

Курс теоретичної механіки 2007 (Укр)
.pdf2.Граничний випадок β = k.
Уцьому випадку корені характеристичного рівняння (49) дійсні і рівні один одному:
|
λ1 = λ2 |
= − β. |
|
|
|
|
Загальне рішення рівняння (48) має вид |
|
|
|
|||
|
х = е− βt (C1 + C2 t). |
|
(54) |
|
||
|
|
|
Неважко |
перевірити, |
що |
з |
|
початкових умов |
(55) |
||||
|
|
х = хо , x =Vo при t = 0 |
||||
|
|
|
& |
|
|
|
|
випливає, що C1 = хо , C2 = Vo +βхо |
|||||
|
. Тоді рівняння руху точки |
|
|
|||
Мал.11 |
буде виглядати так: |
|
|
|||
|
х = е− βt [xo + (Vo +βхо) t]. |
|
(56) |
|
||
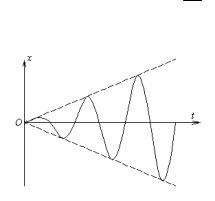
Графік функції (56) при хо > 0 і Vo |
> 0 представлений на мал. 11. З |
|||||
графіка видно, що |
рух точки |
в |
цьому |
випадку взагалі |
не |
|
носить коливального характеру, тобто він є аперіодичним.
Легко перевірити, що він є таким і при інших значеннях хо і Vo .
3.Випадок великого опору β > k.
Уцьому випадку обидва корені є дійсними і негативними
λ1 = − β + 
 β2 − k 2 , λ2 = − β −
β2 − k 2 , λ2 = − β − 
 β2 − k 2 .
β2 − k 2 .
Загальне рішення диференціального рівняння (49) представляється в наступному виді:
х = C1 exp (λ1 t) + C2 exp (λ2 t).
Визначивши значення постійних інтегрування з початкових умов (55), одержуємо рівняння руху точки
х = |
λ2 xo −Vo |
exp (λ1 t) + |
Vo − λ1xo |
exp (λ2 t). |
||
λ2 |
− λ1 |
λ2 − λ1 |
||||
|
|
|
||||
Графік цієї функції має вид, представлений на мал.11, тобто і
у цьому випадку рух є аперіодичним.
121
§8. Вимушені коливання матеріальної точки. Резонанс
Нехай тепер на матеріальну точку діють дві сили: відновлююча сида F і Q – періодично залежна від часу
Q = Qo sin pt |
(57) |
( Qo − постійна сила, спрямована уздовж осі х у додатньому її напрямку).
Сила Q = Qo sin pt називається збурюючою силою, а коливання під
дією такої сили називаються вимушеними.
Диференціальне рівняння руху точки в цьому випадку виглядає так
m&x& = −cx + Q |
o |
sin pt . |
(58) |
|
|
|
|
Розділимо обидві частини (58) на m |
|
||
&x&+ k 2 x = P |
|
sin pt |
(59) |
o |
|
|
|
(тут Ро = Qo / m ).
Це диференціальне рівняння вимушених коливань матеріальної
точки при відсутності сил опору.
Як відомо з теорії диференціальних рівнянь загальне рішення його представляється в наступному виді:
х = х1 + х2 ,
де х1 − загальне рішення однорідного рівняння (тобто рівняння (59) із правою частиною, рівної нулю), а х2 − яке або частинне рішення рівняння (59). Розглянемо два випадки.
1. Нерезонансний випадок р ≠ k (частота збурючої сили не
дорівнює частоті вільних коливань).
У цьому випадку частинне рішення х2 шукається в наступному виді
x2 = A sin pt, |
(60) |
де А − шукана постійна величина.
Підставимо вираження (60) у диференціальне рівняння (59):
122

