

Классификация звеньев. Типовые динамические звенья
Алгоритмические звенья, которые описываются обыкновенными дифференциальными уравнениями первого и второго порядка, получили название типовых динамических звеньев.
Типовые
динамические звенья являются основными
составными частями алгоритмических
структур непрерывных систем управления,
![]() знание
их характеристик существенно облегчает
анализ таких систем.
знание
их характеристик существенно облегчает
анализ таких систем.
Классификацию удобно осуществить, рассматривая различные частные формы дифференциального уравнения:
![]()
|
Звенья,
у которых а2![]() 0
и в1
0
и в1 ![]() 0
обладают статизмом , т.е. однозначной
связью между входной и выходной
переменными в статическом режиме. Звенья
– статические, или позиционные.
0
обладают статизмом , т.е. однозначной
связью между входной и выходной
переменными в статическом режиме. Звенья
– статические, или позиционные.
Звенья,
у которых 2 из трех коэффициентов а2![]() 0,
а1
0,
а1![]() 0,
а0
0,
а0![]() 0,
обладают инерционностью (замедлением).
0,
обладают инерционностью (замедлением).
У
звеньев 1,5,7 только 2 коэффициента
![]() 0.
Они являются простейшими, или элементарными.
Все остальные типовые звенья могут быть
образованы из элементарных путем
последовательного, параллельного и
встречно- параллельного соединения.
0.
Они являются простейшими, или элементарными.
Все остальные типовые звенья могут быть
образованы из элементарных путем
последовательного, параллельного и
встречно- параллельного соединения.
Апериодическое звено
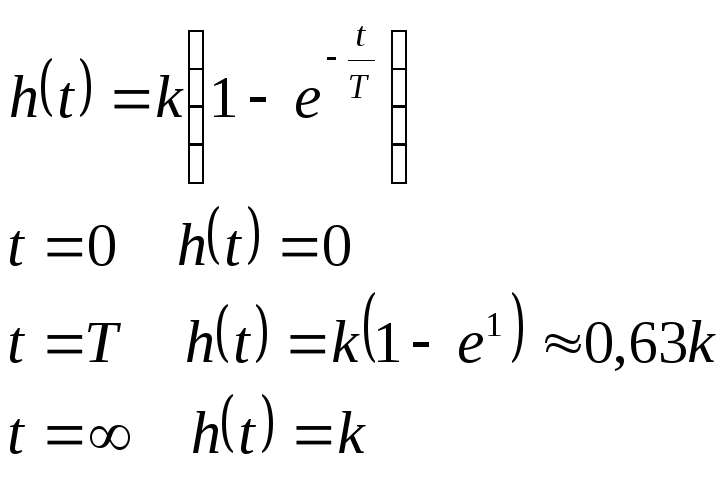
Динамика процесса описывается следующим уравнением:
![]()
где k передаточный коэффициент или коэффициент усиления, Т постоянная времени, характеризующая инерционность звена.
1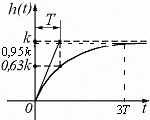 .
Переходная характеристика:
.
Переходная характеристика:
1)
![]()
2) В точке ноль строят касательную переходной характеристики, определяют точку пересечения с линией k. Абсцисса этой точки и есть постоянная времени.
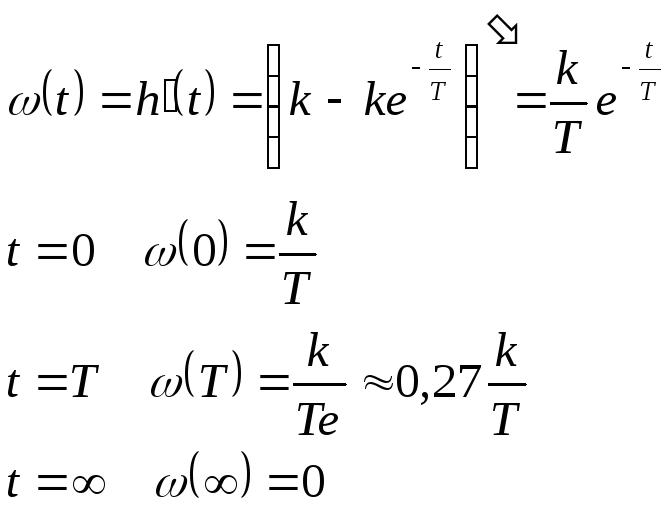
2. Импульсная переходная характеристика, или функция веса, звена может быть получена путем дифференцирования функции h(t):

