

Описание дискретных систем в терминах пространства состояния
В отличие от непрерывных систем при описании дискретных систем в терминах пространства состояния рассматриваются отдельно следующие моменты времени:
1. Момент замыкания ключей.
![]() -
время после замыкания ключей,
-
время после замыкания ключей,
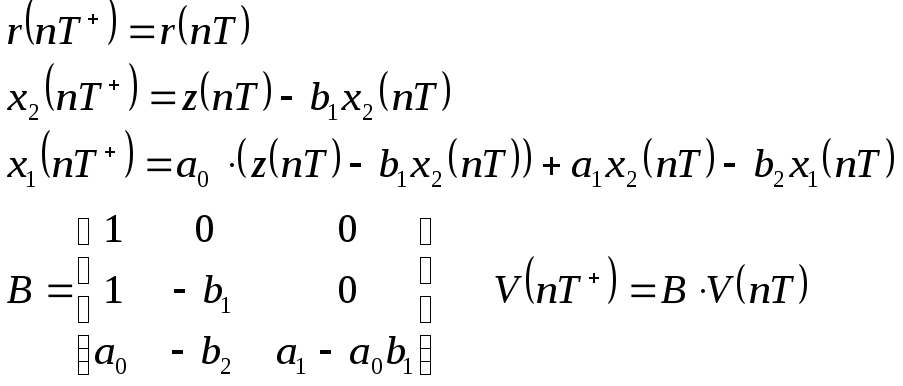
![]() ,
где В
– матрица ключей.
,
где В
– матрица ключей.
Описывается системой переходных состояния.
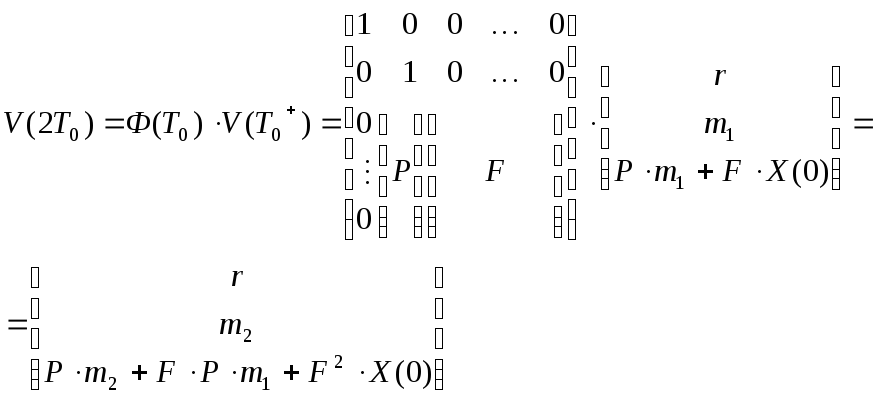
2. Момент между замыканиями ключей.
