

|
|
|
|
|
|
|
|
|
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ | ||
|
|
(Курс лекций) |
|
|
|
|
|
|
|
|
|
Содержание
1. Математическое моделирование систем управления 3
1.1. Основные понятия 3
1.2. Математическое описание динамики САР 9
1.3. Аналитическое построение математической модели 11
1.4. Задачи проектирования многомерных систем управления 13
1.5. Преобразование Лапласа. Понятие передаточной функции 13
1.6. Типовые воздействия 15
1.7. Типовые звенья обыкновенных линейных систем 17
1.8. Топология систем управления. Способы соединения элементов 23
1.9. Вычисление передаточных функций 25
1.10. Свободное и вынужденное движение 27
1.13. Характеристическое уравнение. Понятие корневого годографа 29
1.14. Построение частотных характеристик 31
2. Методы анализа качества систем управления 33
2.1. Понятие устойчивости систем управления 33
2.2. Критерии устойчивости Гурвица и Рауса (алгебраические) 35
2.3. Критерии устойчивости Михайлова и Найквиста (частотные) 38
2.4. Корневые показатели качества 39
2.5. Анализ качества САУ по переходной характеристике 43
2.6. Анализ качества САУ по частотным характеристикам 44
2.7. Статические и астатические системы 47
3. Основы оптимизации и методы синтеза систем управления 50
3.1. Постановка задачи параметрической оптимизации 50
3.2. Методика решения задачи параметрической оптимизации 51
4. Синтез адаптивных систем управления 57
4.1.Постановка задачи синтеза самонастраивающихся систем 57
4.1. Процедура синтеза закона управления 58
4.2. Синтез адаптивного управления при помощи ПИ- регулятора 61
4.3. Экстремальные системы управления 63
4.4. Оптимальное управление 64
4.5. Аналитическое конструирование регулятора 67
5. Дискретные и цифровые системы управления 71
5.1. Общие сведения 71
5.2. Модели дискретных процессов 71
5.3. Квантование непрерывных сигналов и теорема прерывания 74
5.4. Использование z - преобразования 76
5.5. Устойчивость и качество дискретных систем 77
5.6. Цифровые системы управления 79
6. Отдельные вопросы теории управления 83
6.1. Управляемость и наблюдаемость 83
6.2. Инвариантные системы управления 84
6.3. Расчет и анализ чувствительности 86
6.4. Робастные системы управления 87
7. Литература 91
Математическое моделирование систем управления
Основные понятия
Курс «Основы теории управления» посвящается общим основам теории автоматического управления и ориентирован на управление техническими объектами и процессами.
Рассмотрим истоки зарождения основ управления. Первая научно-техническая дисциплина этого направления – теория автоматического регулирования паровой машины – зародилась в недрах прикладной механики.
С необходимостью построения регуляторов одними из первых столкнулись создатели точных механизмов, в первую очередь часов. Влияние хотя и небольших, но непрерывно действующих помех накапливалось и приводило в конечном итоге к недопустимым отклонениям от нормального хода. В 1675 г. Гюйгенс встроил в механические часы маятниковый регулятор хода. Бурное развитие теории регулирования началось в эпоху промышленной революции в Европе на рубеже восемнадцатого и девятнадцатого веков. Первыми промышленными регуляторами этого периода являются автоматический регулятор давления пара котла паровой машины И.И. Ползунова, центробежный регулятор скорости паровой машины Д. Уатта. Эти регуляторы открыли путь целому потоку изобретений принципов регулирования и самих регуляторов.
В насточщее время существует большое разнообразие автоматических систем. Все автоматические системы можно разделить на два больших класса:
автоматы, выполняющие определенного рода однотипные операции;
автоматические системы, которые в течение достаточно длительного времени нужным образом изменяют или поддерживают неизмеными физические величины, например, координаты движущегося объекта, скорость движения и т.п. в том или ином управляемом процессе. Сюда относятся автоматические регуляторы, следящие системы, автопилоты, некоторые вычислительные устройства, системы дистанционного управления и т.п.
