

182
5.5. Использование в ECDIS информации РЛС и AIS
Основной целью интеграции в ECDIS РЛ и AIS информации является повышение уровня знания ситуации судоводителями.
Выгоды от использования в ECDIS РЛ информации включают: возможность решения задач предотвращение столкновений, мониторинг движения других судов, идентификацию «целей», контроль положения собственного судна, выявление ложных РЛ объектов, обеспечение информационной избыточности и др. РЛ информация делится на первичную и вторичную. Первая представляет собой РЛ образ обстановки вокруг собственного судна (совокупность РЛ отметок надводных объектов). Первичную РЛ информацию называют также «сырой». Вторичная информация содержит данные РЛ сопровождения «целей».
Информация от AIS также существенно улучшает эффективность ECDIS как инструмента предотвращения столкновений. В том числе это обеспечивает избыточность информации по отношению к РЛС, возможность получения в реальном времени и отображения на экране информации от оборудованных AIS береговых станций и средств навигационного ограждения, увеличивает коммуникационные способности ECDIS. AIS средства навигационного ограждения (AIS-AtoN) могут быть трех видов:
–реальный AIS-знак (физически существующий знак, оборудованный AIS);
–синтетический AIS-знак (существующий физически знак, но касающееся его сообщение передается береговой станцией AIS);
–виртуальный AIS-знак (физически не существует, его местонахождение имитируется по сигналам береговой станции AIS).
Судовой транспондер AIS в автономном режиме работы передает статические и динамические данные о судне, информацию о рейсе и короткие сообщения по безопасности [4].
5.5.1. Применение РЛ информации в ECDIS для определений места
При определениях места судна в ECDIS:
–положение судна необходимо получать с помощью основной системы постоянного позиционирования с требуемой точностью;
–нужно обеспечивать независимый, другого типа, способ нахождения места судна, ECDIS должна быть способна обнаруживать расхождения между данными основного и вторичного датчиков позиции;
–ECDIS должна предупреждать о прекращении поступления данных от позиционного датчика, потере его информации или его неисправности. Известно, что РЛС является одним из датчиков позиции. Полученная от
нее в стесненных водах первичная информация при ее наложении на ENC может рассматриваться как второй независимый способ контроля позиции, так как, в сущности, это определения по РЛС без участия судоводителя. Пока РЛ отметки и соответствующие им ENC объекты совпадают, место своего судна, определенное по основной EPFS (в преобладающем большинстве случаев это GPS или DGPS), является надежным. Если же РЛ отметки

183
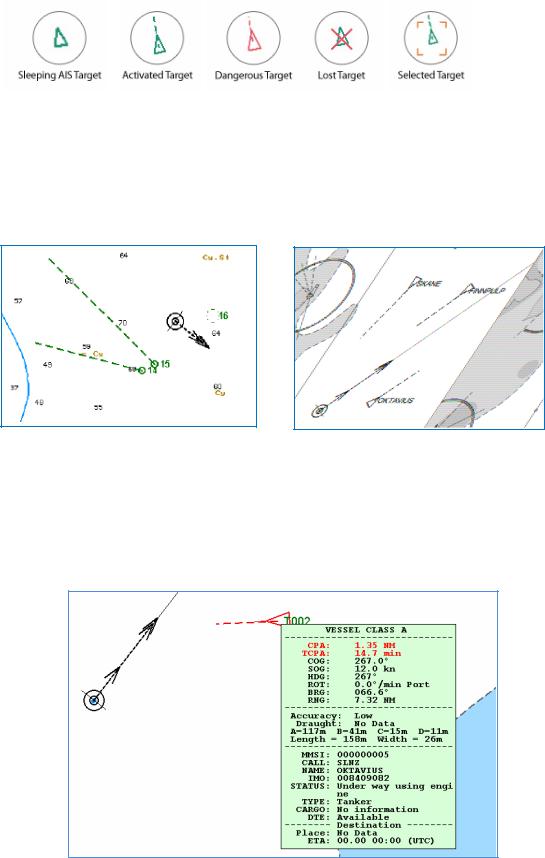
неподвижных точечных объектов не совпадают с положением последних на ENC и смещены на некоторое расстояние, то, очевидно, есть ошибка основной EPFS, в частности - несовпадение геодезических систем координат GPS и карты. Погрешность ГК обусловливает поворот РЛ образа и изображения ENC относительно друг друга. Пример наложения РЛ изображения на ENC показан на рис. 5.21.
