

9.2. Применение интегрирующих вычислительных структур для реализации систем управления манипуляционными устройствами автономных роботов
Проектирование системы управления движением манипулятора является одной из основных проблем при разработке системы управления автономным роботом (АР) [36].
Известные методы разработки систем управления движением на основе динамических моделей манипуляторов базируются на сложном программировании для ЭВМ алгоритмов решения систем нелинейных дифференциальных уравнений . Основные проблемы сводятся к следующим:
использование матричных моделей, предлагаемых, например, в работах М. Е. Кана, М. Вукобратовича, Г. В. Коренева, Е. П. Попова и других авторов, требует значительного быстродействия ЭВМ и большого объема оперативной памяти для управления движением и анализа качества системы управления;
в основе решения систем нелинейных дифференциальных уравнений лежит метод линеаризации, что вносит погрешноети в результат решения или моделирования;
использование для решения задачи управления движением ЭВМ общего назначения со стандартным набором программных средств затрудняет возможность управления манипулятором автономного робота (MAP) в реальном времени, поскольку для интегрирования уравнений используются последовательные рекуррентные методы;
создание на базе ЭВМ общего назначения вычислителя, который по своим техническим характеристикам (масса, габариты, быстродействие, точность и т. д.) может быть установлен непосредственно на АР, сопряжено с определенными сложностями.
Необходимо отметить, что, кроме задачи управления движением манипулятора АР, на управляющую ЭВМ возлагаются функции зрительного восприятия и распознавания объектов, анализа ситуаций и выработки программ действий АР. Следовательно, задача построения вычислителя для управления движением манипулятора в реальном времени с допустимой погрешностью и с ограничениями на весогабаритные характеристики является актуальной.
Использование специализированных вычислительных устройств (СВ), допускающих глобальное распараллеливание вычислений и имеющих структуру, достаточно просто выполнимую в микроэлектронном исполнении в виде БИС, позволит решить данную задачу. Основу таких СВ составляют специализированные микропроцессоры, структурно реализующие системы дифференциальных уравнений для функциональных зависимостей, входящих в описание системы уравнений движения манипуляторов АР.
Уравнения динамики движения манипулятора АР представлены в форме уравнений Лагранжа 2-го рода, имеющих для i-й координаты следующий вид:
(9.9)![]()
где
![]() – функция Лагранжа;
– функция Лагранжа;
![]() –кинематическая и
потенциальная энергии системы;
–кинематическая и
потенциальная энергии системы;
Qi – обобщенные моменты неконсервативных сил;
i – обобщенные координаты манипулятора.
Уравнение (9.9) можно
привести к сумме линейной формы от
величин ![]() или квадратичной формы от
или квадратичной формы от
![]() с соответствующими коэффициентами,
т.е.
с соответствующими коэффициентами,
т.е.
(9.10)![]()
где коэффициенты
![]() – функции от обобщенных координат
– функции от обобщенных координат
![]() .
.
Выбор в качестве
динамической модели уравнений Лагранжа
основывается на следующих соображениях.
Если за альтернативный вариант выбрать
метод, использующий вычисление «энергии
ускорений» системы, или функцию Гиббса,
то можно оценить трудоемкость использования
данного варианта при реализации на ЭВМ.
Функция Гиббса является квадратичной
формой относительно координат![]()
(9.11)![]()
Данное выражение определяет уравнения движения в следующем виде:
(9.12)![]()
Для манипуляторов,
как известно, функция Гиббса i-го
звена вычисляется по формуле, в которую
входят суммы величин векторов
![]() их квадратов и произведений. Кроме того,
для получения векторов
их квадратов и произведений. Кроме того,
для получения векторов![]() используются матрицы переходов от
системы координат (i
– 1)-го звена к системе координат i-го
звена манипулятора. После вычисления
обобщенных моментов сил
используются матрицы переходов от
системы координат (i
– 1)-го звена к системе координат i-го
звена манипулятора. После вычисления
обобщенных моментов сил
![]() производится интегрирование методом
Рунге-Кутта для получения ускорений.
Отсюда видно, что реализация данной
динамической модели программным или
структурным методом неэкономна, так
как в первом случае основное время счета
процессора ЭВМ приходится на обращение
матриц и последовательное интегрирование
нелинейных дифференциальных уравнений;
во втором случае резко возрастает объем
оборудования моделирующей установки,
хотя и достигается глобальное
распараллеливание вычислений.
производится интегрирование методом
Рунге-Кутта для получения ускорений.
