

Векторно-матричная форма описания многомерных элементов
Современные системы управления часто содержат элементы с несколькими входными и несколькими выходными переменными. Такие элементы называются многомерными.
Многомерными элементами являются прежде всего сами объекты управления.
Многомерными могут быть и другие части систем управления – например, сложные управляющие устройства в виде микрокомпьютеров, выполняющих роль многоканальных генераторов.
Выходными переменными обычно являются реальные физические величины, которые, как правило, поддаются измерению. Однако, в качестве выходных переменных могут фигурировать некоторые абстрактные переменные, например, производные от реальных выходных переменных, не имеющие конкретного физического смысла, и тогда даже элемент с одним входом и одним выходом (но описываемый дифференциальным уравнением выше первого порядка) может рассматриваться как многомерный.
Математическое описание передаточных свойств любых линейных многомерных элементов может быть осуществлено в двух различных видах:
1). при помощи рассмотренных нами динамических характеристик (дифференциальных уравнений, временных, передаточных и частотных функций), записанных для реальных входных и выходных переменных (способ описания ВХОД-ВЫХОД (ВВ));
2). при помощи дифференциальных уравнений в форме Коши, записанных для абстрактных выходных переменных (переменных состояния) (способ описания в переменных состояния (ПС)).
Способ описания вход-выход
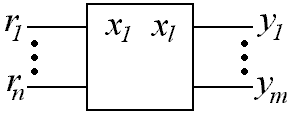
Пусть имеется многомерный объект с m входными переменными и n измеряемыми выходными переменными.
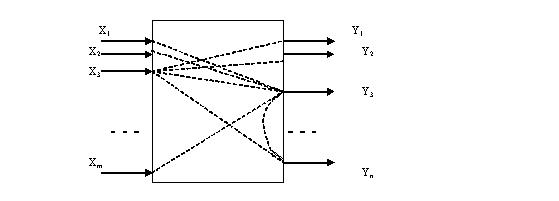
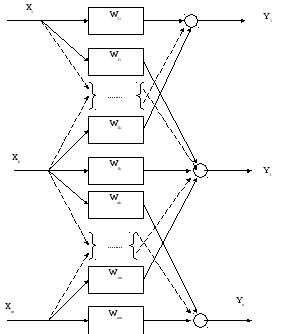
В общем случае каждая входная переменная связана с каждой выходной переменной. Если взаимосвязи по всем каналам линейны (линеаризованы), то в общем случае элемент можно описать следующей системой:
![]() ,
,
где
![]() - входной и выходной дифференциальные
операторы.
- входной и выходной дифференциальные
операторы.
То же в виде векторного уравнения:
![]()
где
![]() - векторы выходных и входных переменных
- векторы выходных и входных переменных ,
, ,
,
![]() -
матрицы операторов
-
матрицы операторов
![]()
nxn nxm
Если начальные условия нулевые, то в изображениях по Лапласу
![]()
![]()
Теперь можно определить матрицу передаточных функций (передаточную матрицу) элемента:
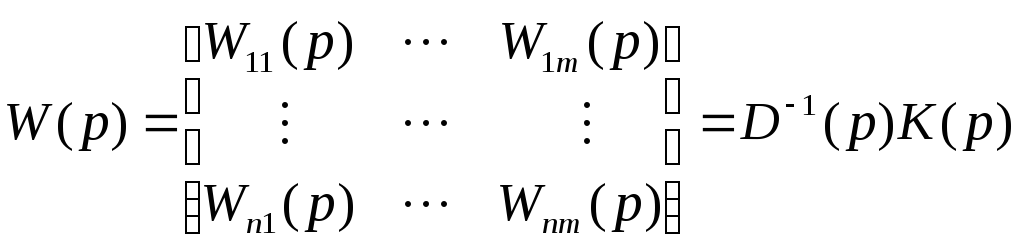
Элементы
этой матрицы представляют собой
передаточные функции
![]() по отдельным каналам
по отдельным каналам![]() .
Если
.
Если![]() диагональная, то
диагональная, то![]() находят просто, пользуясь определением
передаточной функции:
находят просто, пользуясь определением
передаточной функции:![]() .
.
Тогда систему можно описать с помощью векторного операторного уравнения
![]()
и первоначальную схему заменить другой:
Описание сау методом пространства состояния
Состоянием САУ называется та минимальная информация об объекте, которая позволяет спрогнозировать поведение системы при известных задающих воздействиях.
С точки зрения ТАУ, объект представляет собой черный ящик, характеризующийся рядом координат.
С
Векторное пространство входа
 определяет входные воздействия на
объект (в общем случае - и управляющие,
и помехи, и нагрузку).
определяет входные воздействия на
объект (в общем случае - и управляющие,
и помехи, и нагрузку).Векторное пространство внутреннего состояния
 определяет реакцию системы на входное
воздействие.
определяет реакцию системы на входное
воздействие.Векторное пространство выхода
 определяется выходными переменными.
определяется выходными переменными.
Совокупность этих векторов определяет состояние системы (пространство состояния).
![]() мерное
пространство, координатами которого
служат переменные состояния
мерное
пространство, координатами которого
служат переменные состояния
![]() ,
называется пространством состояния, а
рассматриваемый способ описания –
методом пространства состояний.
,
называется пространством состояния, а
рассматриваемый способ описания –
методом пространства состояний.
Для непрерывных линейных систем динамика и статика объекта описываются следующими векторными уравнениями:

где
![]() - матрица
коэффициентов САУ;
- матрица
коэффициентов САУ;
![]() -
матрица управления (входа) САУ; (не
рассматриваем возмущение)
-
матрица управления (входа) САУ; (не
рассматриваем возмущение)
![]() матрицы
постоянных коэффициентов, зависят от
конструктивных параметров объекта.
матрицы
постоянных коэффициентов, зависят от
конструктивных параметров объекта.
![]() -
матрица наблюдения (выхода) САУ;
-
матрица наблюдения (выхода) САУ;
![]() -
матрица обхода САУ.
-
матрица обхода САУ.
![]()
![]() -
матрицы постоянных коэффициентов,
характеризующие безынерционное влияние
переменных состояния и входных воздействий
на выход объекта.
-
матрицы постоянных коэффициентов,
характеризующие безынерционное влияние
переменных состояния и входных воздействий
на выход объекта.
Данное описание позволяет представить все стороны САУ:
Первое уравнение описывает динамику САУ, называется уравнением состояния;
Второе уравнение описывает статику САУ, называется уравнением выхода (наблюдения), это уравнение связывает переменные состояния и входные воздействия с выходными (наблюдаемыми) переменными.
Модели объекта, записанной при помощи переменных состояния в виде уравнений (*), соответствует алгоритмическая схема:
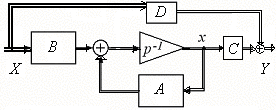
В
звене, стоящем между
![]() и
и![]() ,
выполняется операция
,
выполняется операция
![]() ,
где
,
где
![]() -
оператор интегрирования,
-
оператор интегрирования,
![]() - единичная матрица.
- единичная матрица.
Из уравнений состояния и выхода может быть получено следующее матричное уравнение статики многомерного линейного объекта:
![]() ,
,
где
![]() - матрица передаточных коэффициентов
объекта.
- матрица передаточных коэффициентов
объекта.
На практике бывает удобней объединить вектор входа и внутреннего состояния в один:
![]() -
обобщенный вектор состояния.
-
обобщенный вектор состояния.
В итоге получим систему уравнений:
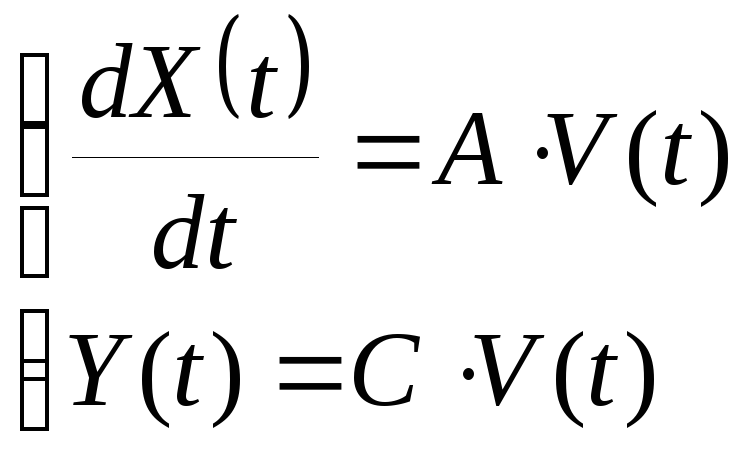
Тогда систему (*) можно представить в виде:

В
пространстве состояния в качестве
графического изображения системы
предлагают специальные структурные
схемы - схемы
переменных состояний,
которые позволяют легко получить матрицы
![]() .
.