![]()
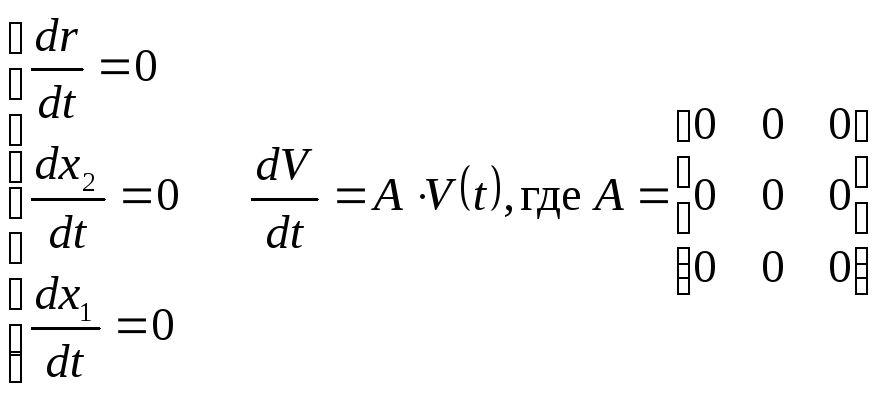
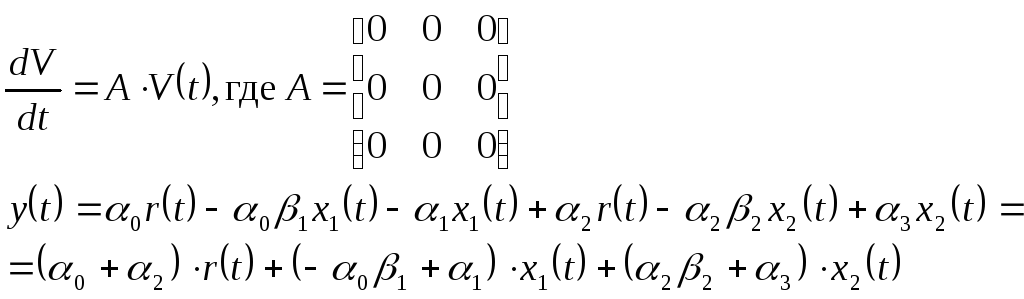
Поведение системы описывается системой дифференциальных уравнений:
![]() ,
где А
– матрица коэффициентов.
,
где А
– матрица коэффициентов.
Точно также, как и для непрерывных систем, структурная схема дискретных систем преобразуется в схемы переменных состояния. Схемы переменных состояния могут быть получены тремя способами: методом прямого, параллельного и последовательного программирования.
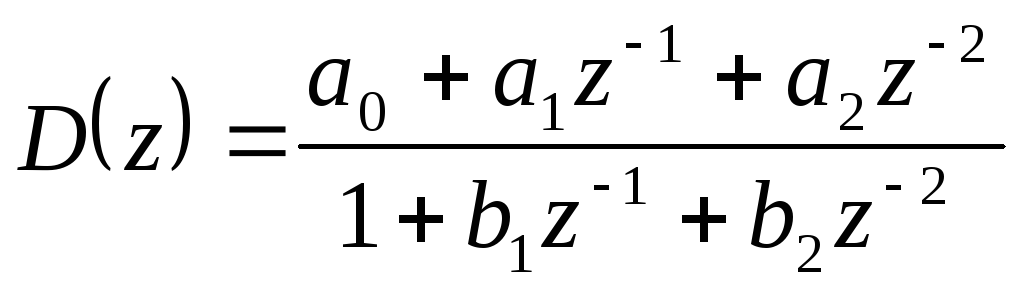
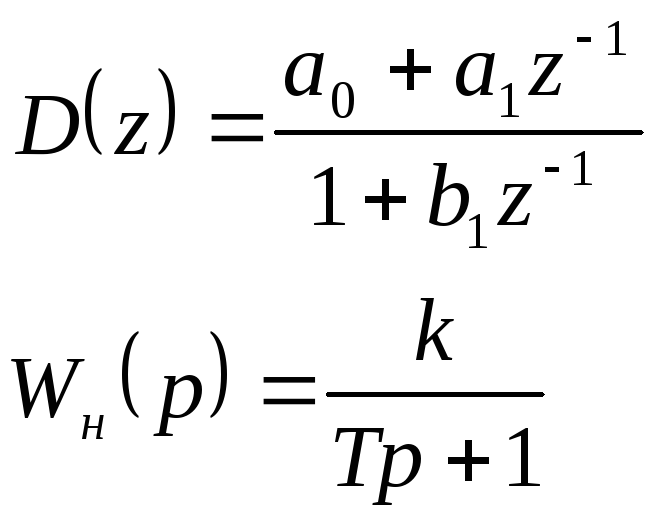
Рассмотрим все методы на примере системы второго порядка. Базовый элемент для дискретных систем выглядит следующим образом:
![]()
Метод прямого программирования
В

 .
.
Опишем дискретную систему в двух случаях.
