

Основные понятия и определения. Общая функциональная структура САУ.
Курс ТАУ ставит своей целью ознакомление с принципами построения систем автоматического управления и методами исследования процессов в них протекающих. Управление – это целенаправленное воздействие на что либо. Управление является автоматическим, если происходит без вмешательства человека с применением специальных технических средств. Разработка общих принципов построения этих задач является основной задачей ТАУ. Теория дает единую базу для построения и решения задач управления объектами любой физической химической и биологической природы. САУ – совокупность объектов управления и управляющего устройства. Объектом управления – совокупность материальных обьектов специальных технических средств носителей вещества или энергии среди которых осуществляется некоторый технологический процесс нуждающийся в управлении. Все переменные входящие в СУ бывают внешними и внутренними. Внешние – это такие переменные которые могут меняться независимо от состояния объекта и влиять на процессы в нем происходящие. Внутренние – это такие переменные, которые характеризуют технологию протекающего в объекте процесса, т.е. его состояния, их обычно называют переменными состояния. Вешние делятся на 2 группы – полезные и мешающие. Полезные – воздействие которых проектировщик может формировать по своему усмотрению и с их помощью заставлять функционировать объект должным образом. Общая функциональная структура САУ
н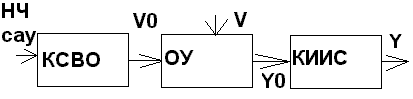 чсау
– неизменная часть сау.
чсау
– неизменная часть сау.
Ксво – комплекс средств воздействия на объект. Киис – комплекс информационно измерительных средств.
у чсау
– управляющая часть сау. Кслу комплекс
средств локального управления. Увк
управляюще вычислительный комплекс.
Ксуу – комплекс средств усиления
управляющих направлений.
чсау
– управляющая часть сау. Кслу комплекс
средств локального управления. Увк
управляюще вычислительный комплекс.
Ксуу – комплекс средств усиления
управляющих направлений.
НЧСАУ – обычно совокупность собственного технологического объекта и комплекса технических средств обеспечивающие оценку состояния объекта и воздействия протекающих в нем процессах. УЧСАУ – представляет собой комплекс технических средств с раздельными функциями.
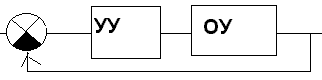
Фундаментальные принципы управления . разомкнутое (управление по внешнему воздействию) и замкнутое (управление по отклонению). Достоинства разомкнутого : быстродействие простота и надежность. Недостатки – низкая точность, громоздкость алгоритма. Разомкнутое воздействие может быть по управляющему воздействию и по возмущающему. Достоинства замкнутого : универсальный характер управления, принудительная независимость результатов, высокая точность. Недостатки – более низкая быстродействие. Синтезом двух принципов является комбинированный принцип управления. В замкнутом управл. Используют принцип обратной связи.
Классификация сау они делятся по…
Принцип управления (разомкнутое, замкнутое, комбинированное)
Количество управляемых величин (одномерные, многомерные)
Характер параметров (стационарные, нестационарные, с распред. параметром)
Реакция воздействия (статическая, астатическая)
Цель управления (системы стабилизации, системы прогр. цир., следящие системы)
Количество контуров управления (одно и много контурные)
Идеализация математического описания (линейные и нелинейные)
Вид используемой энергии (механические, электрические, пневматические)
Математическое описание обьектов. Формы представления
m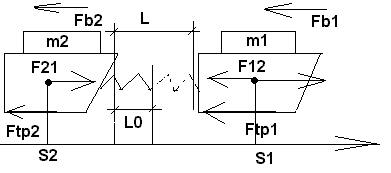 1*a1=sumF1=Ft-Ftp1-F12-Fb1
1*a1=sumF1=Ft-Ftp1-F12-Fb1
m2*a2=sumF2=F21-Fb2-Ftp2
F12=F21=(L-L0)c=delta Lc
Ftp1=alfa1*V1 Ftp2=alfa2*V2
a1=dV1/dt
a2=dV2/dt
m1*(dV1/dt)=Ft-alfa1V1-deltaLc-Fb1
m2*(dV2/dt)= deltaLc-Fb2-alfa2V2
dS1/dt=V1 dS2/dt=V2
н
V1=X1 X
` 1=1/m1(U-alfaX1-deltaLc-V1) V2=X2 X
` 2=1/m2(deltaLc-V2-alfa2X2)
S1=X3 X `
3=X1 S2=X4 X
` 4=X2 Ft=U Y=X2 Fb1=V1 Fb2=V2
X=Ax+Bu+Cv -1
Y=Cx+Du+Hv -2
A – системная матрица
1 векторное уравнение состояния
2уравнение наблюдения
В – матрица управляющих входов
G – матрица входа возмущающих, С – матрица связи переменных состояний, D матрица связи управлений с выходом, H – матрица связи возмущений с выходом.
Размерность – А n*m где n размерность объекта
B – n*m, G- n*r, C – p*n, D – p*m, H – p*r. m – количество управлений, r- количество возмущений, p- количество выходов.
Математический модуль
М.д. является степень выражений в которых буквенными символами обозначен реальные физ величины изменяющееся в процессе функц объекта. А символами математических операций отражаются реальные физ законы преобразования этих переменных в объекты.
Степень обыкновенности модели из реального объекта оценивается по степени совпадения результатов анализа.
Основной трудностью использования вход выходной формы ????? является сложность и громоскость решения дыр уравнений, особенно нелинейных частных производных. Подавляющее большинство ??????? систем описывается такими диф уравнениями.
Для упрощения анализа исследования и анализ подобных систем используем процедуру линорезации.
Для осущ операции литеризаций необходимо что бы функция была диференциальна на всём протяжении( не имела разрыва неоднозначности). В этой точке переменные Xi=Xi^0
Производная переменной Xi`=0
Ф – частные производные порядка 1-го выше и ??????? производные от ?????? составляющих.
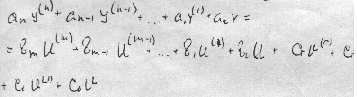
Вход выходные формы математического описания объектов и систем управления.
Два типа преобразования.
Сущность преобразования ????????
Операции дыр с ???????? заменяются операциями умножения и деления, это упрощает исследование объектов и систем

