

Курс теоретичної механіки 2007 (Укр)
.pdfОДЕСЬКА ДЕРЖАВНА АКАДЕМІЯ БУДІВНИЦТВА ТА АРХІТЕКТУРИ
В.М.ФОМІН, І.П.ФОМІНА
КУРС ТЕОРЕТИЧНОЇ МЕХАНІКИ методичний посібник для студентів заочної форми навчання
Одеса-2007
Затверджено редакційно-видавничою радою ОДАБА
Укладачі: канд.техн. наук, доц. В.М.Фомін асистент І.П.Фоміна
Рецензенти: доктор техн. наук, проф. Кирилов В.Х. канд. техн. наук, доц. Гітерман Д.М.
2
В С Т У П
_____________________________________________________________
Теоретична механіка – це наука про загальні закони руху і рівноваги тел. Під рухом у теоретичній механіці розуміється зміна
положення тіл у просторі і часі.
Час у теоретичній механіці вважається абсолютним, тобто, що протікає однаково у всіх системах відліку. Властивості простору, у якому відбувається рух тіл, покладаються незалежними від тіл і однаковими у всіх точках простору і у всіх напрямках, тобто він вважається однорідним і ізотропним. Це означає, що теоретична механіка базується на представленнях класичної (ньютоновскої) механіки.
Теоретична механіка, як і класична механіка взагалі, лише приблизно відбивають властивості навколишнього світу, тому що властивості простору і часу, а так само властивості тіл, як це з'ясувалося в першій половині двадцятого століття і було відбито в теорії відносності, залежать від руху самих тел. Однак для рішення задач, у яких розглядаються тіла, що рухаються зі швидкостями, далекими від швидкості світла (а так це обстоїть у переважній більшості практичних випадків), її результати виявляються цілком прийнятними для технічних розрахунків.
Теоретична механіка є природничою наукою, що спирається на результати досвіду. Це виявляється у формулюваннях аксіом, на яких вона базується. Крім того, у ній широко використовується математичний апарат при висновку результатів і використанні їх при рішенні практичних задач.
Основними об'єктами теоретичної механіки є матеріальні точки, абсолютно тверді тіла і їхні системи. Однак її закони і результати широко використовуються в багатьох технічних дисциплінах (опорі матеріалів, теорії пружності, будівельній механіці, механіці рідини і газу) при рішенні різноманітних технічних задач.
3
Теоретична механіка складається з трьох розділів: статика, кінематика і динаміка.
Устатиці вивчаються умови рівноваги тіл і взаємодії тіл при рівновазі.
Укінематиці вивчається рух тіл з геометричної точки зору, тобто поза залежністю від сил, що діють на ці тіла.
Удинаміці вивчається рух тіл у залежності від сил, що діють на тіла.
4
Ч А С Т И Н А I. С Т А Т И К А
_____________________________________________________________
Г Л А В А I
ОСНОВНІ ПОНЯТТЯ І АКСІОМИ СТАТИКИ
§ 1. Абсолютно тверде тіло
Тіло називається абсолютно твердим, якщо відстань між
будь-якими двома точками його залишається незмінним.
Це означає, що в процесі руху форма тіла не змінюється, тобто таке тіло є недефоруємим. Дійсно, якщо тіло випробує, наприклад, розтягання, то завжди знайдуться такі точки тіла, відстань між якими збільшується. Якщо ж тіло випробує стиск, то завжди знайдуться точки тіла, відстань між якими зменшується і т.д. У природі недеформуємих тіл не існує. Поняття ж абсолютне твердого тіла є абстрактним поняттям, тобто отриманим у результаті зневаги деформацій тіла при русі для більш чіткого вивчення самого руху тіла як такого.
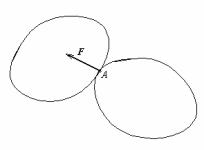
§ 2. Сила.
Поняття про силу відноситься до числа невизначених чи
базових понять.