1. В момент замыкания ключей:

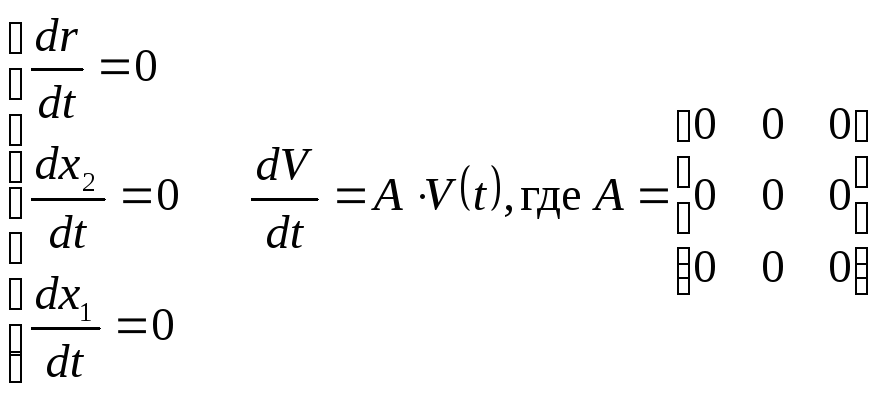
2. В момент между замыканиями ключей:
Метод параллельного программирования
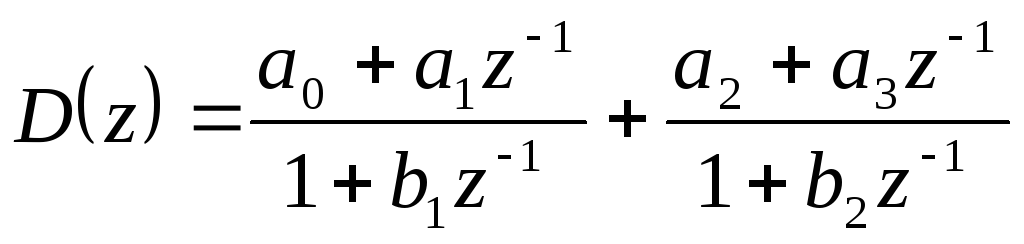
Дискретная передаточная функция представлена суммой дробно-рациональных выражений:
 .
.
1

2. В момент между замыканиями ключей:
Метод последовательного программирования
Дискретная передаточная функция представлена суммой дробно-рациональных выражений:

1. В момент замыкания ключей:
2. В момент между замыканиями ключей:
Метод последовательного программирования применяется если дискретная система представлена структурной схемой, состоящей из некоторых звеньев, каждое из которых может быть заменено СПС построенных методом прямого либо параллельного программирования.
Анализ дискретно-непрерывных систем методом
переходных состояния
Рассмотрим анализ дискретно-непрерывных систем на следующем примере.
![]()
Схема состояния такой системы будет иметь вид:
1

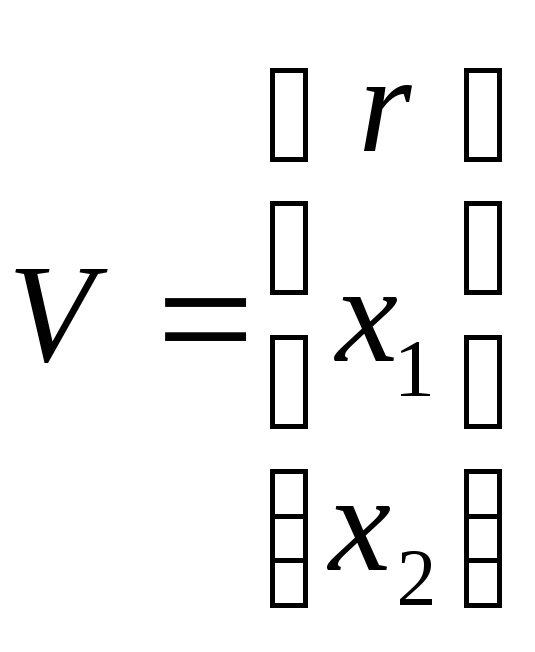
Выберем
вектор состояния -
 .