Отсюда видно, что реализация данной
динамической модели программным или
структурным методом неэкономна, так
как в первом случае основное время счета
процессора ЭВМ приходится на обращение
матриц и последовательное интегрирование
нелинейных дифференциальных уравнений;
во втором случае резко возрастает объем
оборудования моделирующей установки,
хотя и достигается глобальное
распараллеливание вычислений.
Исходя из этого можно сделать вывод о том, что непосредственное интегрирование суммы линейной и квадратичной форм, полученных из уравнения (9.9), проще, чем реализация алгоритма для функции Гиббса как программно на ЭВМ общего назначения, так и в структурном виде на СМП.
Для реализации уравнения i-го звена необходимо иметь блок СМП для интегрирования уравнений вида
(9.13)
блок СМП для вычисления векторов коэффициентов
![]() ,
,
являющихся
тригонометрическими функциями координат![]() ;
блок СМП для вычисления вектора
;
блок СМП для вычисления вектора
![]() блок СМП для образования произведений
элементов векторов
блок СМП для образования произведений
элементов векторов ![]() на соответствующие координаты
на соответствующие координаты ![]() и блок образования линейной и квадратичной
форм. Достоинством данной организации
вычислений является возможность
отработки модели АР в реальном времени
при динамическом изменении законов
управления АР. Это достигается наличием
в моделирующей установке, кроме СМП,
небольшого ОЗУ для хранения результатов
моделирования и логического преобразователя,
способного по внешним сигналам изменять
коммутацию СМП, что существенно облегчает
отладочный режим работы.
и блок образования линейной и квадратичной
форм. Достоинством данной организации
вычислений является возможность
отработки модели АР в реальном времени
при динамическом изменении законов
управления АР. Это достигается наличием
в моделирующей установке, кроме СМП,
небольшого ОЗУ для хранения результатов
моделирования и логического преобразователя,
способного по внешним сигналам изменять
коммутацию СМП, что существенно облегчает
отладочный режим работы.
Однако при
проектировании СВ робота, способного
работать в автономном режиме, такая
организация вычислений мало приемлема
вследствие значительного объема блоков
СМП, требующихся для структурной
реализации динамической модели
манипулятора АР. В этом случае моделирование
наиболее целесообразно производить
при неполном распараллеливании
вычислений, когда, например, параллельно
получаются величины ![]() и их формы для определения координаты
i
i-гo
звена манипулятора.
и их формы для определения координаты
i
i-гo
звена манипулятора.
Объем оборудования
при этом можно связать зависимостью с
показателем параллельности как
![]() ,
где
в первом приближении оценивается как
отношение величин X и Y (X – число величин,
необходимых для параллельного получения
выходных величин системы; У– общее
число различных величин, входящих в
уравнения системы;
,
где
в первом приближении оценивается как
отношение величин X и Y (X – число величин,
необходимых для параллельного получения
выходных величин системы; У– общее
число различных величин, входящих в
уравнения системы;
![]() .
Так, например, если принять для
рассматриваемой системы одновременное
получение величин
.
Так, например, если принять для
рассматриваемой системы одновременное
получение величин![]() ,
то показатель параллельности имеет вид
,
то показатель параллельности имеет вид
![]() =
5/5S
= =1/S
и при S = 10
= 0,1. Этому показателю
=
5/5S
= =1/S
и при S = 10
= 0,1. Этому показателю
![]() соответствует объем оборудования (число
СМП)
соответствует объем оборудования (число
СМП)![]() .
Если увеличить
в 10 раз, т. е. перейти от структурно-программного
способа к структурному, то соответственно
объем
.
Если увеличить
в 10 раз, т. е. перейти от структурно-программного
способа к структурному, то соответственно
объем
![]() также возрастет в
также возрастет в![]() раз. Изменяя показатель распараллеливания,
можно в первом приближении получить
оптимальный объем СВ.
раз. Изменяя показатель распараллеливания,
можно в первом приближении получить
оптимальный объем СВ.
Что касается точности решения системы уравнений динамики манипулятора АР, то исходя из условий технического задания на проектирование СВ для управления манипулятором АР можно выбрать необходимую длину обрабатываемого слова СВ, полосу его пропускания Fгр, обеспечивающие точность на интервале решения Т, по методике, описанной в разделе 5.5.
Схемы организации вычислений и структура СВ представлены на рис. 9.9, 9.10. СВ имеет в составе блок СМП, параллельно вычисляющих заданный набор величин, регистровую коммутирующую среду, позволяющую организовать связь СМП между собой, каналы прямого доступа к памяти (КПДП), память, хранящую промежуточные результаты и выходные величины системы при последовательной обработке данных для каждого звена манипулятора АР.
