

190
Опасность столкновения с «целью» существует, если конец вектора скорости собственного судна находится в СООК. Расхождение можно обеспечить, выбирая вектор скорости, конец которого не попадает в СООК. На рис. 5.32 [8] представлено отображение ситуации с 5-ю «целями» и выбранный для расхождения курс. Собственное судно меняет курс вправо,
чтобы пройти впереди цели 4 и позади цели 1 на расстоянии DKP3 .
5.6. Управление движением судна
Автоматический вывод команд ECDIS на рулевое устройство и систему управление двигателем судна не представляет проблем и реализован в ряде ECDIS. Это позволяет с помощью ECDIS автоматически управлять движением судна по маршруту (путем изменения курса) и по расписанию (посредством корректировки скорости хода).
Рассмотрим первую из этих задач. Для ее выполнения предусматривается возможность вывода данных ECDIS на авторулевой (АР). Взаимодействуя с АР, ECDIS обеспечивает стабилизацию центра массы судна на отрезке маршрута, выполнение поворотов запланированным образом, плавание вдоль проложенного маршрута или же к заданной путевой точке. Работающие совместно ECDIS (или ECS) и АР образуют систему вождения судна по маршруту (TCS - Track control system). Стандарты IMO этой системы представлены в Резолюции MSC.74(69), 1998 г., Приложение
2, «Recommendation on performance standards for TCS». Они должны применяться к TCS судов, максимальная скорость поворота которых не превышает 100/с, в диапазоне скоростей хода от минимальной маневренной до 30 узлов. Ниже представлены основные из требований к TCS.
5.6.1. Требования к TCS
TCS должна быть способной вести судно от его позиции к отдельной точке или по маршруту, определенному последовательностью путевых точек. Требуется, чтобы основная позиционная система, предоставляющая TCS координаты судна, была электронной и одобренной ИМО. Необходим непрерывный мониторинг места судна по информации второго независимого датчика позиции, который может не являться частью TCS.
При подходе к точке поворота тревожный звуковой сигнал и предупреждение индикацией об изменении курса должны быть поданы TCS не позже, чем за минуту перед перекладкой руля для выполнения поворота. В системе следует иметь средство, с помощью которого OOW подтверждает прием этого сигнала. Если OOW не подтвердил его прием в течение 30 с. после его подачи, то TCS должна подать повторный тревожный сигнал.
Необходимо, чтобы поворот с одного отрезка маршрута на другой основывался на заданном радиусе или радиусе, вычисленным по предварительно назначенной угловой скорости.
191
Система должна быть способной вручную или автоматически подстраиваться к изменению управляемости судна при различной погоде, скорости и загрузке. Необходимо иметь средства для предупреждения излишних активаций руля при рыскании на волнении, при смещениях ЦМ судна на поперечно-горизонтальной качке, и при «разбросе» измеряемых значений координат судна из-за случайных ошибок позиционной системы.
Предписано иметь возможность перехода от автоматического вождения по маршруту к ручному управлению судном при любом положении руля и в любых условиях, включая отказ TCS. Обратный переход должен быть возможен только намеренным действием оператора.
TCS должна быть способной работать в режиме управления курсом и удовлетворять в нем всем требованиям к управляющей курсом системе (АР). Во всех условиях следует иметь возможность перехода от режима вождения по маршруту к режиму АР. При активации режима АР система должна приводить курс судна к заданному значению. Необходима непрерывная информация о курсе от второго независимого компаса, который может не являться частью TCS. Обратный переход от режима АР к вождению по маршруту должен производиться намеренным действием судоводителя. Индикацией следует указывать название активного режима управления.
