

193
TCS предупреждает об отклонениях от маршрута, выходящих за заданный предел, а также о подходе к точке поворота, чтобы судоводитель мог заблаговременно подготовиться к маневрированию.
Сигнал об изменении |
Next Leg |
курса подается за 60 с. |
|
до прихода на WOL |
|
|
WOL |
WOL |
|
Рис. 5.34. Использование режима WOL при |
|
плавании по маршруту |
|
При нарушении нормального выполнения задачи автоматической проводки TCS подает тревожный сигнал, отключает эту функцию и переводит АР в режим стабилизации курса. Когда нарушение происходит при плавании по отрезку маршрута, АР переключается на удержание курса, соответствующего направлению активного отрезка пути. Если же нарушение функции управления возникает во время осуществления поворота, то его выполнение доводится до конца, после чего АР переводится в режим стабилизации курса, соответствующего направлению нового отрезка пути.
5.7. Информационная поддержка при маневрировании
Для применения в ECDIS, IECDIS, ECS, PPU ряд компаний разработали программные продукты для облегчения капитанам и лоцманам проводку и маневрирование судна в ограниченных водах. Среди этих программных продуктов могут быть выделены: определители траекторий планируемых маневров; предикторы движения корпуса судна; средства информационной поддержки при швартовке, при входе в шлюзы и доки и ряд других. В названных программных продуктах используются математические модели динамики судна разной сложности, как упрощенные аналитические, так и в виде дифференциальных уравнений. Алгебраические модели не всегда позволяют достаточно точно отразить процессы маневрирования судов, особенно крупнотоннажных. Наиболее эффективными в этом отношении являются системы дифференциальных уравнений. Они могут быть разной

194
сложности, линейными или нелинейными, независимыми и взаимосвязанными. Реализуются они в компьютерах в виде разностных схем, обеспечивающих численное интегрирование этих уравнений с малым шагом в ускоренном времени. Такие модели динамики судна называются разностными имитационными. Трудность их использования состоит в необходимости обеспечения их адекватности движению каждого из конкретных судов. Поэтому либо в программном обеспечении ECDIS должна быть программа для получения коэффициентов этой модели по набору параметров корпуса, винтов, рулей, двигателей судна, а также результатам его маневренных испытаний; или такая модель должна получаться на берегу.
5.7.1. Получение траекторий маневра
Обычно в ECDIS для нахождения траекторий маневров применяют упрощенные аналитические модели движения судна. Так, например, в ECDIS «NS4000» траектория поворота судна представляется сочетанием прямолинейного отрезка АМ, отражающего запаздывание в реакции судна на перекладку руля, с дугой окружности радиусом, равным половине
тактического диаметра ( DT ) циркуляции для заданной перекладки руля (рис.
5.35, где θ - угол поворота). Для выполнения прогноза поворота необходимо задать: новый курс, радиус поворота судна; расстояние от положения судна до точки WOP начала выполнения маневра; дистанцию от WOP до начала движения по окружности. Пример прогноза маневра курсом в ECDIS «NS4000» показан на рис. 5.36.
θ |
|
B |
|
P |
|
Дуга окружности |
|
с радиусом DT/2 |
|
M |
|
A (WOP) |
|
Рис. 5.35. Один из способов |
Рис. 5.36. Прогноз изменения |
представления траектории поворота |
курса в ECDIS «NS4000» |
Уже нашли применение в ряде ECDIS (например, «dKart™ Navigator 9000» [12]) и разностные имитационные модели. Для прогноза траектории маневра судна по этой модели нужно задать: координаты судна; его курс и скорость относительно воды до начала маневра; время упреждения (от текущего момента до начала перекладки руля); угол перекладки руля; конечный курс. В процессе перехода при планировании предстоящего маневра в качестве начальных координат, курса и скорости берутся их
195
текущие значения. При прогнозе используется соответствующий планируемому маневру алгоритм изменения управляющего сигнала. Если в месте поворота действует течение, данные о котором есть в ECDIS, то траектория поворота может быть получена с его учетом. В результате прогноза поворота, например, с заданным углом руля, определяется место начала поворота, рекомендуемая точка инициации одерживания судна, место конца маневра и точки прогнозируемой траектории. Могут также находиться границы выметаемой корпусом судна при повороте полосы. Для отображения прогнозируемого движения может быть использовано два режима: проигрывание маневра в ускоренном времени и вывод на экран его ожидаемой траектории.
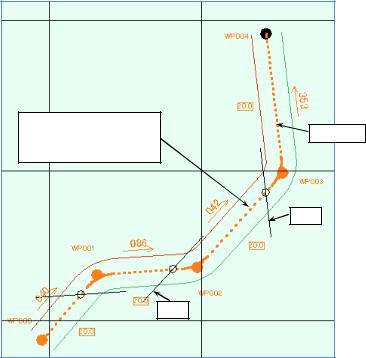
С помощью несложных действий, используя имитационную модель движения судна, можно найти план изменения курса судна в сложных условиях с использованием разных видов поворотов: с заданным радиусом, с заданной угловой скоростью, с заданным углом руля. Один из результатов решения такой задачи в ECDIS «dKart™ Navigator 9000» для поворота с заданным углом руля представлен на рис. 5.37. С помощью имитационной модели могут также планироваться и маневры изменения скорости судна.
-исходное место судна;
-точка начала перекладки руля;
-рекомендуемая точка начала одерживания;
-точка окончания прогноза.
Рис. 5.37. Прогноз поворота для обеспечения точного захода в ворота порта
5.7.2. Предиктор движения корпуса судна при проводке
Текущее прогнозирование движения корпуса судна также может выполняться с помощью разных по сложности моделей его динамики. Наиболее точные результаты получаются по разностным имитационным моделям. Для осуществления прогнозирования в процессе маневрирования по информации навигационных датчиков непрерывно определяются текущие значения параметров движения судна (координаты, истинный курс, курс и скорость относительно грунта, скорость поворота и др.). По этим значениям, нередко и с учетом получаемых от датчиков перекладки руля и частоты вращения винта данных, находится и отображается на экране прогнозируемое движение судна на заданное оператором время, обычно не