.
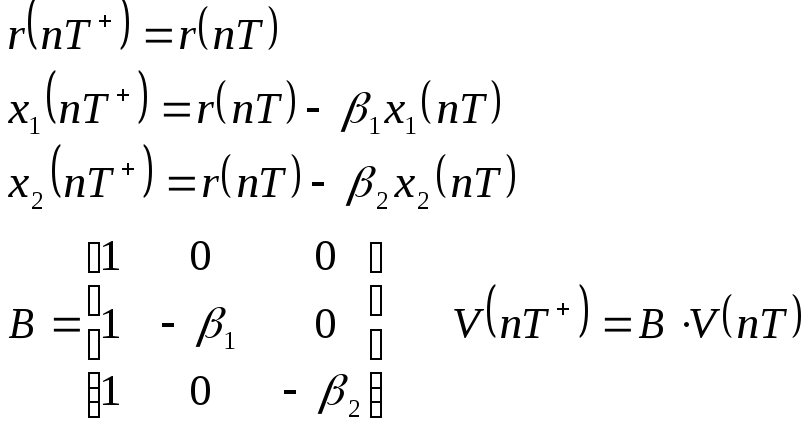
Для дискретной части:
![]()
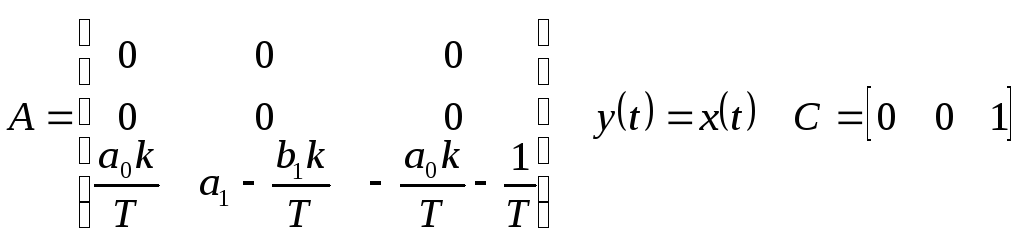
Для непрерывной части:
![]() ,
,
т.е. непрерывная часть на момент замыкания ключей не реагирует.
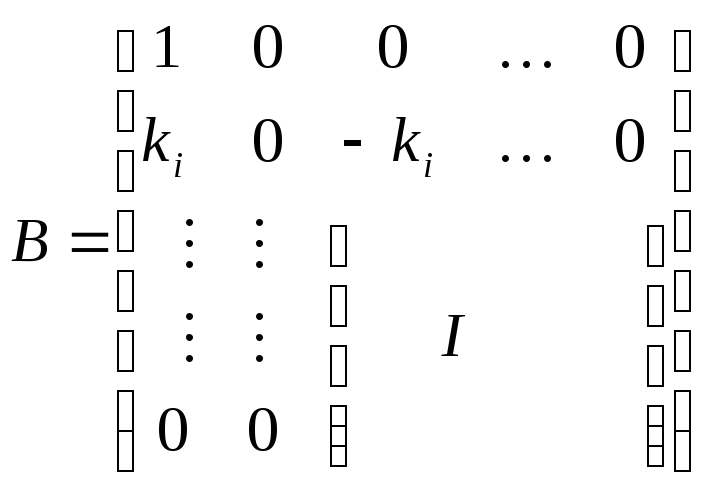
Матрица
ключей В
будет иметь вид -
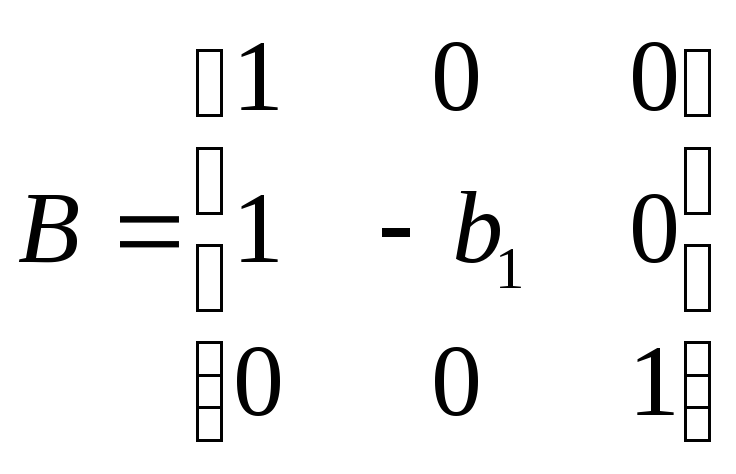 .