Справа в тім, що кожне поняття вводиться через деяку сукупність інших понять. У свою чергу, ця сукупність визначається через ще якусь іншу сукупність понять і т.д. Якщо продовжувати рухатися в цьому напрямку, то в результаті приходимо до деяких первинних, базових понять, що не можуть
Мал.1 бути визначені через які-небудь інші. Поняття про силу саме відноситься до таким. Сили виникають у результаті взаємодії тіл, тоб-
5

то джерелом усякої сили є деяке тіло. Сила виступає заходом впливу одного тіла на інше і тому характеризується:
1.величиною,
2.напрямком,
3.точкою прикладення,
тобто сила є прикладеним вектором. У міжнародній системі одиниць виміру фізичних величин сила виміряється в ньютонах (Н).
Векторні величини, зокрема сили, будемо позначати латинськими буквами, надрукованими жирним шрифтом, а їхні величини − тими ж буквами, але надрукованими звичайним шрифтом.
§ 3. Момент сили відносно осі.
Для характеристики обертаючої здатності сили відносно осі вводиться спеціальна величина, іменована моментом сили відносно
осі.
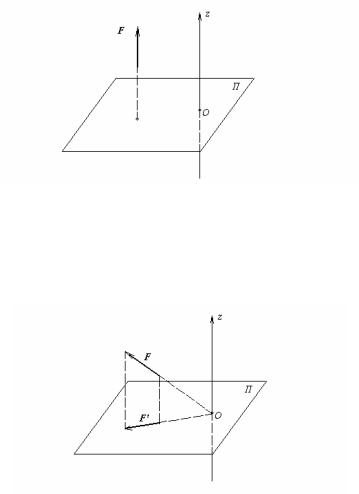
Моментом mz(F) сили F відносно осі z називається число,
що визначається за наступним правилом: |
|
|
|
|
||
|
1. |
проводимо площину Π, |
||||
|
перпендикулярну осі, |
|
|
|||
|
2. проектуємо силу на цю |
|||||
|
площину, |
|
|
|
|
|
|
3. знаходимо точку перети- |
|||||
|
нання осі і площини і |
|||||
|
проводимо |
з |
цієї точки |
|||
|
перпендикуляр |
на |
лінію |
дії |
||
|
проекції сили, |
|
|
|
||
|
4. |
множимо довжину h |
||||
|
цього перпендикуляра на вели- |
|||||
|
чину F/ проекції сили, |
|
|
|||
|
3. |
приписуємо |
цьому до- |
|||
|
бутку знак «плюс», якщо з до- |
|||||
Мал.2 |
датнього |
напрямку осі видно, |
||||
|
сила створює |
обертання |
нав- |
|||
коло осі проти годинної |
стрілки, і |
знак «мінус» у протилеж- |
||||
ному випадку. |
|
|
|
|
|
|
Таким чином, одержуємо |
|
|
|
|
|
|
mz (F) = ±F / h .
6
Властивості моменту сили відносно осі.
1.Якщо лінія дії сили паралельна осі, то момент сили відносно осі дорівнює нулю.
Мал.3
Дійсно, у цьому випадку проекція F/ сили F на площину Π дорівнює нулю (див. Додаток 2).
2.Якщо лінія дії сили перетинає вісь, то момент сили відносно осі дорівнює нулю.
Мал.4 Проведемо площину, перпендикулярну осі, через точку О перетинання
лінії дії сили й осі. Легко бачити, що в цьому випадку лінія дії проекції сили також проходить через точку О. Тому довжина перпендикуляра h,
7

опущеного з цієї точки на лінію дії F/, дорівнює нулю, а, отже, дорівнює нулю і mz (F).
3. Якщо сила лежить у площині, перпендикулярній осі, то мо мент сили відносно осі визначається за більш простим правилом:
1) знаходимо точку перетинання осі і площини, 2) з цієї точки проводимо перпендикуляр на лінію дії сили, 3) множимо довжину
перпендикуляра h (яка
називається плечем) на величину сили F,
4) вибираємо знак відповідно до пункту 5 визначення моменту.
Мал.5 |
Таким чином, момент сили |
|
відносно осі визначається у |
цьому випадку за формулою |
|
mz (F) = ±Fh .
