

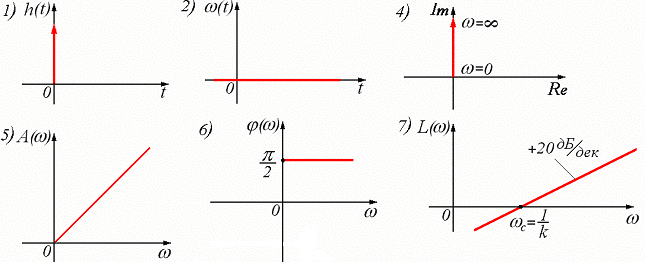
Реальное интегрирующее звено
Динамика процесса в таком звене описывается следующим уравнением:
![]() ,
,
где k – коэффициент усиления.
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция реального интегрирующего звена:
![]()
![]()
![]()
Реальное интегрирующее звено представляет собой последовательное соединение идеального интегрирующего звена и апериодического.
4. АФЧХ:

5. АЧХ:
![]()
6. ФЧХ:
![]()
7. ЛАЧХ:
![]()
С
![]()
Примером может служить электродвигатель постоянного тока, в котором управляемая величина – поворот вала двигателя.
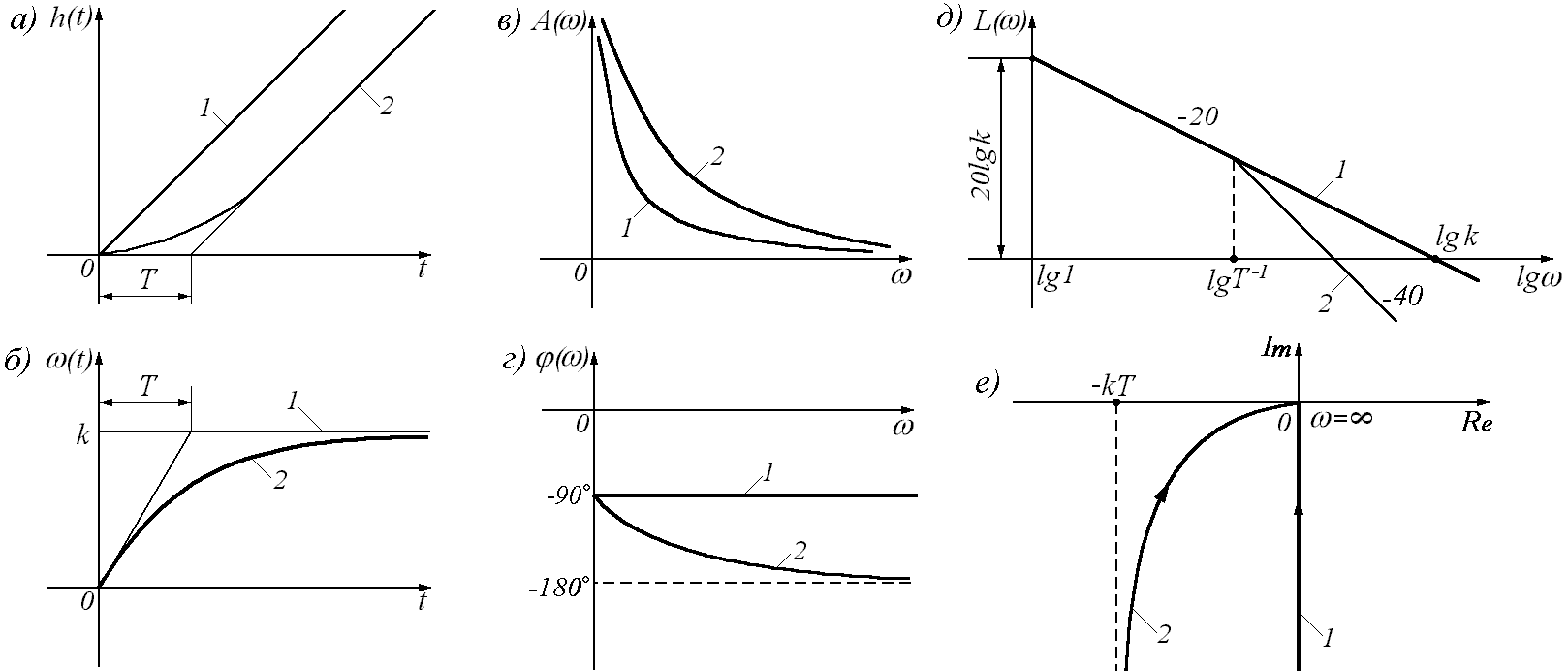
Общие свойства интегрирующих звеньев
После подачи на вход ступенчатого воздействия, выходная переменная y(t) неограниченно возрастает и по окончании ПП изменяется по линейному закону
![]()
При
снятии входного воздействия выходная