− p2 A sin pt +k2 A sin pt = Po sin pt.
Це рівність повинна виконуватися при будь-якім значенні t, тому A (k2 − p2) = Po , тобто
|
Po |
|
А = |
|
. |
k 2 − p2 |
||
Таким чином, частинне рішення виглядає так
Po |
|
|
х2 = k 2 − p2 |
sin pt. |
(61) |
Загальне рішення однорідного рівняння було знайдено в §5
х1 = a sin (kt + α). |
|
(62) |
|
Отже, загальне рішення рівняння (59) таке |
|
|
|
х = a sin (kt + α) + |
Po |
sin pt. |
(63) |
k 2 − p2 |
|||
Величини а і α визначаються з початкових умов (55).
Формула (63) показує, що коливання точки під дією збурючої
сили у нерезонансному випадку складаються з власних коливань, що відбуваються з частотою вільних коливань, і вимушених коливань,
що відбуваються з частотою збурючої сили.
Графік залежності амплітуди вимушених коливань
| A | = |
|
Po |
|
| k |
2 − p2 | |
||
|
від частоти сили, що вимушує, представлений на мал.12.
Помітимо, що при р = 0 амплітуда | A | = Ро / k2 = Qo / c = δст . Зі збільшенням р при р < k , амплітуда вимушених коливань зростає і
при наближенні р к k вона прагне до нескінченності, потім при р > k зі зростанням р вона прагне до нуля.
Помітимо також, що при р < k знаки А и Ро збігаються, тобто фази вимушених коливань і збурючої сили збігаються, а при р > > k знак А протилежний знаку Ро , тобто фази вимушених коливань і збурючої сили, протилежні. Це значить, що коли збурюча сила спрямована вправо, точка
123
зміщається вліво, і навпаки. Мал.12
2. Резонанс р = k (частота збурючої сили дорівнює частоті
вільних коливань).
У цьому випадку частинне рішення х2 рівняння (59) шукається в наступному виді
x2 = At сos pt. |
(64) |
Підставивши його в (59), будемо мати
A = − |
Po |
, |
(65) |
|
|||
|
2p |
|
|
тобто рівняння вимушених коливань виглядає так
x2 = − Po t сos pt.
2p
Це означає, що при резонансі зі зростанням t ам-
плітуда коливань росте необмежено по лінійному закону , тобто спостерігається «роз-
гойдування» коливань (мал. 13). У цьому і полягає явище резонансу. Тому воно вважається небезпечним і в багатьох галузях техніки його намагаються уникнути.
Мал.13
§9. Вимушені коливання матеріальної точки при наявності опору
Нехай тепер матеріальна точка рухається під дією трьох сил: відновлючої сили F, обумовленою формулою (31), сили опору R (46) і збурючої сили Q (57). Диференціальне рівняння руху точки в цьому випадку
mx = −cx − bx + Qo sin pt . |
(66) |
|
&& |
& |
|
124

Розділивши обидві частини (66) на m і з огляду на прийняті в попередніх параграфах позначення, одержимо
&& |
& |
2 |
x = Po |
sin pt . |
(67) |
x |
+ 2βx + k |
|
Це диференціальне рівняння вимушених коливань при наявності
опору.
Загальне рішення його х (як і в попередньому параграфі) представляється у виді
х = х1 + х2 ,
де х1 − загальне рішення однорідного рівняння (тобто рівняння (67) із правою частиною, рівної нулю), а х2 − яке або частинне рішення рівняння (67). Помітимо, що х1 визначає так звані власні коливання, х2
– вимушені коливання.
Вид рішення х1 при різних співвідношеннях параметрів β і k приведений у §7, причому там було показано, що власні коливання, обумовлені цим рішенням, є затухаючими і після деякий проміжок часу практично зникають, тобто загальне рішення для досить великих значень t збігається з х2.
Частинне рішення х2 будемо шукати в наступному виді:
х2 = А sin (pt − γ), |
(68) |
де А и γ − постійні параметри, що підлягають визначенню. Підставляючи (68) у рівняння (67), одержимо
A(−p2 + k2 ) sin (pt − γ) + 2βp cos (pt − γ) = |
|
= Po [ cos γ sin (pt − γ) + sin γ cos (pt − γ)]. |
(69) |
Для того щоб рівність (69) виконувалося при будь-яких значеннях t необхідно, щоб коефіцієнти при sin (pt − γ) і cos (pt − γ) у лівій і правій частинах рівності були рівні:
A (k2 − p2) = Po cos γ, 2βpA = Po sin γ. (70)
Зводячи рівності (70) у квадрат і складаючи їх, одержуємо
125