Це очевидно, тому що в цьому випадку F/ = F.
§ 4. Момент сили відносно полюса
Будемо називати полюсом деяку нерухому точку простору.
Моментом mo(F) сили F відносно полюса O називається вектор, що
|
1) |
прикладений у полюсі, |
|
2) |
перпендикулярнийі площини, у якій |
|
лежать лінія дії сили і полюс, |
|
|
3) |
спрямований у ту сторону, відкіля |
|
видно, що сила створює обертання |
|
|
відносно полюса проти годинної стрілки, |
|
|
4) |
за абсолютною величиною дорівнює |
|
добутку величини сили на плече, тобто |
|
Мал.6 |
на довжину перпендикуляра h, опущеного |
|
з полюса на лінію дії сили:
8
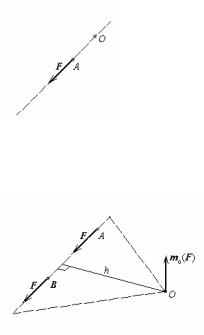
| mo (F) |= Fh .
Властивості моменту сили відносно полюса:
1. Якщо лінія дії сили проходить через полюс, то момент сили
відносно полюса дорівнює нулю.
Очевидно, що в цьому випадку довжина перпендикуляра, що повинний бути проведений з полюса на лінію дії сили, дорівнює нулю. Звідси і випливає рівність нулю самого моменту.
Мал.7
2. Момент сили відносно полюса не змінюється при переносі сили
уздовж її лінії дії.
Це пояснується тим, що при такому переносі площина, у якій розташовані лінія дії сили і полюс, залишається незмінної. Залишаються незмінними також плече h і напрямок обертання, створюваного силою (мал.8).
Мал.8
3.Геометрична сума моментів двох прямопротилежних сил відносно будь-якого полюса дорівнює нулю.
Прямопротилежними (скорочено п.п.с.) називаються сили,
що лежать на одній прямій, спрямовані в протилежні сторони і рівні за величиною (мал.9).
Моменти прямопротилежних сил F1 і F2 лежать на одній прямій і спрямовані в протилежні сторони, тому що вони перпендикулярні однієї і тієї ж площини, а обертання створювані силами протилежні (мал.9). Величини ж моментів рівні, тому що рівні величини сил.
9
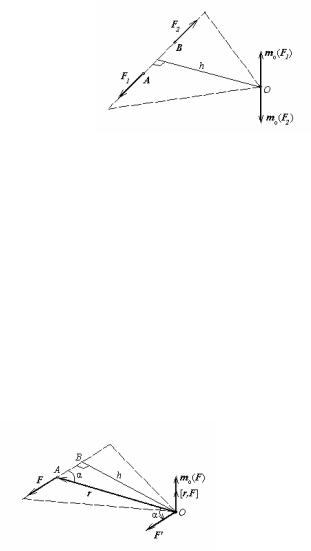
Тому можна записати рівність mo (F1 ) = −mo (F2 ) , відкіля випливає рівність нулю геометричної суми моментів.
Мал.9
§ 5. Представлення моменту сили відносно полюса у виді векторного добутку
Радіус-вектором точки А називається вектор r , що з'єднує полюс O з цією точкою (мал.10).
Теорема. Момент сили відносно полюса дорівнює векторному добутку радіус-вектора точки прикладення сили на силу, тобто
mo (F) = [r, F] . |
(1) |
Доказ. Переконаємося, що рівність (1) справедлива. Для цього треба показати, що вектори, що стоять у лівій і правій частинах рівності, мають однакові величини й однакові напрямки.
З визначення моменту сили відносно полюса маємо
| mo (F) |= Fh . |
(2) |
За визначенням векторно-го добутку |
|
|[r, F] |= Fr sin α . |
(3) |
Тому що трикутник ОАВ прямокутний (мал. 10), то rsinα=h. Звідси випливає, що праві частини формул (2) і (3) рівні, а, отже,
|
| mo (F) |=|[r, F] | . |
(4) |
Мал.10 |
Для знаходження напрямку |
|
10