В результате изложенного можно сделать следующие выводы. Поскольку для реальных манипуляторов Fгр соответствует единицам герц, то обеспечение решения уравнений динамической модели в реальном времени на серийной элементной базе (например, серия К502) представляется вполне возможным.
На основе СМП, варьируя показатель параллелизма вычислений, можно проектировать как моделирующие установки, имеющие преимущества при отработке моделей манипуляторов АР и законов управления ими перед ЭВМ общего назначения, так и СВ, которые по своим техническим характеристикам способны обеспечить автономный режим работы робота.
Таким образом, специализированные вычислители на базе СМП имеют следующие достоинства:
1) отсутствие погрешности линеаризации при переходе от нелинейных уравнений к их линеаризованной форме в процессе воспроизведения на СВ решений дифференциальных уравнений;
2) возможность построения на основе СМП вычислителей, работающих в реальном времени с распараллеливанием вычислений и удовлетворяющих ограничениям по техническим характеристикам (объем V оборудования, масса, габариты, Fгр, точность и т. д.);
3) возможность построения отладочных СВ с применением логического преобразователя для анализа динамики движения манипулятора АР, которые используют различные динамические модели (функции Гиббса, уравнения Лагранжа и т. д.) с применением логического преобразователя для анализа динамики движения манипулятора АР при глобальном распараллеливании вычислений в реальном времени;

Рис. 9.9. Организация вычислений на СВ АР

Рис. 9.10. Структура специализированного вычислителя на специализированном микропроцессоре с регистровой коммутацией
4) возможность обеспечения заданных характеристик по техническому заданию на проектирования заданного класса вычислительных устройств, ввиду больших значений Fгр для манипулятора АР.
Рассмотрим еще один подход к вопросу проектирования модели системы управления движением манипулятора адаптивного робота с использованием понятий нечетких алгоритмов (НА). Это дает возможность отразить реальную обстановку, в которой приходится управлять роботом-манипулятором, а также упростить процесс вычислений в ЭВМ, выбирая каждый раз фиксированное число операторов для расчета управляющих воздействий.
Понятия нечетких множеств (НМ), нечетких алгоритмов, операций над ними базируются на следующих определениях .
Нечеткое множество
Z обычного множества N характеризуется
функцией принадлежности
![]() ставящей в соответствие каждому элементуnN
число на отрезке [0, 1], которое описывает
степень принадлежности n
множеству Z.
ставящей в соответствие каждому элементуnN
число на отрезке [0, 1], которое описывает
степень принадлежности n
множеству Z.
Носителем НМ Z
является подмножество
![]() для элементов которого функция
для элементов которого функция![]()
![]() если N
имеет континуума;
если N
имеет континуума;
![]() если |N|
= k.
если |N|
= k.
Обычно НМ Z
представляется k-мерным
вектором с ![]() в
качестве i-гo
элемента
в
качестве i-гo
элемента
![]()
Операции над НМ определяются следующим образом.
В к л ю ч е н и е
НМ.Z2
включает
![]() тогда и только, когда
тогда и только, когда ![]() для всех nN.
для всех nN.
О б ъ е д и н е н и
е НМ (логическое ИЛИ).
![]()

Нечеткие алгоритмы связаны с использованием лингвистических переменных и представляют собой последовательности правил, часть из которых может содержать лингвистическую переменную (название НМ).
Применение обычных методов построения систем управления роботом-манипулятором, как показано выше, предполагает использование моделей в виде уравнений Латранжа (9.9) или функции Гиббса (9.11), как наиболее часто встречающихся. Эти зависимости определяют движения манипулятора в виде выражений (9.10) или (9.12).
Если к уравнению Лагранжа, например, добавить соответствующие уравнения для определения положения манипулятора в пространстве в декартовых координатах

где функции
![]() - тригонометрические зависимости углов
- тригонометрические зависимости углов![]() а также ввести уравнения для моментовMi
в виде
а также ввести уравнения для моментовMi
в виде
![]() гдеFi
- дифференциальное уравнение для Mi
относительно координат i-гo
звена МАР
гдеFi
- дифференциальное уравнение для Mi
относительно координат i-гo
звена МАР ![]() и программного угла
и программного угла ![]() ,
задаваемого программой движения MAP, то
совокупность данных уравнений определит
алгоритм работы системы управления
движением робота-манипулятора (рис.
9.11) с параметрами управления
,
задаваемого программой движения MAP, то
совокупность данных уравнений определит
алгоритм работы системы управления
движением робота-манипулятора (рис.
