

Свободное и вынужденное движение
Пусть y(t)- сигнал на выходе устройства,g(t)– сигнал, подаваемый на его вход. Пусть работа устройства описывается в общем виде уравнением:
![]() .
.
Чтобы определить y(t)необходимо решить дифференциальное уравнение. Такое решение может быть записано в виде:
y(t) =yсвоб.(t) +yвын.(t),
где y своб (t)– решение однородного дифференциального уравнения:
![]() .
.
Такое уравнение определяет свободное движение или колебания. yвын.(t)есть частное решение рассматриваемого неоднородного дифференциального уравнения. Оно определяет вынужденные движения, обусловленные внешним воздействием.
Рассмотрим принцип суперпозиции, применяемый в проектировании сложных систем управления. Пусть на техническое устройство подается несколько внешних воздействий. Тогда для такого устройства, описываемого системой линейных дифференциальных уравнений, справедливо утверждение, что сигнал на выходе устройства равен сумме выходных сигналов, полученных при подаче на вход устройства одного воздействия при равенстве нулю всех остальных. Принцип наложения сигналов называется принципом суперпозиции. Рассмотрим систему автоматического управления с несколькими управляемыми параметрами, то есть многомерную, общая схема которой может быть представлена следующим образом:

В качестве математической модели такой системы может рассматриваться система алгебраических уравнений:
Yi (s) = Wi1(s) G1(s) + Wi2 (s) G2 (s) + . . .+ Wim (s) Gm(s).,
записаная в векторно-матричной форме:
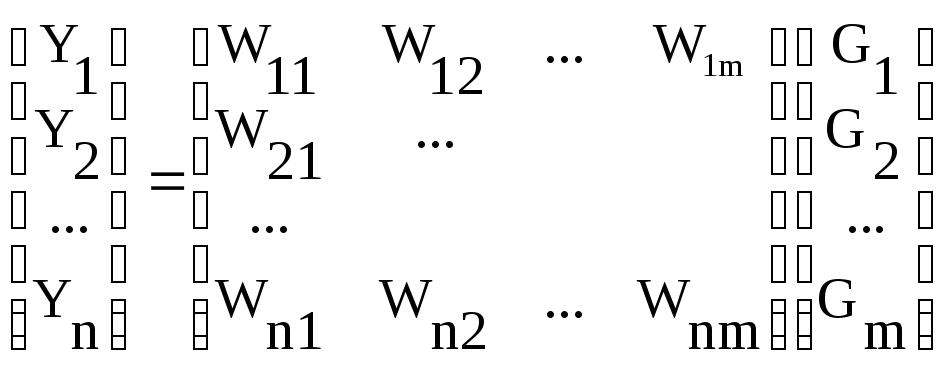 .
.
Если исследовать динамические свойства САУ при типовых режимах, то предполагается, что типовое воздействие одного вида подают на все входы одновременно, тогда выходной сигнал будет определяться по формуле:
Yi (s) = G(s) * (Wi1(s) + Wi2(s) + . . . + Wim(s)).
Сумма Wi1(s) + Wi2(s) + . . . +Wim(s) называется обобщенной передаточной функцией. Число обобщенных передаточных функций многомерной САУ определяется числом управляемых сигналов. Рассмотрим определение принципа суперпозиции через понятие оператора системы. ПустьА– оператор системы. Если для системы характерно выполнение условия:
 ,
,
то это свойство
линейности системы эквивалентно
выполнению принципа суперпозиции.
Отсюда можно сделать заключение, что
нелинейным называется любой оператор,
для которого принцип суперпозиции не
имеет места или справедлив только при
некоторых вполне определенных функциях
![]() и числах
и числах![]() .
Далее заметим, что запись вида:
.
Далее заметим, что запись вида:

выражает принцип суперпозиции в интегральной форме.
Характеристическое уравнение. Понятие корневого годографа
Передаточную функцию разомкнутой системы управления можно представить в виде:
![]()
Здесь k- числовой коэффициент, в который в качестве сомножителя входит коэффициент усиления сигнала в прямой цепи. Передаточная функция замкнутой системы управления с единичной отрицательной обратной связью определяется по формуле:
![]()
Уравнение B(s) + kA (s) = 0называется характеристическим. Его корни называются полюсами, а корни уравненияkA(s) = 0 называются нулями. Полюса и нули могут рассматриваться в качестве динамических характеристик наряду с переходными и частотными. При измененииkот0до бесконечности полюсы описывают в комплексной плоскости траектории, называемые корневым годографом, траектории могут иметь произвольную форму,определяемую уравнением динамики, например, гиперболу
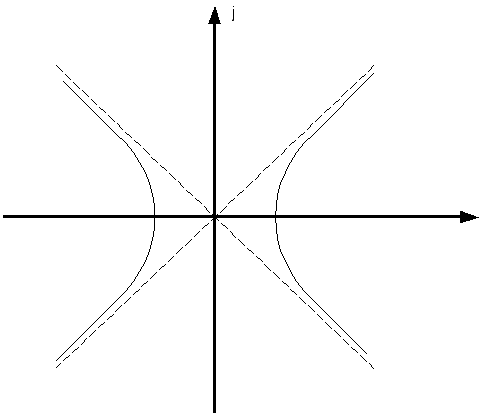
По движению полюсов вдоль траекторий судят о свойствах системы управления. Отметим несколько основных свойств корневого годографа:
корневой годограф симметричен относительно действительной оси;
действительная ось принадлежит корневому годографу;
число ветвей корневого годографа определяется степенью характеристического уравнения.
Основное аналитическое уравнение траектории корней имеет вид алгебраического уравнения:
 -
-
 .
.
Это уравнение
позволяет по задаваемому значению
![]() найти
найти![]() ,
и наоборот, то естьуравнение дает
возможность строить по точкам корневой
годограф. Здесь приняты следующие
обозначения:A(),B()- полиномыA(s)иB(s)соответственно
после подстановкиs = .
,
и наоборот, то естьуравнение дает
возможность строить по точкам корневой
годограф. Здесь приняты следующие
обозначения:A(),B()- полиномыA(s)иB(s)соответственно
после подстановкиs = .
![]() ,
,
![]() - производные этих полиномов. Для
многомерной системы управления число
характеристических уравнений будет
определяться числом управляемых
параметров. Если все каналы управления
связаны между собой, то характеристические
уравнения всех каналов будут одинаковые.
- производные этих полиномов. Для
многомерной системы управления число
характеристических уравнений будет
определяться числом управляемых
параметров. Если все каналы управления
связаны между собой, то характеристические
уравнения всех каналов будут одинаковые.