

Курс теоретичної механіки 2007 (Укр)
.pdf&x& = |
1 |
F − fg . |
(14) |
|
|||
|
m |
|
|
Після підстановки заданих значень m, f і F |
рівняння (14) приймає |
||
наступний вид: |
|
||
&x& = 2t 2 − 0.98 |
(15) |
||
(g прийнято рівним 9,8 м/с2).
Це і є диференціальне рівняння руху точки. Помноживши його на dt і інтегрируючи, одержимо
& |
2 |
t |
3 |
− 0.98t + C1 . |
(16) |
|
|
||||
x = |
3 |
|
|||
|
|
|
|
|
Значення постійної інтегрування З1 знайдемо з початкових умов (12), з огляду на те, що V = Vx = x& = 0 при t = 0. Підставляючи цю рівність у (16), знаходимо, що С1 = 0. Множачи тепер (16) на dt і інтегруючи ще раз, приходимо до наступного рівності:
x = |
1 |
t |
4 |
− 0.49t |
2 |
+ C |
2 |
. |
(17) |
6 |
|
|
|||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Постійну інтегрування С2 знаходимо з умови х = 0 при t = 0. Підставляючи це в (17), знаходимо, що С2 = 0. Таким чином, рівняння руху тіла має наступний вид:
x = 16 t 4 − 0.49t 2 .
2.Прямолінійний рух точки під дією сили, що залежить від швидкості.
Задача. Деяке тіло масою m = 2 кг опускається усередині гладкої похилої труби, заповненою рідиною, без початкової швидкості (мал.4). Вважаючи, що сила опору рідини руху вантажу визначається співвідношенням R = 0,4V (Н) і зневажаючи силою рідини, що виштовхує, знайти швидкість тіла після 10 с з початку руху.
Рішення. Показуємо на кресленні Мал.4 сили, що діють на тіло, і складуємо
основне рівняння динаміки точки
ma = P+N+R. |
(18) |
Направляємо вісь х уздовж напрямку руху |
і проектуємо (18) на цю |
вісь. З огляду на, що V = Vx = x , знаходимо |
|
& |
|
111

mV& = Pcos 60o – R . |
(19) |
Підставляючи сюди вихідні дані, одержуємо диференціальне рівняння:
dV = 4,9 − 0,2V . dt
Це рівняння з перемінними, що розділюються. Приводимо його до наступного виду:
dt = |
|
dV |
|
|
|
|
|
|
|
|
4,9 − 0,2V |
|
||
і інтегруємо ліву частину |
за t, а праву за V. У результаті будемо ма- |
|||
ти |
|
|
|
|
t = −5ln | 4,9 − 0,2V | +C . |
(20) |
|||
Використовуємо початкову умову: V = 0 при t = 0. З (20) одержуємо
С = 5 ln 4,9.
Підставимо це в (20) і зробимо потенціювання:
|24,5−V | = 24,5 e−5t. |
(21) |
З (21) випливає, що з часом V зростає від нуля поступово наближаючись до 24,5 м/с, але теоретично ні при якому кінцевому t цього значення не досягає. Тому знак абсолютної величини в (21) може бути опущений. У результаті одержуємо
V = 24,5 (1−e−5t) (м/с). |
(22) |
Рівність (22) показує, що практично вже через кілька секунд після початку руху V невловимо мало відрізняється від свого граничного значення. При t =10 с V = 24,5 м/с.
3.Балістична задача.
Розглянемо рух тіла (снаряда), викинутого з початковою швидкістю Vo із точки О горизонтальної площини під кутом α до цієї площини. Опором повітря зневажаємо, крім того, будемо вважати, що сила ваги снаряда усюди та сама, тобто що висота польоту снаряда не
112
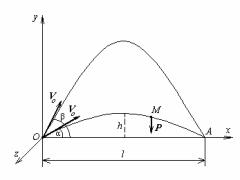
дуже велика. Необхідно при заданих α і Vo знайти дальність польоту снаряда l і час його польоту Т, а також при заданих Vo і l знайти кут пострілу α (тобто вирішити задачу прицілювання).
Рішення. Проведемо вертикальну площину через вектор Vo. У цій площині через точку проводимо горизонтальну вісь Ох і вертикальну вісь Оу. Вісь Оz проводимо перпендикулярно площини
Оху.
