующим определением показаний качества. Косвенные методы определения качества позволяют по косвенным признакам, не решая ни дифференциальных, ни характеристических уравнений, получить приближенный переходный процесс с приближенными показателями качества. К особой категории показателей качества относятся интегральные оценки, которые вычисляют либо непосредственно по переходной функции системы, либо по коэффициентам передаточной функции системы.
Основные (прямые) показатели качества сау
Качество САУ определяется следующими показателями:
Время достижения установившегося режима,
время
переходного процесса, время регулирования
–
![]() - такое время, по истечении которого для
управляемой величины выполняется
условие:
- такое время, по истечении которого для
управляемой величины выполняется
условие:
![]()
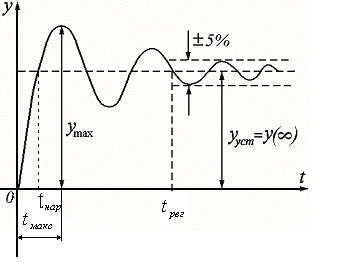
где у – управляемая величина; р – некоторая величина (для САУ 5% от установившегося режима).
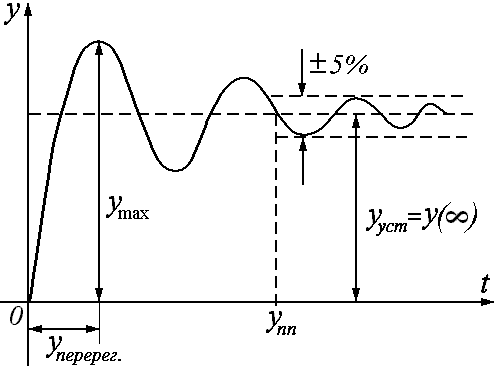
Перерегулирование - это процентное соотношение разницы максимального перерегулирования и установившегося значения:
![]() .
.
Время достижения первого максимума (tмакс), такое время, при котором выходная величина достигает своего максимального по модулю значения:
![]() .
.
Время нарастания – tнар
Число перерегулирований – это количество раз, когда управляемая величина превышает по модулю значение:
![]() .
.
Частота колебаний
![]() ,
где Т – период колебаний
,
где Т – период колебаний
Ошибка в установившемся режиме (характеризует точность САУ)
![]() .
.
Помимо
этих показателей, могут рассматриваться
ещё некоторые другие, например, в качестве
показателя может быть взята величина
![]() ,
или рассчитана величина декремента
затухания
,
или рассчитана величина декремента
затухания![]() и т.д.
и т.д.
Первые показатели – это показатели качества переходного процесса, а последний – показатель качества в установившемся режиме