Рис. 5.21. Наложение РЛ изображения на ENC
Обычно для автоматического определения места судна по РЛС необходимо указать один или несколько неподвижных точечных объектов карты. На основе их сопровождения как «целей» в ECDIS будет получаться место, курс и скорость собственного судна. В некоторых системах, кроме точечных объектов, можно использовать для этой цели и характерные элементы протяженных РЛ объектов. В ряде ECDIS реализован метод автоматического определения места судна путем совмещения РЛ образа внешней для судна обстановки с изображением карты. Этот метод получил название «Radar-Map matching». Он включает в себя два основных этапа. На первом из них производится начальная привязка РЛ образа внешней обстановки к изображению карты по данным о позиции судна и ориентации его ДП, получаемых от приемника GPS или DGPS. На втором этапе координаты судна и его курс корректируется путем минимизации «суммы квадратов расстояний» между определенными точками участков карты и их РЛ отметок. С этой целью вначале производится сегментация РЛ изображения на малые области, так называемые радарные элементы. Фронты этих элементов аппроксимируется метками в виде точек. Затем находятся вектора расстояний от выделенных радарных меток до соответствующих им точек участков на карте. После этого, используя алгоритм метода наименьших квадратов, вычисляются позиция судна и его курс, при которых сумма квадратов отклонений радарных меток от соответствующих им точек

184
на карте является минимальной. Полученные значения координат считаются результатом РЛ определения места судна и его курса.
Таким образом, РЛС может служить независимым от GPS средством определения места в ECDIS. В этом случае нет необходимости применять другое оборудование, например, РНС Loran-C, в качестве альтернативы GPS.
Отметим, что при отображении РЛ информации в ECDIS:
•картографическое и РЛ изображение должны совпадать по масштабу, проекции и ориентации;
•РЛ изображение и координаты судна, полученные от позиционного датчика, должны автоматически приводиться к CCRP;
•необходимо иметь возможность смещения отображаемого положения судна вручную так, чтобы РЛ изображение совпадало с SENC;
•должна быть возможность снять РЛ изображение одним действием оператора.
5.5.2.Использование РЛ и AIS информации в ECDIS для предупреждения столкновений
Сподключенными РЛС и AIS ECDIS используется в качестве средства предотвращения столкновений. В этом случае ECDIS позволяет задавать ограничения на параметры процесса расхождения, контролировать движение «целей», обнаруживать опасность столкновения, помогать анализировать коллизионные ситуации и выбирать маневры расхождения.
Отображение «целей». В ECDIS могут показываться:
–AIS «цели»;
–сопровождаемые радарные (ТТ – tracked targets) «цели»;
–TT и AIS «цели» (раздельное отображение ТТ и AIS отметок);
–ассоциированные TT и AIS «цели» (объединение ТТ и AIS отметок одной
итой же физической «цели»).
Различают следующие типы РЛ «целей» (рис. 5.22):
1.«цель» в процессе обнаружения и перевода ее в режим сопровождения;
2.«цель» в режиме сопровождения;
3.опасная «цель»;
4.потерянная «цель»;
5.выделенная (для отображения детальной информации) «цель»;
6.эталонная «цель» («цель» в режиме сопровождения, используемая в качестве эталонной, обозначается буквой «R»).
1. |
2. |
3. |
4. |
5. |
6. |
Рис. 5.22. Типы РЛ «целей»
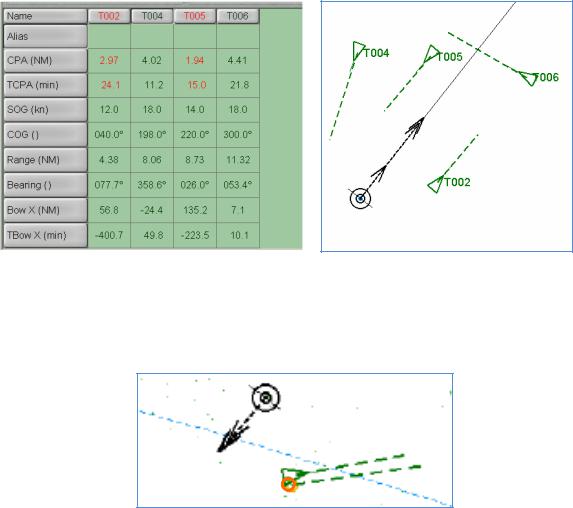
«Цели» AIS в ECDIS бывают следующих видов (рис. 5.23):
-пассивная «цель»;
-активная «цель»;
185
-опасная «цель»;
-потерянная «цель»;
-выбранная (для отображения детальной информации) «цель».