.
2. В момент между замыканиями ключей система описывается с помощью дифференциальных уравнений.
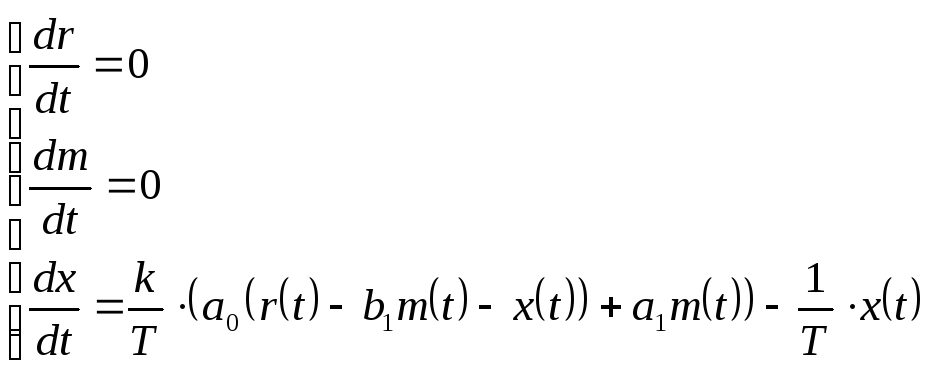
Матрица коэффициентов в данном случае будет иметь вид:
Поведение дискретной непрерывной системы описывается в разные моменты времени следующими уравнениями:
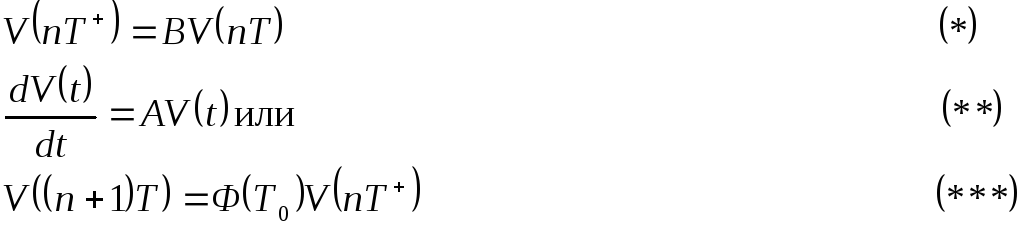
Если в уравнение (***) подставить выражение (*), то получим:
![]() ,
,
где Н(Т0) – включает в себя свойства как непрерывной, так и дискретной системы.
