

Устойчивость и качество дискретных систем
В дискретных системах
автоматического регулирования
устойчивость будет иметь место, если
все полюсы передаточной функции замкнутой
системы, т.е. корни характеристического
уравнения, лежат в левой полуплоскости
области s.Границей
устойчивости является мнимая ось. Для
построения области устойчивости в
плоскости комплексной величиныzотобразим мнимую ось плоскостиs
на плоскость z.Для этой цели необходимо сделать
подстановку![]() и менять затем частоту
и менять затем частоту![]() в пределах от
в пределах от![]() до
до![]() .
Таким образом, получаем
.
Таким образом, получаем![]() .
При изменении частот в указанных пределах
на плоскостиz
получится окружность единичного
радиуса, представляющая собой область
устойчивости. Условием устойчивости
будет расположение особых точек (полюсов)
передаточной функции замкнутой системыФ(z),внутри
этой окружности. Корни характеристического
уравнения должны быть ограничены по
модулю:
.
При изменении частот в указанных пределах
на плоскостиz
получится окружность единичного
радиуса, представляющая собой область
устойчивости. Условием устойчивости
будет расположение особых точек (полюсов)
передаточной функции замкнутой системыФ(z),внутри
этой окружности. Корни характеристического
уравнения должны быть ограничены по
модулю:![]()
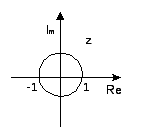
Отметим очень важное требование. Передаточная функция устойчивой стационарной дискретной линейной системы должна быть конечна всюду вне единичного круга плоскости комплексного переменного zс центром в начале координат.
Оценка качества дискретной системы регулирования может делаться построением кривой переходного процесса, что при использовании z– преобразования осуществляется сравнительно легко, а также посредством
различных критериев качества. Наиболее простым является использование показателя колебательности, который может характеризовать запас устойчивости системы. Как и в случае непрерывных систем, получение заданного показателя сводится к требованию, чтобы амплитудно – фазовая характеристика системы не заходила в запретную зону, окружающую точку
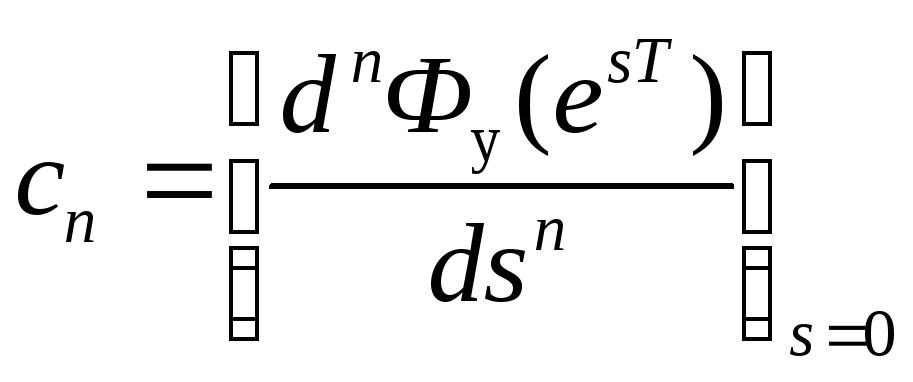
(-1, j0). Точность импульсной системы может оцениваться по коэффициентам ошибок. Аналогично непрерывным системам, начиная с некоторого момента времени ошибку дискретной системы регулирования можно представить в виде ряда
![]()
где y- выходной сигнал,g–
входной сигнал,![]() -
коэффициенты ошибок, которые представляют
собой коэффициенты разложения передаточной
функции
-
коэффициенты ошибок, которые представляют
собой коэффициенты разложения передаточной
функции![]() по ошибке в ряд Маклорена по степенямs:
по ошибке в ряд Маклорена по степенямs:
 .
.
Величины, обратные
коэффициентам
![]() могут называться соответствующими
добротностями. Например, добротность
по скорости
могут называться соответствующими
добротностями. Например, добротность
по скорости
![]()
добротность по ускорению
![]()
и т.д.
Пример 5.3. Вычислим коэффициент добротности по скорости для системы с передаточной функцией разомкнутой цепи
![]() ,
,
где
![]() .
.
Решение.Найдем передаточную функцию по ошибке:
![]() .
.
Подстановка в это
выражение z = 1 дает
коэффициент![]() Для получения
Для получения
коэффициента
![]() находим
первую производную:
находим
первую производную:

Подстановка z = 1 дает коэффициент
![]() ,
,
а также добротность по скорости
![]() .
.