Всякий технический процесс характеризуется совокупностью физических величин, называемых показателями, величинами. Для управления и построения управляющих систем используются, во-первых, конкретные сведения о данном процессе, во-вторых, принципы и методы управления общие для самых разнообразных объектов и процессов. Конкретные сведения о процессе дают возможность установить основные цели управления. Для правильного и качественного управления процессом некоторые из его показателей (управляемые величины) необходимо поддерживать в заданных границах или изменять по определенному закону.
Совокупность технических устройств, использующих рабочие операции в ходе технологического процесса, называется объектом управления. Совокупность средств управления и объектов управления называется системой управления.
Необходимость в управлении процессом возникает тогда, когда нормальный его ход нарушается в результате различного рода возмущений, таких как изменение нагрузки, изменения внешней среды и др. Рассмотрим схематично влияние воздействий на объект
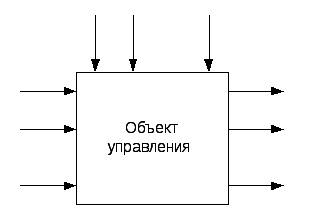
Здесь приняты следующие обозначения: u - вектор управляющих воздействий,f- вектор возмущений, y - вектор управляемых параметров. Таким образом,yявляется функцией отu , f, то есть можно записать
y =
![]() (u, f),
(u, f),
где
![]() -
оператор, определяющий вид математической
зависимости, связывающейy
, u, f. В общем
случае он представляет собой нелинейную
векторную функцию. Оператор для всей
системы управления в целом в общем виде
можно представить как
-
оператор, определяющий вид математической
зависимости, связывающейy
, u, f. В общем
случае он представляет собой нелинейную
векторную функцию. Оператор для всей
системы управления в целом в общем виде
можно представить как
y =
![]() (u,g, f),
(u,g, f),
где g– вектор задающих воздействий, т.е. требуемых функций или значений для управляемых параметров. Оператор системы является полной исчерпывающей ее характеристикой. Введем определение.
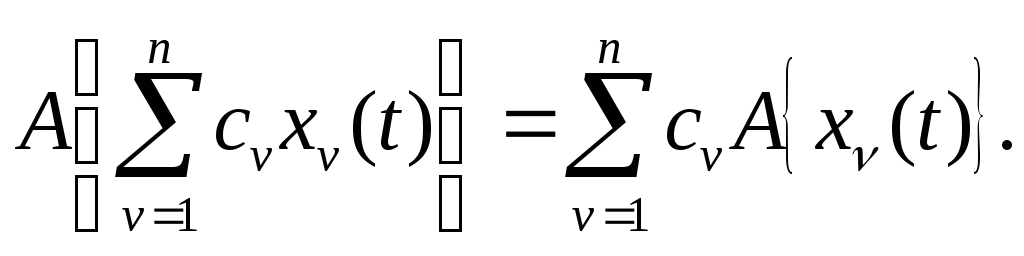
Оператор Аназывается линейным, если при любых
числахn, ![]() и при любых функциях
и при любых функциях![]() выполняется условие:
выполняется условие:
Динамическая система будет линейной, если ее оператор линеен.
Любой объект, имеющий массу, является динамическим, поскольку под действием внешних сил и моментов, со стороны объекта возникает соответствующая реакция, и его положение (состояние) не может измениться мгновенно. Изменения параметров объекта (процесса) определяются совокупностью правил или математической зависимостью, называемой алгоритмом функционирования. Такой алгоритм направлен на выработку управляющих воздействий u. Приведем ряд важных определений.
АСУ - автоматизированная система управления, выбранная для достижения цели управления в сочетании с человеком - оператором и комплексом технических средств, спроектированных для измерения, регулирования, сбора информации, выработки решений. Важным свойством автоматизированной системы является то, что система обладает свойствами и выполняет функции, которые существенно отличаются от свойств и функций ее отдельных частей.