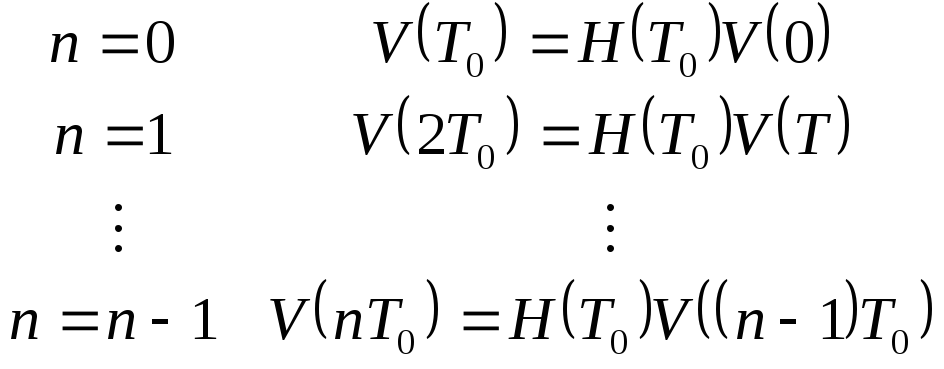
Тогда выражение для анализа дискретной непрерывной системы методом переходных состояний будет выглядеть следующим образом:
![]() .
.
Выбор Т0 осуществляется из теоремы Котельникова-Шенона, по формуле
![]() ,
где max
– максимальная частота в спектре
сигнала, Т0=1/2
–1/4 minTi
– выбирается из минимальной постоянной
времени.
,
где max
– максимальная частота в спектре
сигнала, Т0=1/2
–1/4 minTi
– выбирается из минимальной постоянной
времени.
Метод переменного коэффициента усиления.
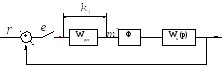
![]()
y=![]() -
управляемая величина;
-
управляемая величина;
m – управляющая последовательность цифрового регулятора;
e – ошибка управления.
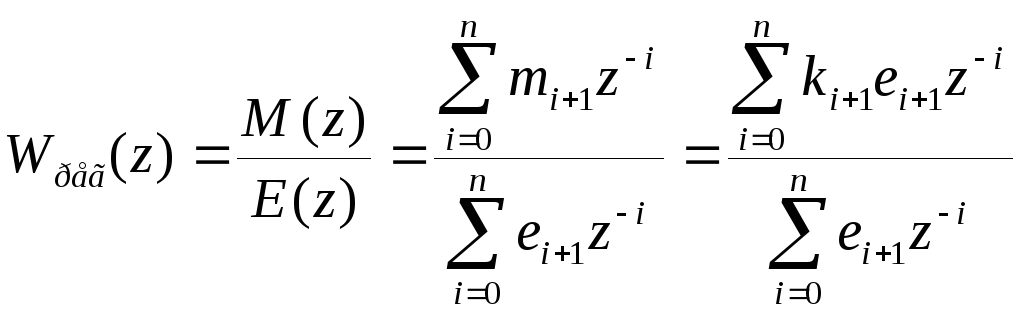
Цель синтеза сводится к определению передаточной функции:
Критерием
метода переменного коэффициента усиления
является быстродействие. Данный метод
обеспечивает быстродействие и время
переходного процесса
![]() (гдеn-
порядок объекта) без перерегулирования
(%=0).
(гдеn-
порядок объекта) без перерегулирования
(%=0).
Начальным условием для синтеза является описание объекта либо передаточной функцией, либо структурной схемой. Далее строится схема переменных состояний цифровой системы управления любым методом.
По схеме переменных состояний определяются матрица коэффициентов А и матрица выхода C. Затем выбирается Т0 и определяется расширенная матрица перехода Ф(Т0).
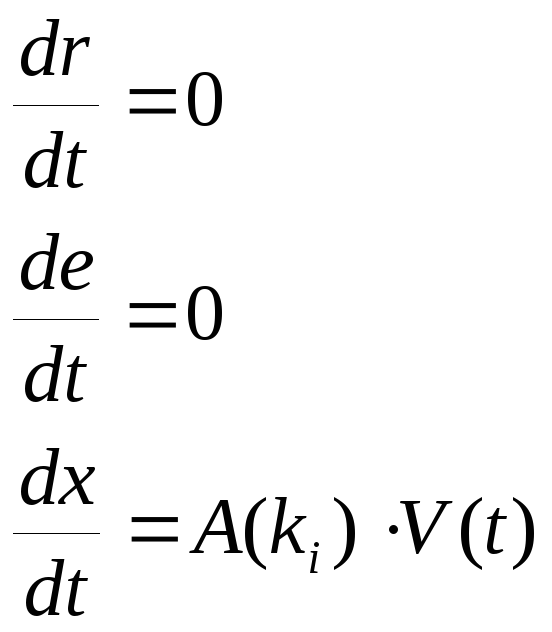
Для получения матрицы А можно в качестве одной из переменных выбрать либо величину сигнала ошибки e (см. ниже случай а), либо величину управляющего сигнала m (см. ниже случай б). Мы будем использовать случай б).