Рис. 5.23. Типы AIS «целей»
Количество отображаемых «целей» в ECDIS отвечает стандартам IMO для РЛ оборудования (см. табл. 4.6 и 4.7). Для каждой выбранной «цели» в буквенно-цифровой форме в ECDIS представляются данные в соответствии с требованиями Резолюции IMO MSC.191(79) (см. параграф 4.3.2).
На рис. 5.24 и 5.25 показаны примеры отображения РЛ и AIS «целей» в ECDIS «NS4000» компании «Transas» [24].
Рис. 5.24. РЛ «цели» на экране ECDIS Рис. 5.25. AIS «цели» на экране ECDIS
На карте около AIS «цели» можно выводить либо присвоенный ей идентификатор (ID), либо название «цели» (Name), либо позывной сигнал
(Call Sign), либо MMSI номер (MMSI number), либо не обозначать ее.
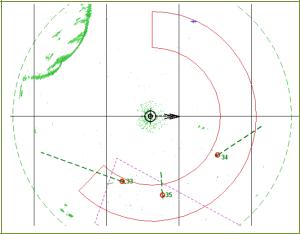
В ряде ECDIS данные о «цели» можно получать путем наведения на нее курсора и нажатия кнопки манипулятора. Пример такого вывода информации представлен на рис. 5.26.
Рис. 5.26. Данные AIS «цели»
на экране ECDIS
186
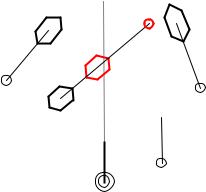
Данные «целей» можно просмотреть и в табличном виде. На рис. 5.27,а представлен пример такой таблицы, для ситуации, показанной на рис. 5.27,б.
ВECDIS возможна сортировка «целей» AIS по:
–времени прихода первого AIS сообщения;
–расстояния до «цели»;
–дистанции до опасной «цели» (опасные «цели» стоят в списке первыми);
–CPA и TCPA (в порядке убывания CPA/CPAmin + TCPA/TCPAmin);
–имени;
–MMSI;
–времени встречи;
–расположению по маршруту («цели» по носу стоят выше в списке, чем расположенные по корме).
а) б)
Рис. 5.27. Таблица данных «целей»
Чтобы избежать отображения двух символов (ТТ и AIS) одной и той же «цели», в ECDIS имеется функция автоматической селекции. Когда выполнен критерий селекции, показывается символ активированной AIS- «цели». В противном случае представляются оба символа (рис. 5.28).
Рис. 5.28. Изображение ТТ и AIS символов одной
«цели» на экране ECDIS «NS4000»
В ECDIS также возможен просмотр коротких сообщений, полученных от «цели». Чтобы просмотреть сообщения, выбирается судно в списке «целей» AIS. Если от него были приняты какие-либо сообщения, об этом информируется индикацией. Для просмотра сообщений, необходимо нажать специальную кнопку. Откроется окно с текстом всех сообщений от «цели».
Назначение ограничений. Для привлечения внимания судоводителя к тем или иным ситуациям, возникаемым при движении судов, в ECDIS могут
187
вводиться определенные ограничения, в том числе путем выделения специальных зон. В ECDIS разных производителей эти зоны могут быть неодинаковыми по форме. В режиме отображения РЛ «целей», например, может устанавливаться одна или две охранные зоны. Эта зона является либо кругом, либо сектором, либо частью кольца, либо задаваемым барьерными линиями полигоном. На рис. 5.29 приведена выделенная красным цветом охранная зона, используемая в ECDIS «NS4000» [23]. Она задается двумя направлениями, дистанцией до внешней части окружности и шириной. В режиме отображения AIS «целей» может задаваться их зона видимости и зона активации. Обычно зоны активации в режиме представления AIS «целей» служат и охранными зонами в режиме отображения РЛ «целей».
Рис. 5.29. Пример охранной зоны
Для своевременного выявления «целей», представляющих опасность столкновения, устанавливаются предельные безопасные значения дистанции (LIM CPA) и времени (LIM ТCPA) кратчайшего сближения, которые являются едиными для РЛ и AIS «целей».