САУ – система автоматического управления, она представляет собой комплекс технических средств, назначение которого управлять поведением объекта без участия человека.
САР - система автоматического регулирования. САР это комплекс технических средств, обеспечивающий автоматическое поддержание заданного значения регулируемой величины или ее автоматическое изменение по определенному закону без участия человека.
Устройство, обеспечивающее процесс управления называется управляющим. Элементы системы автоматического управления связаны между собой информационными каналами, линиями управления, по которым, передаются управляющие сигналы. Система автоматического управления представляет собой совокупность объекта управления (ОУ) и управляющего устройства (УУ). Система автоматического регулирования представляет собой совокупность объекта регулирования (ОР) и регулятора (РГ). САР является замкнутой системой, замыкание осуществляется через обратную связь. В обратную связь, как правило, входит измерительное устройство, сигнал с выхода которого посылается на сравнивающее устройство.
Все одномерные системы управления, то есть имеющие один вход и один выход, могут быть сведены к соединению с обратной связью. Рассмотрим функциональную схему САР:
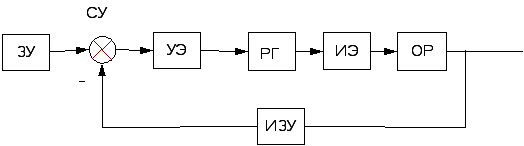
Здесь приняты следующие обозначения: ЗУ- задающее устройство, предназначенное для задания требуемого значения или закона изменения регулируемой величины; СУ - сравнивающее устройство, предназначенное для сравнения измеренного значения регулируемой величины с требуемым; УЭ - усилительный элемент, предназначенный для усиления мощности сигнала в цепи управления, он питается энергией от внешнего источника;
РГ – регулятор, это устройство, которое в зависимости от величины поступающего сигнала, в соответствии с заложенным в нем законом, вырабатывает управляющий сигнал определенной величины; ИЭ - исполнительный элемент, этот элемент воздействует на объект регулирования; ОР - объект регулирования; ИЗУ - измерительное устройство, оно измеряет или регистрирует значение измеряемого параметра. Обычно оно представляет собой преобразователь одной физической величины в другую. Измерительные устройства необходимы для преобразования управляемых переменных в сигналы управления. Система, состоящая из объекта регулирования и регулятора, называется контуром управления. Устройство, обеспечивающее процесс управления, называется управляющим.
Рассмотрим принцип управления по отклонению регулируемой величины от заданного значения. Он основан на использовании информации о результатах управления. При управлении с обратной связью значение управляемой переменной постоянно сравнивается с ее заданным (эталонным) значением. В представленной ниже схеме, состоящей из регулятора и объекта регулирования, показано приложение воздействий и следование сигналов:
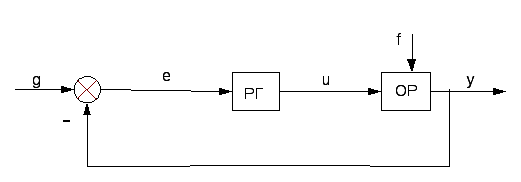
На объект регулирования воздействует внешнее возмущение fи управляющее воздействиеu с регулятора. Информация о состоянии ОР передается по цепи обратной связи на вход системы, где сравнивается с заданным значениемg. Разностьe = g – y воздействует на регулятор. Введение обратной связи приводит к тому, что обратная связь входит в канал управления. Этот принцип управления является фундаментальным.