а).
 -
обобщенный вектор
По схеме переменных
состояний:
-
обобщенный вектор
По схеме переменных
состояний:
б).

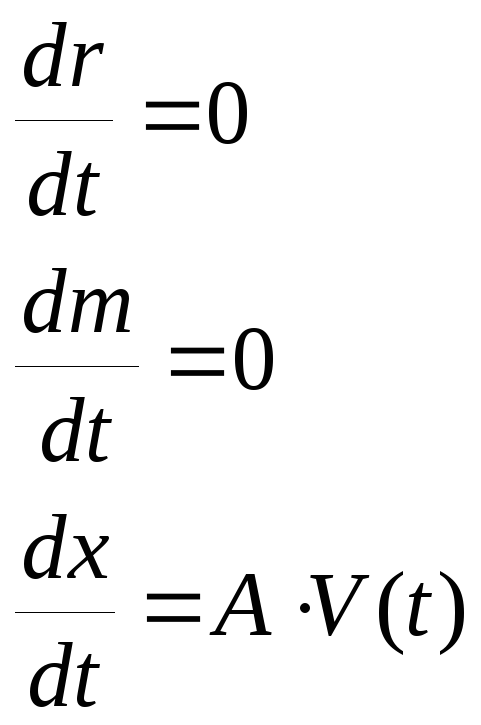
Матрица C определяется уравнением Y = CV(t)
Выбор интервала дискретности.
Для синтеза цифровой системы управления используют прикладное правило выбора Т0:
![]() ,
где
,
где
![]() - минимальная постоянная времени объекта.
- минимальная постоянная времени объекта.
Получение изображения матрицы перехода.
После выбора Т0 можно определить Ф(Т0).
Если
в качестве переменной выбран сигнал m,
то матрица А является числовой и при
расчёте расширенной матрицы перехода
Ф(Т0)
удобно воспользоваться методом разложения
в ряд
![]() ,
который реализован в пакете Matlab (команда
expm(M), где M – имя матрицы).
,
который реализован в пакете Matlab (команда
expm(M), где M – имя матрицы).
В полученной матрице Ф(Т0) выделяем матрицы Р и F.
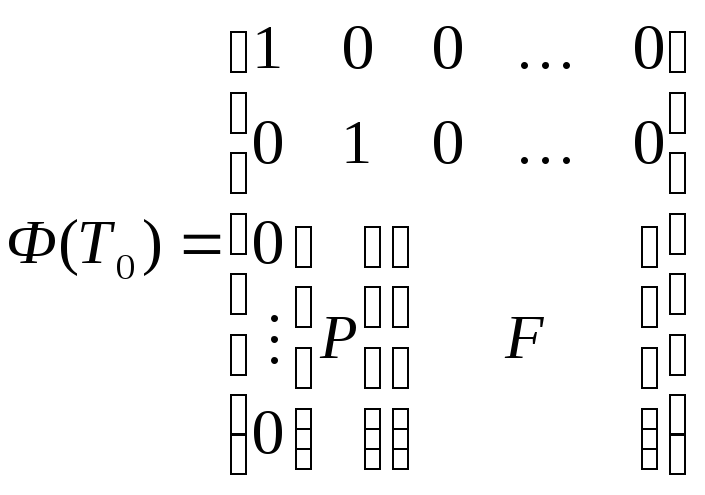
где Р – столбец из n-строк - определяет реакцию объекта на управляющую последовательность;
F - матрица размером n*n – матрица перехода непосредственно объекта.
