

Критерии устойчивости Михайлова и Найквиста (частотные)
Частотные критерии устойчивости стационарных линейных систем были найдены Найквистом и Михайловым. Запишем характеристическое уравнение САУ при s = iс целью его рассмотрения в частотной области:
B(i) = bn (i)n + bn-1 (i)n-1+ ...+ bo = A () e i () = P() + i Q() = 0.
При изменении от 0 до, векторB(i)начинает описывать в комплексной плоскости кривую, которую называют кривой Михайлова:

Михайлов доказал
что, для того чтобы САУ была устойчива
необходимо и достаточно, чтобы вектор
кривой B(i)при=![]() повернулся, нигде не обращаясь в 0, вокруг
начала координат против часовой стрелки
на угол (
повернулся, нигде не обращаясь в 0, вокруг
начала координат против часовой стрелки
на угол (![]() n)/2,
гдеn- степень
характеристического уравнения. Отметим,
что в неустойчивых системах нарушается
последовательность прохождения кривой
Михайлова квадрантов комплексной.
n)/2,
гдеn- степень
характеристического уравнения. Отметим,
что в неустойчивых системах нарушается
последовательность прохождения кривой
Михайлова квадрантов комплексной.
В 1932 году Найквистом был опубликован критерий, позволяющий судить об устойчивости замкнутой системы по амплитудно-фазовой характеристике Z(j)разомкнутой системы, что позволило значительно упростить расчеты. Примем во внимание тот факт, что если система управления в разомкнутом состоянии неустойчива, то ее характеристическое уравнение имеетkкорней, лежащих в правой полуплоскостиs. Рассмотрим функцию
1+ Z(i)
= 1 +![]() .(2.1)
.(2.1)
В числителе этой функции содержится характеристический полином замкнутой системы, в знаменателе – характеристический полином разомкнутой системы. Пусть степень полинома A(s) = a0 sm + a1 sm-1+ ...+ am
не выше степени nполиномаB(s)= b0 sn + b1 sn-1+ ...+ bn .Тогда степени числителя и знаменателя (2.1) одинаковы и равныn. В плоскостиs функция1+ Z(i) изображается вектором, начало которого находится в точке (-1,0), а конец расположен на амплитудно-фазовой характеристике разомкнутой системы.
Для того, чтобы установившееся движение в замкнутой системе было устойчивым, необходимо и достаточно, чтобы при возрастании от0довектор1+ Z(i),скользящий своим концом по амплитудно – фазовой характеристике разомкнутой системы, повернулся вокруг точки (-1, j) в направлении по часовой стрелкеk/2раз, гдеk– число правых корней характеристического уравнения разомкнутой системы. Под правыми корнями здесь понимаются корни, расположенные в правой полуплоскости комплексной плоскостиs.
Корневые показатели качества
Отметим, что основными показателями качества системы управления являются устойчивость, быстродействие и точность. Необходимым и достаточным условием устойчивости системы управления считается выполнение условия:
i
< 0; (si
=i+ji
,i=![]() )
)
где si - корни характеристического уравнения замкнутой системы. Рассмотрим влияние вида корней характеристического уравнения замкнутой системы управления на поведение системы управления во времени в переходном и установившемся режимах при подаче на вход системы единичной ступенчатой функции.
si = i < 0, (i= 1,…,n)

si = i +j, i < 0, ( i = 1,…, n)

s i = i > 0

s i = i + j i, i > 0,
h(t)
 t
t
si = j, автоколебания
h(t)
 t
t
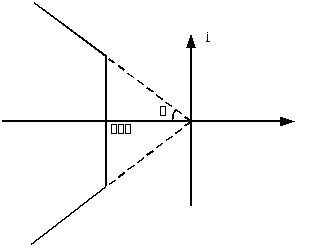
Введем в рассмотрение область задания расположения корней характеристического уравнения эталоной (идеальной) САУ:
si , (=+j:-,> 0, |||| ).
Здесь приняты следующие обозначения: - степень устойчивости;- показатель колебательности. Областьвыглядит следующим образом:
где
![]() .
Для оценки качества САУ в комплексной
плоскости понадобятся знания следующих
характеристик:
.
Для оценки качества САУ в комплексной
плоскости понадобятся знания следующих
характеристик:
степени устойчивости
= | max Re(si)|, Re(si) < 0, ( i = 1,…, n),
запасом устойчивости по амплитуде называется относительное
увеличение коэффициента усиления разомкнутой системы, при котором
устойчивая система доходит до границы области устойчивости;
колебательности
= |Im (sдом) / Re (sдом)|; = arctg ,
колебательность обычно имеет значение 1 - 2, но в отдельных случаях
допускается до 3;
времени регулирования
Tрег
= (1/)
ln (1/![]() );
);
- демпфирования (затухания)
![]() = 1 - exp(-2/),
= 1 - exp(-2/),
демпфирование допускается в пределах 90-98%;
- переходной функции

функции веса

В введенных формулах
приняты следующие обозначения: si- корень характеристического уравнения;sдом-
доминантный полюс, то есть такой полюс,
который имеет минимальный модуль;А(s)иВ(s)–
соответственно полиномы числителя и
знаменателя передаточной функции
замкнутой системы;n- порядок полиномаВ(s);![]() -
малое действительное положительное
число, характеризующее максимально
допустимое отклонение процесса на
выходе объекта управления от заданного
после окончания переходного процесса.
-
малое действительное положительное
число, характеризующее максимально
допустимое отклонение процесса на
выходе объекта управления от заданного
после окончания переходного процесса.
Следует подчеркнуть, что корни полинома с действительными коэффициентами всегда являются либо действительными числами, либо попарно - сопряженными комплексными величинами.