

Математическое описание сау
Глубокий анализ процессов, происходящих в системах, и эффективное решение задач расчета и проектирования САУ возможны лишь с применением языка и методов математики. Причём, первым этапом при исследовании или конструировании САУ является составление математического описания (математической модели) её элементов и системы в целом.
Составление математического описания состоит из следующих последовательных процедур:
Принятия исходных допущений
Выбор выходных и входных переменных
Выбор систем отсчёта для каждой переменной
Применение физического принципа, отражающего в математической форме закономерности преобразования энергии или вещества.
Наиболее распространённой формой описания передаточных свойств системы являются обыкновенные дифференциальные уравнения.
Уравнения динамики и статики
В общем случае звенья и системы описывают нелинейными дифференциальными уравнениями произвольного порядка.
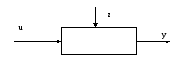
Звено можно описать дифференциальным уравнением второго порядка
![]()
где
y – выходная величина,
u, z- входные величины,
![]() -
первые производные по времени,
-
первые производные по времени,
![]() -
вторая производная по времени.
-
вторая производная по времени.
Это уравнение, описывающее процессы в звене при произвольных входных воздействиях, называется уравнением динамики.
Пусть при постоянных входных величинах u=u0 и z=z0 процесс в звене с течением времени установится: выходная величина y=y0. Тогда уравнение примет вид
![]()
Это уравнение описывает статический (установившийся) режим, его называют уравнением статики.
Статический режим можно описать графически.
Статическая характеристика – это зависимость выходной величины от входной в статическом режиме (воздействие u и возмущение z постоянны во времени, тогда управляемая величина Y = f(U,Z)).
Линеаризация
Во многих случаях нелинейные дифференциальные уравнения можно линеаризовать, т.е. заменить исходные нелинейные уравнения линейными, приблизительно описывающими процессы в системе.
Линеаризацию гладких статических характеристик можно осуществить либо по методу касательной, либо по методу секущей.
Пусть дана нелинейная характеристика:
y





Y0
x
X0
Исходную
нелинейную зависимость
![]() можно разложить в ряд Тейлора в
окрестностях точки установившегося
режима, и, отбросив члены ряда выше
первого порядка, получить следующую
приближенную зависимость:
можно разложить в ряд Тейлора в
окрестностях точки установившегося
режима, и, отбросив члены ряда выше
первого порядка, получить следующую
приближенную зависимость:
![]() ,
,
где
![]() - значение производной функции
- значение производной функции![]() поx
при подстановке в выражение этой
производной x
= x0.
поx
при подстановке в выражение этой
производной x
= x0.
При расчете автоматических систем удобно линейные статические характеристики рассматривать в отклонениях переменных y и x от их значений y0 и x0.
Тогда это уравнение можно переписать в таком окончательном виде:
![]()
![]()
![]()
![]()
Произведенная линеаризация (методом касательных) имеет простую графическую интерпретацию: действительная нелинейная характеристика заменяется касательной к ней в точке, соответствующей установившемуся режиму. Коэффициент к равен тангенсу угла наклона этой касательной относительно оси абсцисс.
В более общем случае звено описывается нелинейным уравнением, включающим производные по времени от входных и выходных величин:
![]()
После разложения нелинейной функции в левой части уравнения в ряд Тейлора в точке установившегося режима, получим следующее линейное дифференциальное уравнение для приращений переменных:
![]()
Линеаризации применяется только для малых отклонений, то есть полученные в результате линеаризации уравнения пригодны для приближенного исследования только таких режимов в системах, при которых переменные величины на входе звеньев претерпевают достаточно малые отклонения от установившихся значений. Во-вторых, линеаризация применима только к непрерывно дифференцируемым нелинейностям.