Получение формулы для расчёта величин управляющих воздействий.
Поведение системы между замыканием ключей можно описать:
![]()
где
![]()

![]()
![]()
Рассмотрим поведение системы от момента времени t=0 до момента t=nT0.
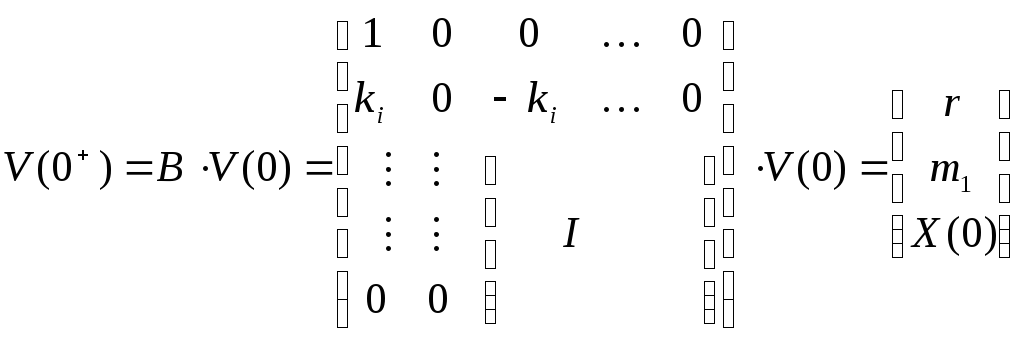
Между замыканием ключей:
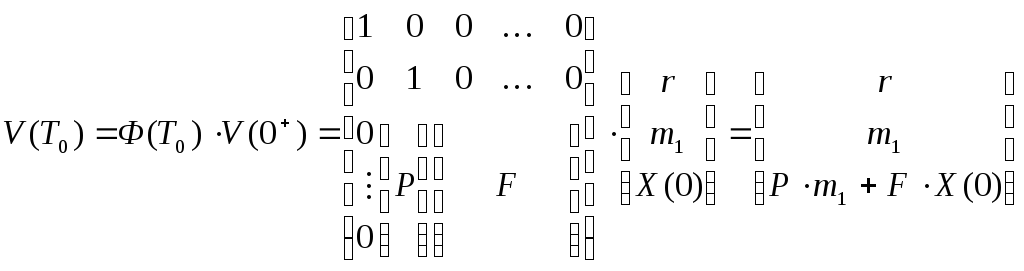
В момент замыкания ключей:
![]()
В момент nT0:

Из
этого уравнения можно получить значения
управляющих сигналов, задавшись вектором
![]() .
.
Определение
![]() :
:
![]()
 -
по схеме, учитывая, что на момент окончания
переходного процесса выход системы
должен быть равен её входу, а входы
интеграторов должны быть равными нулю.
Это условие можно описать следующими
векторными уравнениями:
-
по схеме, учитывая, что на момент окончания
переходного процесса выход системы
должен быть равен её входу, а входы
интеграторов должны быть равными нулю.
Это условие можно описать следующими
векторными уравнениями:
Определение величин управляющих воздействий:
Управляющие
воздействия
![]() находятся из уравнения
находятся из уравнения
![]()
Остальные величины управляющих воздействий – из условия:
![]() (*)
(*)
Определение величин ошибок:
С учётом схемы, из уравнений, вида:
![]()
для нашего примера:
![]()
![]()
где р1 – первый элемент вектора Р;
F1 – первая строка матрицы F.
![]()
![]()
![]()
![]() (**)
(**)
Определение дискретной передаточной функции регулятора.
После нахождения последовательностей управляющих сигналов и ошибок, можем записать дискретную передаточную функция регулятора:


С учётом уравнений (*) и (**) получаем:

где
![]() ,
,![]() ,
,![]()
![]() ,
,
![]() ,
,![]() .
.