Цифровые системы управления
В настоящее время широкое применение находят цифровые системы управления. Использование в этих системах цифровых вычислительных устройств обеспечивает реализацию достаточно сложных алгоритмов (законов) управления, а также высокую точность вычислений [7]. Цифровые САУ относятся к классу дискретных систем, в которых квантование сигнала осуществляется одновременно по времени и по уровню. При синтезе цифровых САУ можно использовать либо цифровую вычислительную машину, либо отдельные цифровые устройства в виде сумматоров, интеграторов и т.д. Использование цифровых устройств позволяет упростить САУ путем применения простых и надежных модулей. Введение в контур управления ЭВМ требует наличия в САУ вспомогательных элементов, осуществляющих преобразование непрерывных процессов в дискретные и обратно. Но это окупается возможностью реализации практически любого алгоритма управления. В зависимости от способа включения ЭВМ цифровые САУ могут быть трех типов:
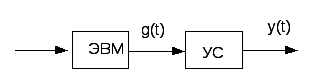
- с ЭВМ, включенной вне замкнутого контура управления; в этом случае ЭВМ служит для формирования на основании наблюдаемого процесса y(t)
оптимального задающего воздействия на входе управляемой системы (УС):
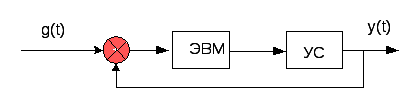
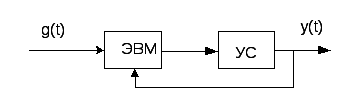
- с ЭВМ в замкнутом контуре управления; при этом улучшения динамических свойств САУ достигают благодаря возможности формирования практически любого алгоритма управления и изменения его в процессе работы; точность такой САУ ограничивается непрерывным сравнивающим устройством, включенным в цепь управления до ЭВМ:
- с ЭВМ, в которой происходит сравнение задающего воздействия g(t)с выходным сигналомy(t). Такая САУ обладает всеми качествами предыдущей системы и к тому же является более точной за счет увеличения разрешающей способности цифрового сравнивающего устройства. С точки зрения структуры она охватывает обе предыдущие системы:
Выбор конкретного типа ЭВМ определяется в первую очередь теми функциями, которые САУ следует выполнять. Это может быть обработка поступающей информации, которая требует вычислительных или логических операций, улучшение динамических свойств системы, операции оптимизации по некоторым статическим или динамическим параметрам, операции контроля и т.д.
Теоретической базой для аналитических исследований цифровых САУ
может служить теория
дискретныз систем. Сложность при этом
состоит в обеспечении одновременного
квантования сигнала и по времени и по
уровню. Воспользуемся методами расчета,
которые основаны на рассмотрении
линеаризованных импульсных систем с
учетом влияния оказываемого квантованием
по уровню. Идеальный импульсный элемент
преобразует непрерывный сигнал в
мгновенные импульсы в виде
![]() -
функций, а экстрополятор формирует
импульсы заданной формы из
-
функций, а экстрополятор формирует
импульсы заданной формы из![]() -
импульсов. В простейшем случае импульсное
звено можно выполнить в виде ключа,
который замыкается с периодомТ. Если время замыкания ключа мало по
сравнению сТи постоянными времени
непрерывной части системы, а сигнал на
входе ключае = const
в замкнутом состоянии, то
последовательность модулированных
импульсов на входе ключа можно заменить
последовательностью
-
импульсов. В простейшем случае импульсное
звено можно выполнить в виде ключа,
который замыкается с периодомТ. Если время замыкания ключа мало по
сравнению сТи постоянными времени
непрерывной части системы, а сигнал на
входе ключае = const
в замкнутом состоянии, то
последовательность модулированных
импульсов на входе ключа можно заменить
последовательностью![]() - функций:
- функций:
![]()
Значение каждой
![]() -
функции пропорционально величине
сигнала на входе ключа в момент его
замыкания. На выходе импульсного элемента
получают сигнал
-
функции пропорционально величине
сигнала на входе ключа в момент его
замыкания. На выходе импульсного элемента
получают сигнал
![]()
Сигналы в импульсных системах обычно представляются дискретными (решетчатыми) функциями. При исследовании динамических свойств САУ в первую очередь необходимо определить ее передаточные функции. Рассмотрим сначала передаточные функции импульсных систем. Передаточная функция разомкнутой импульсной системы – это отношение изображений (в соответствии с дискретным преобразованием Лапласа) выходного сигнала к входному сигналу при нулевых начальных условиях, т.е.
![]()
Аналогично определяется эта передаточная функция в соответствии с z– преобразованием:
![]()
Для определения передаточной функции W(z)по известной передаточной функции приведенной непрерывной части САУW(s)необходимо сначала с помощью обратного преобразования Лапласа найти весовую функцию непрерывной части системы
![]()
Затем по этой функции
определить соответствующую ей дискретную
весовую функцию
![]() ,
по которой, используяz– преобразование, найти искомую
передаточную функцию:
,
по которой, используяz– преобразование, найти искомую
передаточную функцию:
![]() .
.
Передаточная функция вычислительной машины – это отношение изображений выходного сигнала к входному, которые взяты в безразмерной (цифровой) форме:
 ,
,
где
![]() и
и![]() естьz- изображения
решетчатых функций
естьz- изображения
решетчатых функций![]() и
и![]() .
Переходя от изображений к оригиналам,
из последнего выражения можно получить
разностное уравнение вычислительной
машины:
.
Переходя от изображений к оригиналам,
из последнего выражения можно получить
разностное уравнение вычислительной
машины:
![]()
которое соответствует линейному алгоритму ее работы. Из уравнения следует, что настоящее значение выходного сигнала определяется предыдущими его значениями и настоящими и предыдущими значениями входного сигнала. При синтезе и анализе цифровых САУ применяются частотные передаточные функции и частотные характеристики. Анализ качества цифровых САУ выполняется аналогично анализу качества дискретных САУ.