Анализ обстановки и его содержание. При оценке ситуации сближения судов анализируется первичная, вторичная РЛ информация, данные AIS, ЭК
ирезультаты других видов наблюдения. При таком анализе OOW руководствуется МППСС-72, местными правилами, рекомендациями хорошей морской практики и своим опытом. В стесненных водах, где нужно учитывать взаимное расположение и элементы движения судов, их тип, размеры и маневренные характеристики, информацию о надводных и подводных препятствиях, огромное значение для выбора правильных решений имеет способность интегрированного отображения в ECDIS данных от разных источников информации.
При анализе первичной РЛ информации оцениваются навигационные ограничения и выбираются «цели», которые следует взять на сопровождение
иконтролировать параметры их движения. Данные AIS позволяют быстро идентифицировать «цели», получить полную информацию о них, увеличить время на принятие решения по предупреждению столкновения. Совместное использование данных AIS и РЛС+СРП дает возможность осуществлять их взаимный контроль. По полученным данным «целей» определяются их
188
курсовые углы, ракурсы, по носу или по корме они пересекут курс собственного судна, оценивается риск столкновения, производится классификация «целей» по степени опасности. Если в процессе сближения значения DCPA и ТСРА станут меньше LIM CPA и LIM ТCPA, будет подан тревожный сигнал о появлении опасной «цели». При оценке ситуаций используется и способность ECDIS прогнозировать относительное и истинное движение сопровождаемых судов. В результате анализа ситуации выделяются опасные и требующие особого внимания «цели».
Для обнаружения маневра «цели» систематически контролируется на экране ECDIS ее перемещение и цифровые параметры, а также используется способность ECDIS показывать на экране прошлые позиции (следы) «целей». Некоторые ECDIS сами выявляют маневры «целей» и предупреждают об этом факте. Следует помнить, что даже решительный маневр другого судна обнаруживается по данным РЛС+СРП только через 3÷4 мин после его начала, а по информации АИС – через 0.5÷1.0 мин.
Выбор маневра расхождения. Для разрешения коллизионных ситуаций собственное судно может использовать как отдельные маневры, так и их последовательность. Когда задача расхождения решается без обмена информацией с «целями», основой нахождения мер для устранения угрозы столкновения является выделение областей допустимых маневров собственного судна, при которых расхождение возможно на дистанции, не меньшей заданной. Для проверки качества намечаемого маневра расхождения в ECDIS обычно используется его проигрывание.
В ряде ECDIS для облегчения выбора маневров расхождения можно использовать специальные изобразительные модели ситуации. Так в ECDIS «VisionMaster FT» компании «Sperry Marine» могут показываться зоны вероятной опасности (predicted area of danger - PAD) для маневров курсом собственного судна. Такие зоны рассчитываются для каждой «цели» и применяются как для оценки угрозы столкновения, так и для определения курса расхождения. Схематично PAD показаны на рис. 5.30.
Рис. 5.30. Отображение ситуации с помощью PAD
Если курс судна оператора пересекает PAD какой-либо «цели», то существует угроза столкновения с ней. Чтобы разойтись безопасно с «целями», следует выбрать курс, не пересекающий ни одной зоны опасности.

189
В ECDIS компании «Navmarine» [8] применяется другая изобразительная модель, облегчающая выбор маневров расхождения курсом, скоростью, совместно курсом и скоростью, основанная на использовании
секторов опасных относительных курсов (СООК). Эта модель позволяет оценить опасность столкновения с одной и более «целями» и принять решение о маневре по положению конца вектора пути собственного судна относительно СООК, отображенного на экране.
|
|
B1 |
|
Сектор опасных |
KJ |
|
относительных курсов |
DКРЗ |
|
K0 |
B0 |
|
J |
|
|
|
|
|
|
B2 |
A |
Курс для расхождения с целью на дистанции |
|
DKPЗ с пересечением ее курса по корме |
||
0 |
Вектор скорости для расхождения на DKPЗ путем |
|
|
изменения курса и скорости |
|
Рис. 5.31. Применение СООК для выбора маневров расхождения
Принцип образования СООК для «цели» показан на рис 5.31, где: 0, J - соответственно собственное судно OS (Own ship) и «цель»;
AB0 - отрезок, параллельный относительному курсу OS на сближение с
«целью» вплотную, его длина равна текущему расстоянию (0J) между OS и «целью»;
AB1 - отрезок, параллельный относительному курсу OS для расхождения с «целью» на расстоянии DKP3 с пересечением ее курса по носу;
AB2 - отрезок, параллельный относительному курсу OS для расхождения с «целью» на расстоянии DKP3 с пересечением ее курса по корме.
Рис. 5.32. Отображение с помощью СООК ситуации с пятью «целями»