A = |
|
Po |
|
|
. |
|
(71) |
|
|
|
|
|
|
|
|
|
|||
|
|
(k 2 − p2 )2 + 4β2 p2 |
|
|
|
||||
|
|
Мал.14 |
|
|
|
|
Розділимо другу рівність (70) на пер- |
||
шу |
|
|
|
|
|
|
|
|
|
|
|
|
tg γ = |
|
2βp |
. |
(72) |
||
|
|
|
k |
2 − p2 |
|||||
|
|
|
|
|
|
|
|
||
Рівності (71) і (72) визначають амплітуду і фазу вимушених коли- вань. Графік залежності амплітуди від частоти сили, приведений на мал.14. Як випливає з залежності (71), а також із графіка на мал.14, амплітуда А при будь-якім значенні р, навіть при p = k, приймає кінцеве значення.
§10. Динаміка відносного руху матеріальної точки
Розглянемо рух матеріальної точки М відносно деякої системи відліку xyz, що виконує довільний рух відносно інерціальної системи відліку xoyozo (мал.15). Очевидно, система відліку xyz узагалі
говорячи не є інерціальною.
Рух точки відносно інерціальної системи відліку xoyozo будемо вважати абсолютним, рух її відносно системи відліку xyz будемо вважати відносним, а рух системи xyz відносно xoyozo − переносним.
Складемо основне рівняння динаміки точки для її руху відносно інерціальної системи xoyozo
|
n |
Мал.15 |
maa = ∑Fk . |
|
k=1 |
За теоремою Коріоліса |
|
|
aa = a + ae +ak, |
де через а позначене прискорення точки відносно системи відліку xyz. Підставивши це в основне рівняння динаміки, будемо мати
126
n
ma = ∑Fk − mae − mak .
k=1
Уведемо наступні визначення.
Переносної силою інерції називається вектор, обумовлений за формулою
Je = −mae .
Коріолісовою силою інерції називається вектор, обумовлений за формулою
Jk = −mak .
З урахуванням цих визначень одержуємо
n |
|
ma = ∑Fk + Je + Jk . |
(73) |
k=1
Рівність (73) зветься основним рівнянням динаміки для відносного руху точки. Таким чином, при складанні основного рівняння
динаміки відносного руху точки необхідно до діючих на точку сил
додати переносну і коріолісову сили інерції.
Розглянемо окремі випадки.
1) Переносний рух поступальний. У цьому випадку Jk , так як і ak дорівнює нулю, і основне рівняння приймає наступний вид:
n
ma = ∑Fk + Je .
k=1
2)Переносний рух поступальний, рівномірний і прямолінійний. У
цьому випадку Jе = Jk = 0 і основне рівняння динаміки приймає такий же вид, як і при русі точки відносно інерціальної системи відліку
n
ma = ∑Fk .
k=1
Це означає, що система відліку, що рухається відносно
інерціальної поступально, рівномірно і прямолінійно сама є інерціальною.
3)Точка нерухома в рухливій системі координат (знаходить-ся в стані відносного спокою). У цьому випадку відносне прискорення а = 0, а також Jk = 0, оскільки Vr = 0. Основне рівняння приймає вид
127

n
∑Fk + Je = 0 .
k=1
Таким чином, при визначенні положення відносного спокою
необхідно до всім діючих на точку силам додати переносну силу інерції.
Приклад. Рух матеріальної точки уздовж поверхні Землі.
Як приклад вивчення відносного руху точки розглянемо її рух по поверхні Землі (мал.16). Нехай точка рухається в північній півкулі в меридіональному напрямку з півдня на північ. Легко переконатися, використовуючи правило Жуковського побудови Коріолісова прискорення, що Коріолісова сила інерції буде мати напрямок, зазначений на кресленні, тобто вправо відносно напрямку руху точки.
При русі в інших напрямках у північній півкулі коріолісова сила інерції має складову, спрямовану в такий спосіб. Це означає, що при русі точки по зем-
|
ній поверхні в північній півкулі вона |
|
відхиляється вправо відносно напря- |
|
мку руху. Цим порозумівається те, що в |
|
північній півкулі ріки підмивають пра- |
|
вий берег, і тому він крутіше лівого (за- |
|
кон Бера). У південній півкулі точка |
|
відхиляється уліво від напрямку руху і |
|
відповідно до цього ріки підмивають |
Мал.16 |
лівий берег. Тому він крутіше правого. |
.
128
129

Г Л А В А II
ДИНАМІКА МЕХАНІЧНОЇ СИСТЕМИ І ТВЕРДОГО ТІЛА
§1. Механічна система. Зовнішні і внутрішні сили
Механічною системою називається сукупність матеріальних
точок, взаємодіючих один з одним.
Класичним прикладом механічної системи є Сонячна система, у якій усі тіла взаємодіють один з одним за допомогою сил взаємного гравітаційного притягання.
Тверде тіло також являє собою механічну систему, що складається з часток, що утворять тіло.
Сили, що діють на точки механічної системи, поділяються на двох категорій:
1)зовнішні сили,
2)внутрішні сили.
Зовнішніми називаються сили, джерелами яких є матеріальні точки, що не належать даній механічній системі.
Внутрішніми називаються сили взаємодії між точками даної
механічної системи.
Зовнішні сили будуть позначатися символом Fe, внутрішні – символом Fi.
Властивості внутрішніх сил.
1) Головний вектор внутрішніх сил дорівнює нулю.
Розглянемо дві які-небудь точки механічної системи Мk і Мп (мал.17). По четвертому законі Ньютона вони взаємодіють за допомогою двох прямопротилежных сил
Мал.17 |
F i |
і F i , геометрична сума до- |
|
k |
n |
торых дорівнює нулю. Оскільки внутрішні сили складаються з таких попарно прямопротилежных сил, те їхній головний вектор (тобто загальна геометрична сума) дорівнює нулю.
2)Головний момент внутрішніх сил відносно будь-якого полюса дорівнює нулю.
130