TCS должна соединяться с датчиками позиции, курса и скорости судна. Курсоуказателем должен быть ГК. Все подсоединенные к TCS датчики должны предоставлять информацию о своем статусе, включая сведения о выходе из строя. Сигнализация и индикация должны быть в случаях:
-выхода из строя системы электропитания или его снижения до уровня, при котором нарушается безопасность функционирования;
-бокового смещения от линии пути на величину, большую заданной;
-отклонения от курса, превышающего заданный предел;
-выхода из строя позиционного датчика или компаса;
-снижения скорости ниже предела, необходимого для безопасного управления судном;
-отсутствия подтверждения вахтенным помощником приема аварийного сигнала в течение 30 с. после его подачи.
ВTCS необходимо непрерывно отображать такие данные:
•режим управления;
•источники информации о позиции, курсе и скорости;
•статусы всех датчиков и случаи их отказа;
•курс по активному отрезку маршрута, действительный курс, курс на следующем отрезке маршрута;
•координаты, боковое отклонение от линии пути, скорость судна;
•номер активной и следующей за ней путевой точки;
•время и дистанцию до активной точки поворота;
•название маршрута.
По требованию должен показываться перечень запланированных путевых точек, включая их номера, координаты, курсы и дистанции между соседними из них, радиусы поворота и другие параметры плана движения.
192
5.6.2. Структура системы
ECDIS идеально подходит в качестве управляющей движением судна по маршруту системы. Она позволяет легко планировать маршрут с определением его прямолинейных и криволинейных участков и безопасных границ, выполняет автоматически контроль движения судна по маршруту, определяя боковое отклонение от него, дистанцию и время до точки поворота. Для превращения ECDIS в управляющее устройство достаточно добавить в нее программу выработки сигналов управления, обеспечивающих точное движение судна по заданному маршруту, и выводить их на АР.
Согласно стандарту IEC 62065 (2002 г.) бортовые системы (или виды) вождения судна по маршруту делятся на три категории:
–TCS категории А проводит судно по прямому отрезку пути;
–TCS категории В проводит судно по прямым отрезкам маршрута и выполняет повороты по команде оператора;
–TCS категории С управляет судном на отрезках пути и на поворотах.
ВTCS категории В, когда подается тревожный сигнал о подходе к WPT, для инициации изменения курса необходимо нажать специальную кнопку. TCS категории С выполняет после такого сигнала поворот автоматически. В ECDIS могут предусматриваться все три названные выше вида вождения.
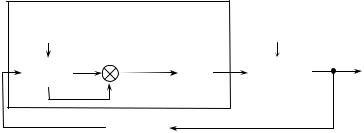
TCS совместно с рулевым приводом и судном образует систему
автоматического управления движением по маршруту (САУМ). Ее упрощенная блок-схема представлена на рис. 5.33.
|
|
Заданный |
|
TCS |
|
|
|
|||
|
|
маршрут |
|
|
|
|
|
Возмущения |
||
|
|
|
U |
К3 |
|
|
|
|
|
|
|
|
ECDIS |
|
АР |
|
Судно |
|
|||
|
|
|
|
|
|
|||||
|
|
|
КМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||||
ϕ, λ, ПУ, V |
ПИ GPS |
|
|
|
|
|
||||
|
|
|
|
|
|
|||||
Рис. 5.33. Блок-схема САУМ
Управление на прямом отрезке маршрута заключается в расчете в зависимости от бокового смещения судна от линии пути поправки U к курсу
KM этого отрезка и задании АР курса K3 = KM +U , стабилизация которого
обеспечивает нахождение ц.м. судна на линии пути. Могут в TCS применяться три режима начала поворотов (WOL, WOP, WOT). Из них чаще используется первый – «wheel over line», характеризуемый на рис. 5.34.
Система TCS ведет непрерывный контроль проводки судна по маршруту. Она предоставляет OOW наименование маршрута и данные, характеризующие его прохождение. Это - боковое смещение от линии пути (XTD); расстояние (DTG), пеленг (BTW) и расчетное время (TTG) движения до активной WPT; ожидаемое время прибытия в нее (ETA). Индицируются также курсы активного и следующего за ним отрезка маршрута.