На снаряд, що ми вважаємо матеріальною точкою, діє тільки одна сила ваги. Тому основне рівняння динаміки виглядає так:
|
|
|
ma = P. |
Мал.5 |
|
Проектуючи його на осі |
|
|
|
координат, одержуємо |
|
mx = 0, my = −P, mz = 0. |
(23) |
||
&& |
&& |
&& |
|
Розділивши рівності |
(23) |
на m і |
користаючись тим, що |
Vx = x&, Vy = y&, Vz = z& , приходимо до наступного диференціальним
рівнянням: |
|
|
|
|
|
V& |
= 0, V& |
= −g, V& |
z |
= 0. |
(24) |
x |
y |
|
|
|
|
Помножимо рівності (24) на dt і проінтегруемо: |
|
||||
Vx = C1 , |
Vy = −gt+C2 , |
Vz = C3 . |
(25) |
||
Початкові умови задачі виглядають так: |
|
|
|||
x = 0, y = 0, z = 0, Vx = Vo cos α, Vy = Vo sin α, Vz = 0 |
при t = 0. (26) |
||||
З (25) і останніх трьох рівностей (26) випливає |
|
||||
C1 = Vo cos α, C2 = Vo sin α, C3 = 0. Тоді (25) запишеться так:
113
x& = Vo cos α, y& = Vo sin α− gt, z& = 0 .
Множачи ці рівності на dt і інтегруючи, знаходимо
x = Vo t cos α +C4, y = Vo t sin α − gt2 / 2 + C5, z = C6 . (27)
Підставляючи сюди значення x, y і z з перших трьох рівностей (26) і t= 0, одержуємо, що
С4 = С5 = С6 = 0.
При цих значеннях довільних постійних рівності (27) являють собою рівняння руху снаряда:
x = Vo t cos α , y = Vo t sin α − gt2 / 2, z =0 . |
(28) |
Остання рівність означає, що снаряд рухається в площині Оху.
1. Знайдемо рівняння траєкторії снаряда. Для цього необхідно виключити час t з перших двох рівнянь (28):
y = x tg α − |
|
gx2 |
|
. |
(29) |
|
2V |
2 |
cos2 |
|
|||
|
α |
|
||||
|
|
o |
|
|
|
|
Таким чином, снаряд, випущений під кутом до обрію, при відсутності опору повітря рухається по параболі.
2.Визначимо горизонтальну дальність польоту снаряда.
Для цього в рівнянні (29) покладемо у = 0. Не співпадаюча з початком координат точка траєкторії з такою ординатою має абсцису
|
V |
2 |
sin 2α |
|
|
l = |
|
o |
|
. |
(30) |
|
|
|
|||
g
Визначимо час польоту снаряда. Для цього в першої рівності (28) покладемо х рівним правої частини (30). У результаті будемо мати
|
2Vo sin α |
|
Т = |
|
. |
|
||
|
g |
|
3.Залишилося вирішити задачу прицілювання. Помітимо, що з
(30)випливає , що максимальна дальність польоту снаряда досягається при α = 45о:
114
|
|
|
lmax = |
|
|
Vo2 |
. |
|||
|
|
g |
||||||||
|
|
|
|
|
|
|
|
|||
Нехай l≤ lmax . Тоді з (30) знаходимо |
|
|||||||||
|
|
|
sin 2α = |
gl |
|
≤1, |
||||
|
|
|
||||||||
|
|
|
|
|
Vo2 |
|
||||
відкіля знаходимо α1 |
= |
1 |
arcsin( |
gl |
), α2 = 90o − α1 . Таким чином, при |
|||||
2 |
2 |
|||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
Vo |
|
|
|
|
|
|
l< lmax у ту саму мету можна влучити, стріляючи по двох траєкторіях – настильної (α < 45ο) і навісний (β =90о − α > 45ο).
§5. Вільні коливання матеріальної точки
Відновлюєчою чи квазиупругой називається сила, постійно спрямована до нерухомого центра О и пропорційна відстані від матеріальної точки М до цього центра, тобто
|
|
|
F = − c OM |
(31) |
|
( c – додатньа постійна).
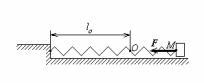
Подібна сила створюється розтягнутою чи стиснутою пружиною (мал.6).
Тут lo − довжина недеформованої пружини. При зсуві вантажу від точки О в будь-яку сторону пружина прагне повернути вантаж у вихідне положення, при цьому пружна сила пружини F пропорциональна величині зсуву
Мал.6 ОМ з коефіцієнтом пропорційності с, що носить назву коефіці-
єнта жорсткості пружини.
Прямолінійний рух матеріальної точки під дією тільки однієї відновлючої сили, називається вільними коливаннями Точка О
(центр відновлючої сили,) називається центром коливань.