Передаточная функция это отношение изображения по лапласу выходного сигнала к входному при нулевых начальных условиях.
Передаточная функция по началу
исследования
По системе уравнений можно составить передаточную матрицу в ячейхак которой находятся передаточные ф-и но ??????????????
Свойства передаточной функции
-
Передаточная функция линейного звена является ?????????? то есть отношение многочленов ?????? переменной P(S)
-
Порядок полинома в числителе не должен превышать порядок многочленов в знаменателе. Свойство относиться к реальным физическим реализуемым объектам системы.
-
Передаточные функции по определённым взятым ????? для ????? и так же выходной переменной имеют один и тот же полином в знаменателе
Замечание
?????? во вход выходной форме справедливо только для линейных ??????? систем.
Понятие динамического звена- когда переменная изменяется во времени( присутствует производная в математическом описании звена)
Свойство полиномов числителя и знаменателя передаточной функции.
Виды передаточных функций
-
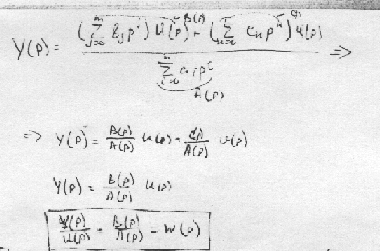
Дробно рациональная функция порядок полинома числителя которого намного меньше порядка полинома числителя W(p)=B(p)/A(p)
-
Приведённая форма бывает структурированного вида
Структурированный вид - ???? полинома в числителе и знаменателе по теореме Безу.

