

Дискретные и цифровые системы управления
Общие сведения
Линейной системой импульсного регулирования называется такая система автоматического регулирования, которая кроме звеньев, описываемых обыкновенными линейными дифференциальными уравнениями, содержит импульсное звено, преобразующее непрерывное входное воздействие в равноотстоящие друг от друга импульсы. Рассмотрим принцип работы дискретных систем управления, которые наряду с цифровыми относятся к импульсным системам. Будем считать [5], что квантование сигналов х(t)по времени осуществляется с постоянным интервалом (периодом)Т, и сигналы дискретной системыx(kT)представлены последовательностями идеальных импульсов различной амплитуды, определенных в равноотстоящие моменты времениt = kT. Целое число
k = 0,1,2,…называется дискретным временем, а сами амплитудно - модулированные импульсные последовательности - решетчатыми функциями. С целью упрощения обозначений дискретные сигналы рассматриваемого типа часто записываются просто как функции дискретного времениx(k), т.е.
![]() .
.
Описание дискретного процесса может быть представлено как решение разностного уравнения. Наиболее распространены разностные уравнения
n– го порядка (модели вход – выход) и системы уравнений первого порядка
(модели вход – состояние - выход), а также их операторные формы. Дискретные модели либо отражают динамику реальных квантованных по времени процессов, либо являются одной из форм приближенного описания систем непрерывного действия. В последнем случае возникает необходимость рассмотрения вопросов квантования и методов преобразования динамических систем к дискретной форме, т.е. их дискретизации.
Модели дискретных процессов
Разностные уравнения, описывающие динамику систем дискретного времени получаются в результате анализа реальных процессов в различные моменты дискретного времени k.
Пример 5.1.Рассмотрим цифровой накопитель (счетчик),
содержимое которого в дискретные моменты
времениkописывается
функцией![]()
с начальным значением
![]() .
В моментk на вход
счетчика поступает сигнал
.
В моментk на вход
счетчика поступает сигнал![]() ,
в результате чего в последующий момент
дискретного времениk
+ 1происходит увеличение содержимого
счетчика на величину этого сигнала:
,
в результате чего в последующий момент
дискретного времениk
+ 1происходит увеличение содержимого
счетчика на величину этого сигнала:
![]() (5.1)
(5.1)
Последнее выражение и является моделью счетчика, представленной в форме разностного уравнения первого порядка. Уравнение (5.1) можно записать в операторной форме. Введем в рассмотрение оператор сдвига (упреждения) z, действующий по схеме
![]()
и после элементарных преобразований получим
![]() (5.2)
(5.2)
Оператор 1/(z - 1)является передаточной функцией дискретной системы (5.1).
Пример 5.2.Проанализируем прохождение однородных предметов (товаров) в торговой системе склад – магазин, функциональная схема которой представлена на рисунке
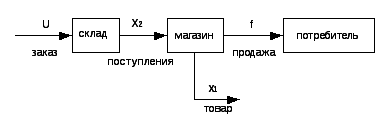
Рис. 5.1. Система склад – магазин
Здесь
![]() -
число товаров в магазине,
-
число товаров в магазине,![]() -
товары, поступающие со склада,
-
товары, поступающие со склада,![]() -
заказанное количество товаров (заказ),
-
заказанное количество товаров (заказ),![]() -
число реализованных (проданых) товаров,k– дискретное время
в днях. Начальное состояние системы (в
моментk =0)
характеризуется значениями
-
число реализованных (проданых) товаров,k– дискретное время
в днях. Начальное состояние системы (в
моментk =0)
характеризуется значениями![]() и
и![]() .
.
Динамика товаров в магазине описывается разностным уравнением
![]() (5.3)
(5.3)
в котором число проданных единиц товара f(t)выступает в роли возмущающего воздействия. Полагая, что заявка выполняется складом с задержкой в один день, запишем модель склада в виде
![]() (5.4)
(5.4)
где заявка u(k)на требуемое количество товара играет
роль управляющего воздействия. Если
задача управления ставится как задача
регулирования объема товаров в магазине,
то переменная![]() считается выходом системы:
считается выходом системы:
![]() .
(5.5)
.
(5.5)
Таким образом,
рассматриваемая система описывается
уравнениями состояния (5.3) – (5.4) и
уравнением выхода (5.5). Разностные
уравнения состояния связывают значения
переменных состояния
![]() и
и![]() в последующий момент дискретного времениk + 1(следующий
день) с переменными системы в текущий
момент времениk. С
использованием оператора сдвигаzполученые разностные уравнения (5.3) –
(5.4) можно привести к операторной форме:
в последующий момент дискретного времениk + 1(следующий
день) с переменными системы в текущий
момент времениk. С
использованием оператора сдвигаzполученые разностные уравнения (5.3) –
(5.4) можно привести к операторной форме:
![]()
![]()
удобной для построения структурной схемы
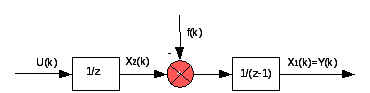
Рис. 5.2. Структурная схема склад – магазин
Модель дискретной системы может быть также представлена в форме вход – выход. Для этого уравнение (5.3) переписывается для времени k + 2:
![]()
После подстановки выражений (5.4) и (5.5), находим
![]()
Полученное разностное уравнение второго порядка связывает объемы товаров в моменты дискретного времени k+2 и k+1 с соответствующими значениями заказаu(k) и продаж f(k+1).
Для решения
задачи стабилизации количества товаров
в магазине yна заданном
уровне![]() может быть использована простейшая
стратегия управления заказами –
пропорциональный алгоритм управления
может быть использована простейшая
стратегия управления заказами –
пропорциональный алгоритм управления
![]()
где
![]() - отклонение,К– постоянный
коэффициент. Графики процессов в такой
системе при постоянном спросеf(k)
= constприведены на
рисунках и представлены решетчатыми
функциями:
- отклонение,К– постоянный
коэффициент. Графики процессов в такой
системе при постоянном спросеf(k)
= constприведены на
рисунках и представлены решетчатыми
функциями:![]()
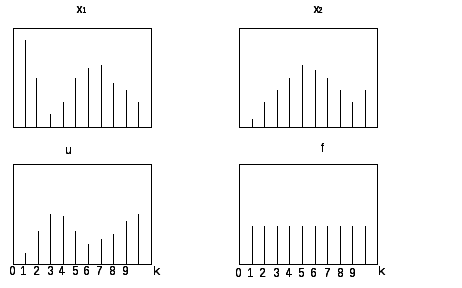
Рис. 5. 3. Процессы системы склад – магазин