переменная сохраняет достигнутое
значение
![]() интегрирующие
звенья можно использовать в качестве
запоминающих элементов.
интегрирующие
звенья можно использовать в качестве
запоминающих элементов.
Передаточный коэффициент звена связан с передаточной функцией соотношением
![]()
![]()
![]()
Звенья также являются фильтрами низкой частоты
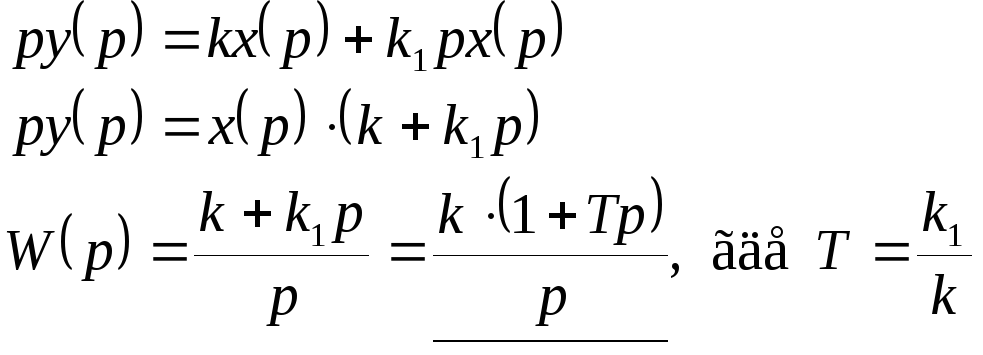
Изодромное интегрирующее звено
Динамика процесса описывается следующим уравнением:
![]() ,
,
здесь k и k1 – коэффициенты усиления.
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция:
4. АФЧХ:
![]()
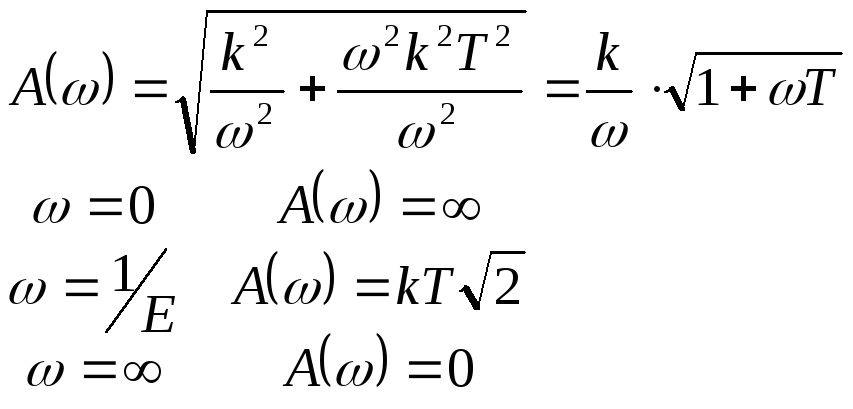
5. АЧХ:
6. ФЧХ:
![]()
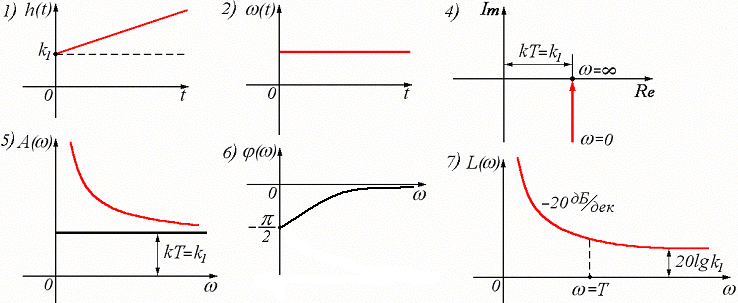 7.
ЛАЧХ:
7.
ЛАЧХ:
![]()
С
![]()
Идеальное дифференцирующее звено
Динамика процесса в таком звене описывается уравнением:
![]()
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:

3. Передаточная функция:

4. АФЧХ:
![]()
совпадает с положительной частью мнимой оси.
5. АЧХ:
![]()
показывает: чем больше частота входного сигнала, тем больше амплитуда выходного сигнала. Эта особенность дифференцирующих звеньев вытекает непосредственно из основного уравнения: чем быстрее изменяется во времени сигнал x(t), тем больше его производная в правой части и выходной сигнал y(t).
6. ФЧХ:
Сдвиг фаз, создаваемый идеальным дифференцирующим звеном, на всех частотах одинаков и равен
![]()
7. ЛАЧХ звена:
![]()
-
![]() .
.
С
![]()
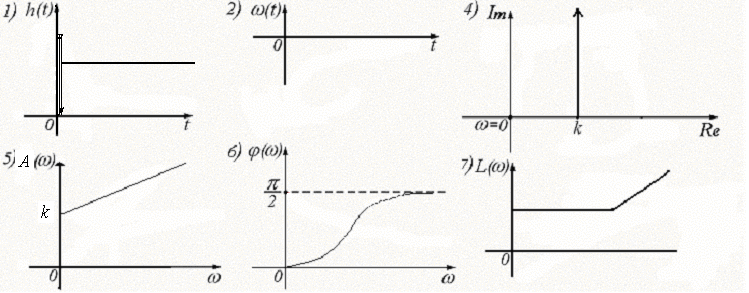
Реальное дифференцирующее звено
Динамика дифференцирующего звена представлена уравнением
![]()
1. Переходная характеристика:
График меняется скачком.
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция:
4. АФЧХ:
![]()
5. АЧХ:
![]()
6. ФЧХ:
![]()
7. ЛАЧХ:
![]()
С