Параллельно структурированная форма
Что бы получить нужно выражения (1) разложить на сумму элементарных дробей
Рассмотрим 3 форму
Каноническая форма W^k=kp^v*B(p)/A(p)
k- коэф передачи
v- порядок….
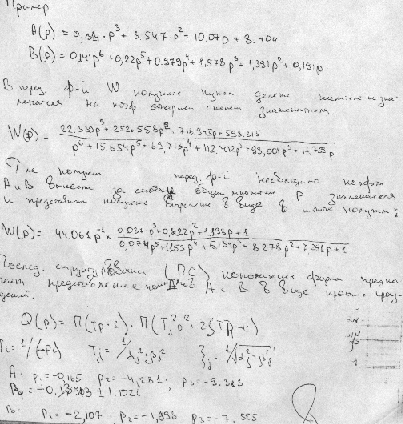
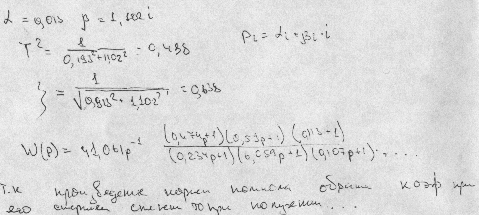
Последовательно структурированная конечная форма (ПФ) отличается от формы тем
А здесь щаз будет пример….думаю он нах. Не нужен, но если чё его можно отдельно распечатать……
Структурные преобразованья. Анализ теории управления.
Определение: Стр схема в ТУ наз графическое изображение математической модели автоматической системы в виде соединения звеньев.
Разбитие сложного динамического звена на ??????? элементарных не является чисто математическим приёмом. Любая реальная система математического управления может быть представлена в виде совокупности элементарных звеньев. Переход от реальных элементов к САУ их математическим моделям позволяют абстрогироваться от физических принципах построения системы поэтому структурная схема является основой универсальных методов анализа и синтеза САУ.
В структурных схемах динамические звенья связаны между собой через входные и выходные переменные.
?????? представлены стрелками динамические звенья прямоугольниками а математические изложения сигнала специальными символами.
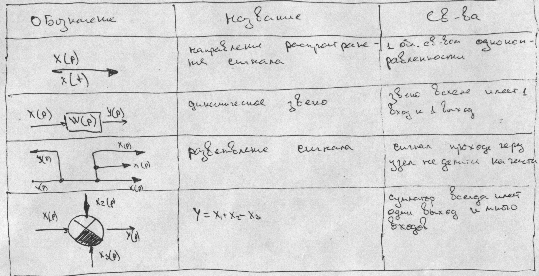
Основные типы соединений звеньев в структурных схемах.
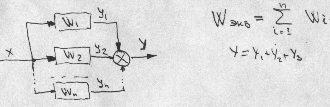
1. Параллельное соединение:
2.Последовательное:

3.Обратная связь:

Основные привила структурных преобразований.
Суть этих преобразований сводиться к
целенаправленному переносу элементов
структурных схем(звеньев, узлов,
сумматоров) друг через друга что бы
результирующая передаточная функция
не изменялась.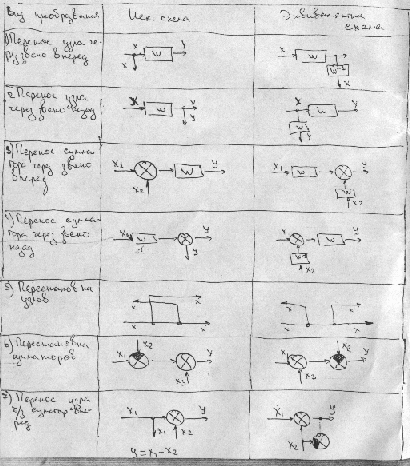