Помітимо, що центр коливань є положенням рівноваги точки М. Дійсно, відповідно до формули (31), якщо матеріальна точка М знаходиться в положенні О, те F виявляється рівної нулю, і на точку М в цьому положенні взагалі не діють сили.
115

Проведемо вісь Ох з центра коливань уздовж прямої, по якій рухається точка (мал.7). Складемо основне рівняння динаміки точки
ma = F
і спроектуємо його на вісь х, з огляду на те, що проекція відновлючої сили, дорівнює
Мал.7 |
Fx = −cx. |
У результаті будемо мати
m&x& = −cx . |
(32) |
Розділивши (32) на m і ввівши позначення
|
2 |
= |
c |
(33) |
|
k |
|
|
, |
||
|
|
||||
m
одержуємо диференціальне рівняння вільних коливань матеріальної
точки
&x&+ k 2 x = 0 . |
(34) |
Це лінійне однорідне диференціальне уранение другого порядку з постійними коефіцієнтами. Складемо його характеристичне рівняння :
λ2 + k2 = 0.
Оскільки корені його чисто мнимі λ1,2 = ± ικ, то загальне рішення диференціального рівняння (34) має наступний вид:
x = C1 sin kt + C2 cos kt.
Зробимо підстановку C1 = a cos α, C2 = a sin α. У результаті
одержимо x = a (sin kt cos α + cos kt sin α) чи |
|
x = a sin (kt + α). |
(35) |
Вираження (35) являє собою рівняння |
вільних коливань |
матеріальної точки.
Прямолінійний рух точки, чинений за законом x = a sin (kt + α),
називається гармонійними коливаннями.
116

Таким чином, вільні коливання матеріальної точки є
гармонійними.
Величина а, що є найбільшим відхиленням точки від центра
коливання, називається амплітудою.
Величина φ = kt + α називається фазою коливання, а α = φ (0)
називається початковою фазою.
Величина k називається круговою чи циклічною частотою
коливань.
Проміжок часу Т, протягом якого точка виконує одне повне
коливання, називається періодом коливань.
Це означає, що якщо час у формулі (35) збільшується на Т, то аргумент синуса в цій формулі змінюється на 2π. Звідси випливає, що k = 2π, тобто
T = |
2π |
, |
|
(36) |
|
|
|
||||
|
k |
|
|||
відкіля одержуємо |
|
||||
k = |
2π |
, |
(37) |
||
|
|||||
|
|
T |
|
||
тобто кругова частота дорівнює числу повних коливань, чинених за 2π одиниць часу.
Число ν повних коливань, чинених в одиницю часу, називається
частотою коливань:
ν = 1 .
T
Очевидно,
k = 2πν.
Величини а і α визначаються з початкових умов. Нехай
х = хо , V = Vo при t = 0. Диференцуючив (35) за часом, одержимо
V= ak cos (kt+α).
З(35) і (40) з обліком (39) знаходимо
a = x |
2 |
+ |
Vo2 |
, |
tg α = |
kxo |
. |
o |
k 2 |
|
|||||
|
|
|
|
Vo |
|||
З (37), (38) і (41) випливає |
|
|
|
|
|
|
|
(38)
(39)
(40)
(41)
117
1)амплітуда і початкова фаза коливань залежать від початкових умов,
2)кругова частота і період не залежать від них.
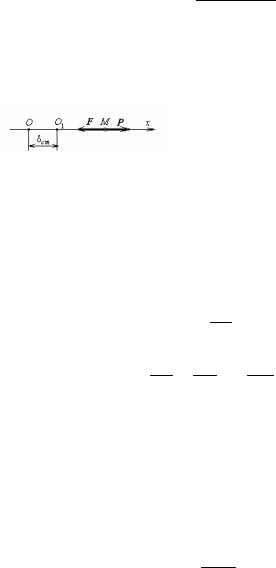
§6. Вплив постійної сили на вільні коливання матеріальної точки
Нехай тепер на матеріальну точку крім відновлючої сили, діє ще постійна сила Р (мал.8).
Знайдемо нове положення рівноваги О1 точки М. Очевидно, у цьому положенні F + P = 0, тобто
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− сOO1 + Р = 0, |
(42) |
|||
Мал.8 |
відкіля |
|
||||||||||
|
|
|
|
= |
|
P |
. |
(43) |
||||
|
|
OO |
||||||||||
|
|
|||||||||||
1 |
|
c |
|
|||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||||
Позначимо δст =| OO1 | і назвемо δст статичним зсувом. |
|
|||||||||||
Тоді з (43) випливає |
|
|
|
|
|
|
|
|
||||
|
|
|
δст = |
P |
. |
(44) |
||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
c |
|
|||||
Знайдемо тепер геометричну суму сил, що діють на точку в довільному положенні:
F1 = F + P = −c OM + P . Підставивши сюди Р з (42), будемо мати
F1 = −c OM + c OO1 = −c O1M .