![]()
Форсирующее звено
Динамика форсирующего звена представлена уравнением
![]()
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция:
![]()
Можно представить как параллельное соединение безынерционного и идеального дифференцирующего звеньев.
4. АФЧХ:
![]()
5. АЧХ:
![]()
6. ФЧХ:
![]()
7. ЛАЧХ:
![]()
Также как и дифференцирующее звено, форсирующее звено в идеальном виде не может быть реализовано. В реальных форсирующих устройствах всегда имеются малые параметры, создающие инерционность.
Общие свойства дифференцирующих звеньев
При подаче на вход ступенчатого воздействия, на выходе возникает большой кратковременный импульс, а затем выход = 0.
Дифференцирующие звенья в статике не передают входной сигнал
![]()
![]()
![]()
Звенья являются фильтрами высокой частоты, вносят положительные фазовые сдвиги.
Реальное форсирующее звено (упругое)
Динамика упругого звена представлена уравнением
![]()
Передаточная функция
![]()
Существенным
параметром данного звена является
коэффициент![]() .
.
Если
![]() ,
то звено подобно апериодическому,
,
то звено подобно апериодическому,
если![]() ,
то звено подобно реальному дифференциальному
звену.
,
то звено подобно реальному дифференциальному
звену.
Форсирующее звено второго порядка
Передаточная функция
![]()
Если
![]() ,
то звено не относится к числу типовых,
его можно представить как последовательное
соединение двух форсирующих звеньев
первого порядка.
,
то звено не относится к числу типовых,
его можно представить как последовательное
соединение двух форсирующих звеньев
первого порядка.
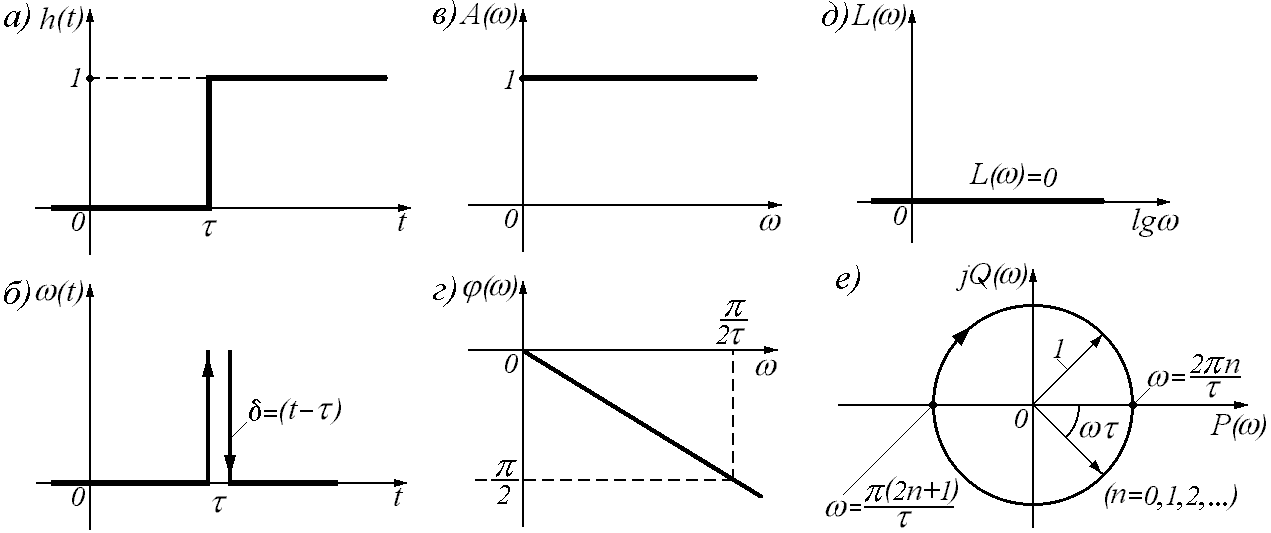
Звено чистого запаздывания
Примеры - конвейеры, трубопроводы.
Звеном чистого запаздывания называется такое звено, выходная величина которого полностью повторяет входную величину, но со сдвигом во времени на величину (время запаздывания).
Д

![]() ,
,
где - длительность запаздывания.
1. Переходная характеристика:
![]()
2. Импульсная переходная характеристика:
![]()
3. Передаточная функция звена:
![]()
4. АФЧХ:
![]()
представляет собой окружность с центром в начале координат и радиусом, равным единице.
5. АЧХ:
![]()
6. ФЧХ:
![]()
7
![]()
С
![]()
Звенья запаздывания в большинстве случаев ухудшают устойчивость систем и делают их трудноуправляемыми.
Если
ЗЗ входит в контур системы, то
характеристическое уравнение системы
будет уже не простым, а трансцендентным.
Решение и анализ трансцендентных
уравнений связаны с большими
трудностями![]() часто
в практических расчетах трансцендентную
передаточную функцию раскладывают в
ряд Пада и, учитывая только 2 или 3 члена
ряда, приближенно заменяют дробно-рациональной
функцией:
часто
в практических расчетах трансцендентную
передаточную функцию раскладывают в
ряд Пада и, учитывая только 2 или 3 члена
ряда, приближенно заменяют дробно-рациональной
функцией:
![]()
Другим
возможным способом аппроксимации ЗЗ
является его представление в виде
последовательного соединения nинерционных звеньев первого порядка с
постоянной времени![]()

Чем больше n, тем точнее аппроксимация.