Применение 2-х последних преобразований не желательно. Лучше решать задачу алгебраическим способом то есть обозначить все выходы звеньев некоторыми переменными, выходы сумматоров выразить через эти переменные, составить систему алгебраических уравнений и решить её относительно входа и выхода.
Свойства эквивалентных преобразований.
-
Для исследованья многовыходных структурных схем преобразования для каждого выхода необходимо производить отдельно.
-
при исследовании много входных схем согласно принципу суперпозиций все входы кроме исследуемого считаются нулевыми.
Временные и частотные характеристики динамических звеньев и систем.
Временные характеристики. Понятие ??????? и стационарных САУ
Опр: Система называется дитермированной(хз как она пишется) если каждому входному сигналу X(t) отвечает один единственный сигнал y(t)
Опр: В недетерменированных системах входному сигналу могут соответствовать несколько выходных каждый из которых имеет определённую вероятность появиться.
Опр: Система называется стационарной если взаимосвязь между входом и выходом не зависит от времени в явном виде. В стационарной системе ??????? и вид выходного сигнала не зависит от момента приложения входного сигнала.
X(t)->Y(t)
X(t-V)->Y(t-V)Временные характеристики вводяться с целью изучения поведения автоматических систем во времянной области когда о свойствах системы можно судить на любом этапе управления но её реакции на поступающее воздействие.
Сложности:
-
Порядок уравнения в реальной системе достаточно высок.
-
Воздействия, входящее в правую часть дифференцированного уравнения являются обычно случайными функциями или сложными, поэтому для анализа динамической системы используют обычно специальные функции. Они являются простейшими аналитическими функциями, поэтому решение находится достаточно просто.
Специализированными функциями называют класс функций составляющие основы временного анализа объектов и систем управления. Каждая из специализированных функций и её производных являются непрерывными функциями времени при всех кроме одного действительных значений времени.
-
Функция единично ступенчатая

-
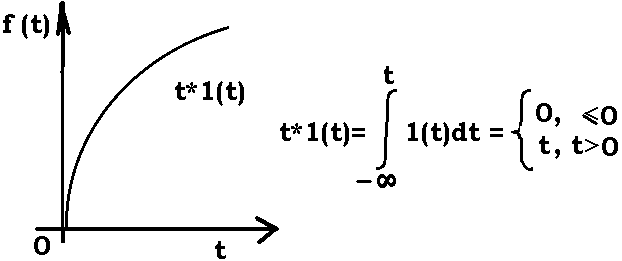
Линейно нарастающая функция
-
Параболическая функция

Продолжая многочисленное интегрирование можно получить функции 3-го и 4-го порядков, но самыми распространёнными являются данные.
Реакция системы на единичное ступенчатое воздействие называется переходной формой (характеристикой).
-
Дельта функция
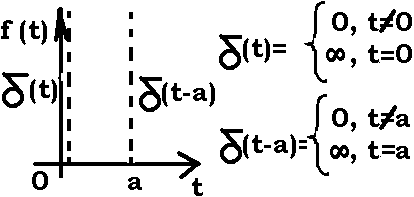
Функция Дирана, её свойства: 1. Импульс бесконечно большёй амплитуды 2. Импульс бесконечно малой длительности 3. Площадь импульса = «1».
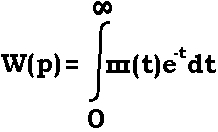
Определение: Функцию, описывающую реакцию системы на импульсное воздействие при нулевых начальных условиях называют импульсной переходной или весовой функцией. Обозначают – омега(t).
Определение: Весовая функция имеет фундаментальное значение для анализа автоматических систем. Если она известна, то определена вся информация о динамических свойствах объектов.
Определение: Передаточная функция – это изображение по Лапласу реакции динамического звена на дельту функции.
Временными характеристиками называют переходную и импульсную переходную характеристики.
Изображение по Лапласу некоторых функций.
|
Оригинал |
Дел(t) |
де(t-а) |
1(t) |
t*1(t) |
t^(n-1)*1(t) |
e^(-аль*t) |
sin(омега*t) |
1-е^(-аль*t) |
|
Изображение |
1 |
e^(-p*a) |
1/p |
1/p^2 |
(n-1)!/p^n |
1/(p+аль) |
омег/(р^2+омег^2) |
-аль/(p*(p+аль)) |
|
|
|
|
|
|
|
|
|
|
Временные характеристики типовых динамических звеньев.
