

Статические и астатические системы
Рассмотрим динамическую систему с одним входным воздействием x(t) [5]:
y(t) = W(p) x(t),
где
W(p) = A(p)/B(p),
А(p)
= am
pm +
am-1p![]() +...
+ao,
+...
+ao,
B(p)
= bnpn
+bn-1
p![]() +...+
b
+...+
b![]() ,
,
![]() .
.
Будем полагать, что
в данном случае в качестве входа x(t)может выступать как задающее, так и
возмущающее воздействие, а под системой
управления подразумевается как
разомкнутая система, так и замкнутая.
Для статической системы, т.е. системы,
у которойb![]()
![]() 0,
значение передаточной функции в
точкеp = 0определяется
как :W(0) =a
0,
значение передаточной функции в
точкеp = 0определяется
как :W(0) =a![]() / b
/ b![]() =
k,
гдеk– статический коэффициент
системы, и при постоянном входном
воздействиих(t) = constимеет место
=
k,
гдеk– статический коэффициент
системы, и при постоянном входном
воздействиих(t) = constимеет место![]() .
Отметим, что для статической системы
характеристическое уравнениеB(p)
= 0не имеет нулевых корней.
Включение статического (пропорционального)
регулятора в схему управления уменьшает
статизм замкнутой системы в1/(k+1)раз, гдеk– коэффициент усиления
разомкнутой системы, при этом увеличивается
астатизм, то есть возрастает точность
выполнения командного (задающего)
сигнала.
.
Отметим, что для статической системы
характеристическое уравнениеB(p)
= 0не имеет нулевых корней.
Включение статического (пропорционального)
регулятора в схему управления уменьшает
статизм замкнутой системы в1/(k+1)раз, гдеk– коэффициент усиления
разомкнутой системы, при этом увеличивается
астатизм, то есть возрастает точность
выполнения командного (задающего)
сигнала.
Теперь рассмотрим астатическую систему, полагая
b0= b1= …= bk-1=
0, bk![]() 0.
0.
Ее характеристическое уравнение может быть приведено к виду
![]() ,
,
где
![]() .
.
Такой полином имеет kнулевых корней. Числоkназвается порядком астатизма. Для астатической системы можно записать
![]() ,
,
где
![]() .
.
Характерным признаком астатизма служит наличие в структурной схеме kинтегрирующих звеньев:
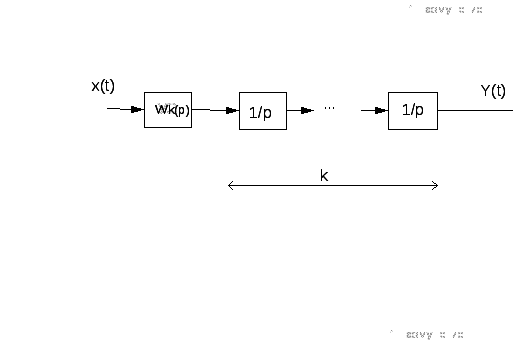
Порядок астатизма системы по управляющему воздействию равен числу интегрииующих звеньев, входящих в контур. Порядок астатизма замкнутой системы по отношению к рассматриваемому воздействию равен числу интегрирующих звеньев, включенных в цепь обратной связи между точками приложения этого воздействия (входом) и измерения ошибки (выходом) и не зависит от числа интегрирующих звеньев, включенных в цепь прямого преобразования сигнала между этими точками. Так как для астатической системы значение W(0)не определено, то можно ввести в рассмотрение показатель
![]() ,
,
называемый добротностью системы по соответствующей производной выходной переменной (по скорости, ускорению и т.д.). Отметим, что астатизм системы управления может быть обусловлен свойствами объекта управления или наличием в составе системы ПИиПИД– регуляторов. Реализация замкнутых систем с высоким порядком астатизма достаточно затруднительна, поскольку система автоматического регулирования, содержащая всего два интегрирующих звена, является структурно неустойчивой и не может быть реализована без специальных корректирующих устройств. Важно знать, что чем выше порядок астатизма системы, тем выше точность в установившемся режиме и меньше запас устойчивости. Введение пропорциональной составляющей в закон управления по отклонению влияет и на точность и на устойчивость.
В завершение раздела отметим следующие простые, но важные положения.
1. При любых последовательных и параллельных соединениях устойчивых систем всегда будет получаться устойчивая система.
2. Если среди соединяемых последовательно или параллельно систем имеется хотя бы одна неустойчивая, то и вся система, полученная в результате соединения, будет неустойчивой.
3. Исследование устойчивости любой линейной системы, полученной путем последовательного и параллельного соединения любого количества элементарных систем, может сводиться к исследованию устойчивости отдельных элементарных систем, входящих в ее состав.
4. Зная полюсы передаточных функций элементарных звеньев, легко определить какие полюсы в правой полуплоскости будет иметь передаточная функция системы, полученная путем последовательных и параллельных соединений этих звеньев, в случае, если она неустойчива.