196
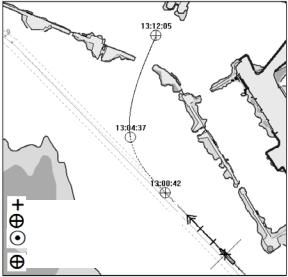
превышающее 6 мин. В ряде ECDIS при таком прогнозировании используется фильтр Калмана. Представляется прогнозируемое движение либо границами выметаемой судном полосы с контуром судна на конечный момент прогноза, либо заданным количеством (обычно до 10) прогнозируемых положений символа судна через назначенный (обычно 1-30 с.) интервал времени. Первый вариант представлен на примере отображения прогноза в ECDIS «NS4000» (рис 5.38,а), а второй – на примере (рис. 5.38,б) такого прогноза при использовании программного продукта «Qastor»
компании «Quality Positioning Services BV».
а) б)
Рис. 5.38. Прогноз движения корпуса судна
Имеемые в ECDIS данные о ветре и течении в месте нахождения судна также могут быть использованы при прогнозировании движения его корпуса. Следует отметить, что текущее прогнозирование будущих положений корпуса целесообразно выполнять в сложных условиях не только при маневре, но и при движении прямым курсом, когда действие возмущающих факторов может вызвать существенные отклонения от курса.
5.7.3. Режим швартовки
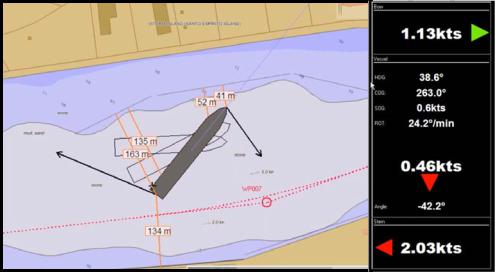
Швартовка судна к причалу является ответственной задачей для персонала мостика и лоцмана. Командующие выполнением этой операции лица должны иметь четкое и полное представление о ситуации во время маневров судна, включая знание дистанции до причала носа и кормы; угла диаметральной плоскости (ДП) судна по отношению к нему; курса, линейной и угловой скорости судна относительно грунта; а также скорости движения кормовой и носовой частей судна. Следует отметить, что для некоторых судов опасной при касании с причалом уже является скорость 5 см/с. Для облегчения маневрирования при швартовке и при плавании в стесненных водах на малом ходу в ряде ECDIS используется специальный режим для швартовки («Docking Mode»). У разных типов ECDIS этот режим имеет определенные отличия. В общем случае он обеспечивает возможность получения и отображения на экране следующих данных:
197
-мгновенных значений продольной и угловой скорости судна;
-векторов текущей скорости движения носа и кормы;
-значений поперечной компоненты скорости носа и кормы;
-угла ДП по отношению к причалу;
-минимальных расстояний от средней и концевых точек контуров носа и кормы до введенных оператором отрезков, отмечающих край причала или кромку отмели (или расстояний между заданными оператором точками на контуре судна и соответствующими им заданными точками на карте);
-заданное количество (до 10-15) прогнозируемых положений контура судна через определенный (1-30 с.) интервал времени;
-заданное количество (до 10-15) прошлых положений контура судна через определенный (1-30 с.) интервал времени.
Для получения этих данных используется информация навигационных датчиков и вычислительные процедуры. Для предсказания будущих положений корпуса применяется обычно имитационная модель движения судна, позволяющая по текущим значениям параметров его движения, а также в ряде случаев и данным о положении руля и параметрам работы других органов для управления судном (движителей и органов подруливающих устройств) решать эту задачу. В ряде ECDIS при таком прогнозировании используется фильтр Калмана. Имеемые в ECDIS данные о ветре и течении также могут быть использованы при прогнозировании.
На рис. 5.38, 5.39 приведены примеры отображения информации в «Docking Mode» при использовании программного продукта «Qastor»
компании «Quality Positioning Services BV» соответственно при маневрировании в стесненных водах и при подходе к причалу. Текущие значения расстояний в процессе маневрирования отображаются до введенных оператором отрезков прямых линий.
Рис. 5.39. Отображение информации при развороте корпуса судна в узкости