Це означає, що фактично точка рухається під дією відновлючої сили F1 , центр якої знаходиться в новому положенні рівноваги О1 , зміщеному на відстань δст від старого положення рівноваги. Звідси випливає справедливість усіх висновків попереднього параграфа й у цьому випадку. Таким чином,
додавання постійної сили не змінює характеру вільних коливань – вони залишаються гармонійними, але центр коливань зміщається
на величину статичного зсуву убік дії постійної сили.
З (33) і (44) маємо
k 2 = P .
mδст
118
Тоді
T = 2π = 2π m δст .
kP
Це означає, що період коливань пропорційний кореню квадратному
зі статичного зсуву.
Якщо сила Р є силою ваги, тобто коли коливання відбуваються по вертикальній прямій, то P = mg і
T = 2π |
δст |
. |
(45) |
|
g
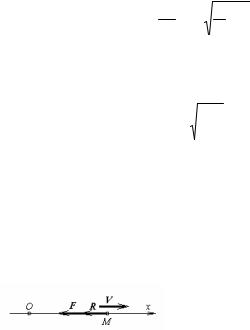
§7. Вільні коливання матеріальної точки при наявності в'язкого опору
Нехай тепер крім відновлючої сили, F на матеріальну точку діє сила опору R, пропорційна першого ступеня швидкості точки, тобто
R = − b. |
(46) |
Знак мінус у рівності (46) означає, що сила опору спрямована протилежно швидкості. Складемо основне рівняння динаміки
Мал.9
ma = F + R
і спроектуємо його на вісь х:
mx = −cx − bx . |
(47) |
|
&& |
& |
|
Розділимо (47) на m і в результаті одержимо диференціальне
рівняння вільних коливань матеріальної точки при наявності в'язкого опору
&& |
& |
2 |
x = 0 . |
(48) |
x |
+ 2βx + k |
|
Тут β = b / 2m. Рівняння (48) – це лінійне однорідне диференціальне рівняння другого порядку з постійними коефіцієнтами. Складемо характеристичне рівняння:
λ2 + 2βλ + k2 = 0. |
(49) |
119
Його корені мають наступний вид:
λ1,2 = − β ± β2 − k 2 . |
(50) |
1. Розглянемо спочатку випадок малого опору β < k.
Уведемо позначення
k1 = k 2 −β2 . |
(51) |
Тоді корені характеристичного рівняння запишуться так:
λ1,2 = − β ± ik1 ,
тобто корені характеристичного рівняння є комплексними. Загальне рішення диференціального рівняння (49) у цьому випадку записується
так:
x = e− βt (C1 sin k1 t + C2 cos k1t).
Зробивши усередині дужок перетворення аналогічно §5, одержимо
x = a e− βt sin (k1t + α), |
(52) |
причому величини а і α визначаються з початкових умов.
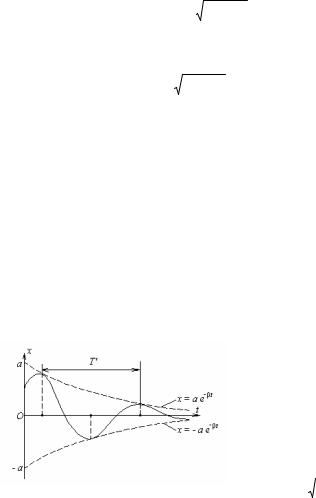
Коливання, що відбуваються за законом x = a e− βt sin (k1t + α),
називаються затухаючими, оскільки величина e− βt прагне до нуля з часом.
Графік функції (52) представлений на мал.10. Період функції sin (k1t + α) будемо називати періодом затухаю-
чих коливань:
|
T' = |
2π |
= |
|
2π |
|
|
. (53) |
|
|
|
|
|
|
|||
|
|
k1 |
k 2 −β2 |
|||||
Мал.10 |
Порівнюючи з (36), прихо- |
|||||||
|
димо до висновку, що Т’ > |
|||||||
Т, тобто при наявності опору період |
коливань збільшується. |
|||||||
Формула (52) показує, що за |
один період розмах |
коливань |
||||||
зменшується в e−βT ' раз. |
|
|
|
|
|
|
|
|
e−βT '
Величина називається декрементом затухаючих коливань, а величина βT’ − логарифмічним декрементом.
120