1.3. По условиям функционирования.
Стационарные - т.е. параметры не изменяются в течение времени.
Нестационарные.
2. Классификация по характеристикам управления
2.1. По принципу управления.
а). САУ с разомкнутой цепью воздействий. Разомкнутые системы можно разделить в свою очередь на два класса: системы, осуществляющие управление в соответствии с изменением только задающего воздействия и системы, управляющие при изменении возмущения.
А![]() лгоритм
управления разомкнутой системы первого
типа имеет вид:
лгоритм
управления разомкнутой системы первого
типа имеет вид:
![]()
Чаще всего оператор Ау устанавливает пропорциональную связь между задающим воздействием хз(t) и управляющим воздействием y(t), а сама система в этом случае осуществляет программное управление.
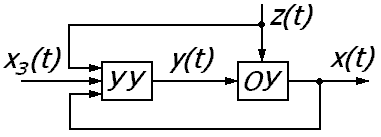
С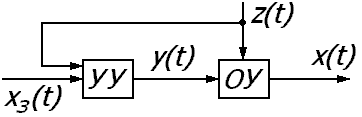 истема
управления по возмущению
– это такая система, в которой для
уменьшения отклонения управляемой
величины от заданной измеряется
возмущающее воздействие, обрабатывается
по определенному алгоритму и накладывается
на прежний управляющий сигнал.
истема
управления по возмущению
– это такая система, в которой для
уменьшения отклонения управляемой
величины от заданной измеряется
возмущающее воздействие, обрабатывается
по определенному алгоритму и накладывается
на прежний управляющий сигнал.
В системах управления по возмущению управляющее воздействие зависит от возмущающего и задающего воздействий:
![]()
причем в большинстве случаев оператор Ау может быть разделен на две не зависящие друг от друга составляющие:
![]()
Оператор Аз соответствует, как правило, простому пропорциональному преобразованию сигнала хз(t), а оператор Ав может быть и более сложным, например, устанавливающим нелинейное соотношение между сигналами ув(t) и z(t).
В большинстве случаев разомкнутые системы управления по возмущению выполняют функции стабилизации управляемой величины.
Преимущество разомкнутых систем управления по возмущению – их быстродействие: они компенсируют влияние возмущения еще до того, как оно появится на выходе объекта. Но применимы эти системы лишь в том случае, если на управляемую величину действует одно или два возмущения и есть возможность измерения этих возмущений.
б
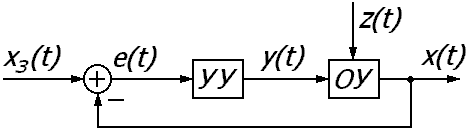 ).
САУ с
замкнутой цепью воздействий.
Система управления по отклонению.
).
САУ с
замкнутой цепью воздействий.
Система управления по отклонению.
Управляющее воздействие в замкнутой системе формируется в большинстве случаев в зависимости от величины и знака отклонения истинного значения управляемой величины от ее заданного значения:
![]()
где
![]() -сигнал
ошибки
(называемый также сигналом рассогласования).
-сигнал
ошибки
(называемый также сигналом рассогласования).
В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющих воздействий учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем.
Но вначале возмущение должно проявиться на выходе, система «почувствует» отклонение и лишь потом выработает управляющие воздействия, направленные на устранение отклонения. Несмотря на наличие определенных недостатков, этот принцип широко применяют при создании автоматических систем.
Во всех замкнутых системах существуют обратные связи, которые подразделяются на жесткие обратные связи и гибкие обратные связи. Жесткие обратные связи – это такие связи, в которых обратный сигнал существует как в динамическом, так и в статическом режиме. Гибкие обратные связи – связи, в которых сигнал обратной связи существует только в динамическом режиме.
В). В комбинированных системахсоздают две цепи воздействий – по заданию и по возмущению, и управляющее воздействие формируется согласно оператору
![]()
Эффективность работы комбинированной системы управления всегда больше, чем у порознь функционирующих замкнутой или разомкнутой систем.