Рассмотрим следующий принцип управления - управление по возмущению. Он предусматривает измерение fи создание управляющих воздействий, компенсирующих влияниеf на объект:
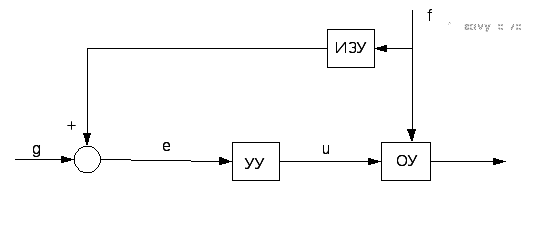
Возмущение, действующее на ОУ, измеряется и подается на вход системы, где суммируется с g. На основе этой информации управляющее устройство вырабатывает управляющее воздействиеu, подаваемое на объект управления. К достоинствам такого принципа управления можно отнести высокое быстродействие, а к недостаткам то, что невозможно заранее учесть весь спектр возможных возмущений и воздействий, и как следствие, возможность потери устойчивости в процессе управления объектом. Система разомкнутого цикла отличается от системы замкнутого цикла тем, что в системе с обратной связью имеет место сравнение реального значения управляемой переменной с ее заданным (эталонным) значением, а в разомкнутой системе такое сравнение отсутствует.
Рассмотрим схему комбинированного принципа управления:
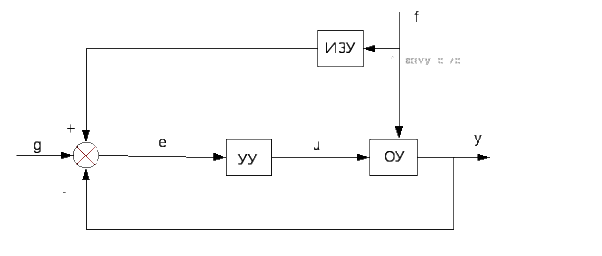
Отметим, что автоматические системы высокой точности обычно строятся по принципу комбинированного управления (по отклонению и по возмущению).
Рассмотрим принцип управления - адаптацию:
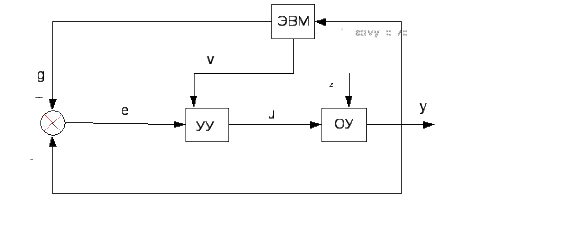
Схема состоит из обычной системы управления и контура самонастройки. Самонастраивающаяся система - это система, в которой в процессе функционирования автоматически в соответствии с формируемым ЭВМ законом управления изменяются определенные параметры управления, обеспечивая заданного качества управления в условиях непостоянности задающих и возмущающих воздействий. Адаптивные системы бывают самонастраивающиеся и самоорганизующиеся, последним из которых присуща автоматическая перестройка конфигурации структуры в процессе работы системы.
Одной из существеных характеристик системы автоматического регулирования является зависимость значения регулируемого параметра от величины внешнего воздействия. По виду такой рабочей характеристики различают статическое и астатическое регулирование. Регулирование со статической характеристикой это регулирование, при котором в установившемся режиме имеется определенная зависимость между величиной отклонения регулируемого параметра от заданного значения и величиной внешнего воздействия. В противном случае имеет место астатическое регулирование. Система управления (СУ) называется системой прямого действия, если у нее при изменении значения управляемого параметра исполнительный элемент приходит в действие непосредственно от сигналов возникающих в чувствительных элементах без использования вспомогательной энергии. В противном случае система является системой непрямого действия. Стабилизирующей системой управления называется такая система управления, назначение которой поддерживать значение регулируемого параметра постоянным (g(t)=const). Следящей системой управления называется такая система управления, которая изменяет величину управляемого параметра в зависимости от неизвестного заранее значения задающего воздействия (g(t) – случайная величина). Система управления, у которой задающее воздействиеg(t)– известная функция, называется системой программного управления. Перейдем к рассмотрению математического описания процессов, происходящих в системах регулирования.