3. Передаточная функция:
П
![]()

Структурная схема звена при этом будет выглядеть следующим образом:
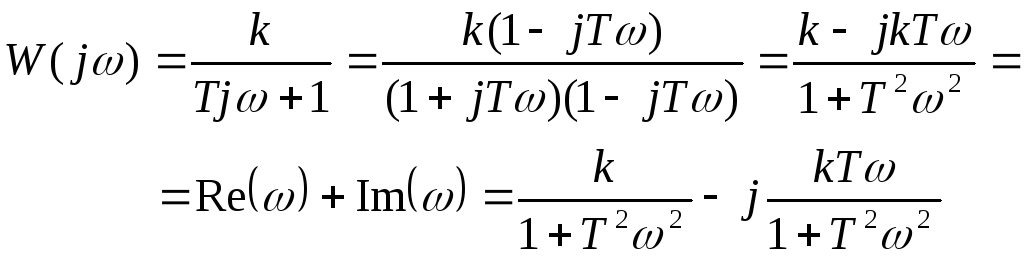
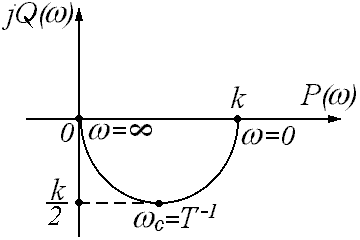
4. АФЧХ:
Подставляя в передаточную функцию p=j, получим амплитудно-фазо-частотную функцию:
5![]() .
АЧХ:
.
АЧХ:
![]()
График АЧХ строится по точкам:
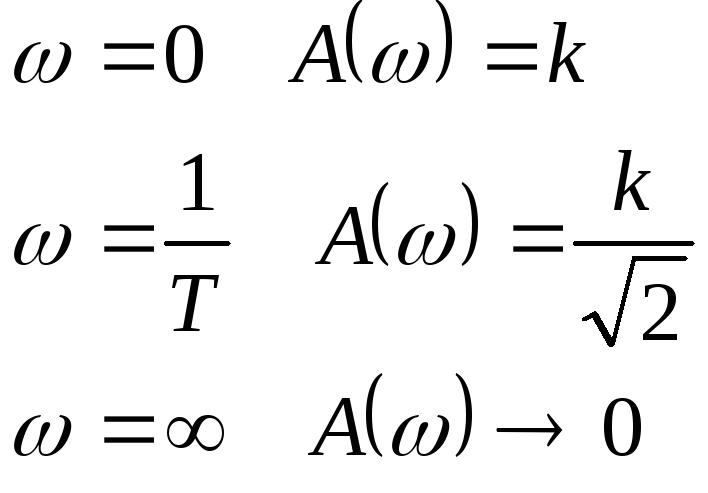

Здесь с – частота сопряжения.
Гармонические сигналы малой частоты ( <с) пропускаются звеном хорошо – с отношением амплитуд выходной и входной величин, близким к передаточному коэффициентуk. Сигналы большой частоты ( >с) плохо пропускаются звеном: отношение амплитуд существенно < коэффициентаk. Чем больше постоянная времениТ, т.е. чем больше инерционность звена, тем меньше АЧХ вытянута вдоль оси частот, или, темуже полоса пропускания частот.
Т.о. инерционное звено первого порядка по своим частотным свойствам является фильтром низкой частоты.
6.ФЧХ:
ФЧХ инерционного звена первого порядка равна:
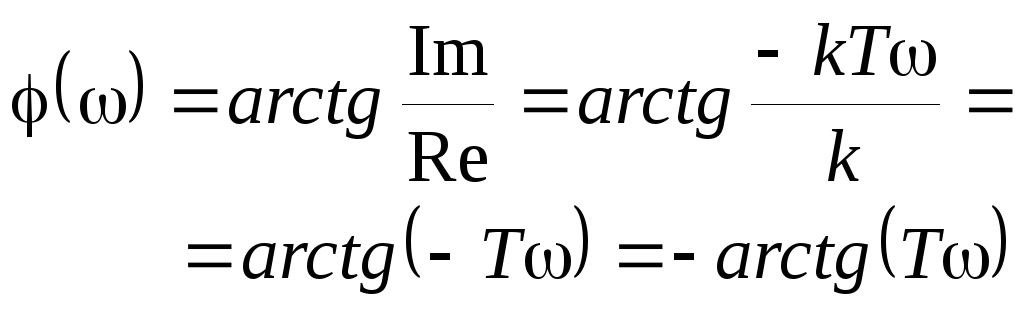
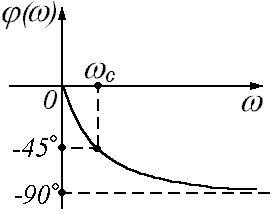

Чем больше частота входного сигнала, тем больше отставание по фазе выходной величины от входной. Максимально возможное отставание равно 900. При частотес=1/Тсдвиг фаз равен –450.
7.ЛАЧХ:
Рассмотрим теперь ЛАЧХ звена. Точная ЛАЧХ описывается выражением:
![]()
При построении ЛАЧХ апериодического звена прибегают к асимптотическим методам или, другими словами, строят асимптотический график ЛАЧХ.
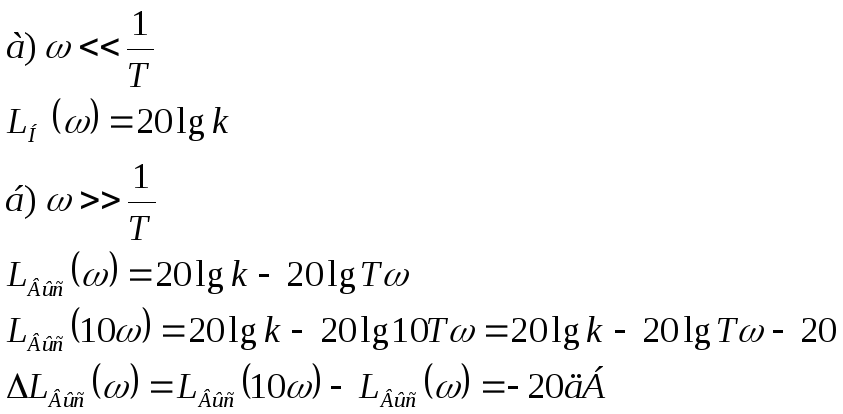
На втором участке наклон асимптотической ЛАЧХ составляет -20 дБ/дек.
Значение сопрягающей частоты wc, при которой пересекаются обе асимптоты, найдем из условия
![]()

Посмотрим, что будет при построении не асимптотической, а точной ЛАЧХ:

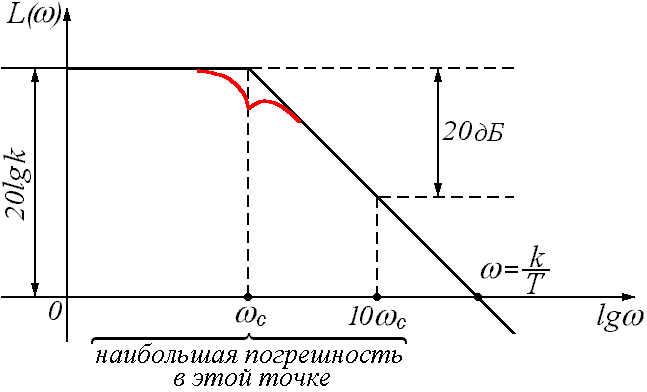
Точная
характеристика (ЛАЧХ) в точке среза
будет меньше асимптотической ЛАЧХ на
величину
![]() .
.