9.11) с параметрами управления ![]()

Рис. 9.11. Алгоритм системы управления движением манипулятора автономного робота
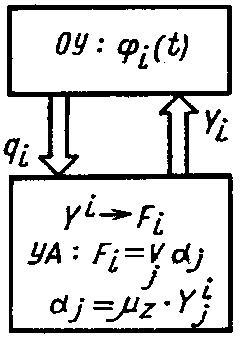
Рис. 9.12. Процесс управления манипулятором
О
 сновной
задачей управления при этом будет
являться задача приведения MAP в заданную
целевую точку
сновной
задачей управления при этом будет
являться задача приведения MAP в заданную
целевую точку![]() путем получения минимальных рассогласований
угла
путем получения минимальных рассогласований
угла![]() и текущего угла
и текущего угла
![]() ,
т. е. достижения
,
т. е. достижения![]() .
.
Процесс управления
роботом-манипулятором можно представить
в виде взаимодействия двух частей:
манипулятора как объекта управления
(ОУ) и системы управления манипулятором
как управляющего автомата (УА) с каналами
передачи информации (рис. 9.12). Взаимодействие
ОУ и УА происходит по нечеткому алгоритму,
построенному из нечетких инструкций,
при этом считается, что каждая из этих
инструкций содержит четкие управляющие
операторы Yi
из совокупности Y
(операторы УА), нечеткие условия zi
из совокупности Z (операторы ОУ). Под
воздействием четкого оператора управления
![]() поступающего с выхода УА на вход ОУ,
последний вырабатывает четкий сигнал
величинойq,
qQ,
где Q
– базовое множество НМ из Zi.
Тогда задача определения по данному
НА, какой следующий оператор
поступающего с выхода УА на вход ОУ,
последний вырабатывает четкий сигнал
величинойq,
qQ,
где Q
– базовое множество НМ из Zi.
Тогда задача определения по данному
НА, какой следующий оператор
![]() должен выполняться, сводится к задаче
нечеткой инструкции из Z, к которой
относится величинаq.
должен выполняться, сводится к задаче
нечеткой инструкции из Z, к которой
относится величинаq.
Следовательно,
задача приведения MAP в заданную целевую
точка
![]() в предположении, что основными параметрами
управления манипулятором являются
текущий угол
в предположении, что основными параметрами
управления манипулятором являются
текущий угол![]() и программный угол
и программный угол ![]() т. е.
т. е.
![]() ,
будет иметь следующую интерпретацию.
,
будет иметь следующую интерпретацию.
Под воздействием
четкого управляющего оператора
![]() поступающего из системы управления
роботом-манипулятором, последний,
отрабатывая
поступающего из системы управления
роботом-манипулятором, последний,
отрабатывая![]() ,
выдает четкий сигнал обратной связи –
текущий угол разворота звена MAP–величиной
,
выдает четкий сигнал обратной связи –
текущий угол разворота звена MAP–величиной
![]() F
где F
- базовое множество для НМ Di
с функцией принадлежности, определяемой
критерием достижения целевой точки, т.
е.
F
где F
- базовое множество для НМ Di
с функцией принадлежности, определяемой
критерием достижения целевой точки, т.
е.
![]()
если углы заданы
в радианах и максимальный угол разворота
![]() .
В этом случае определение следующего
выполняемого оператора
.
В этом случае определение следующего
выполняемого оператора
![]() по заданному НА производится путем
определения НМ
по заданному НА производится путем
определения НМ![]() ,
у которого величина
,
у которого величина![]()
Так как НА можно представить в виде совокупности правил перехода от оператора Yi к другим операторам при различных нечетких условиях Zi как
![]() ,
,
![]()
![]()
то формально
решение задачи определения следующего
выполняемого оператора
![]() запишется следующим образом:
запишется следующим образом:
![]()
![]()
![]() .
.
Следовательно, с
определением максимального значения
![]() для
для
![]() выясняется, к какому условию
выясняется, к какому условию
![]() относится величина
относится величина![]() и выполняется переход
и выполняется переход
![]() .
Реально это означает, что для системы
управления найдена величина наибольшего
рассогласования
.
Реально это означает, что для системы
управления найдена величина наибольшего
рассогласования![]() и в данный момент времени необходимо
перейти к выполнению оператора
и в данный момент времени необходимо
перейти к выполнению оператора![]() из совокупности управляющих операторов,
уравнение которого описывает закон
изменения угла
из совокупности управляющих операторов,
уравнение которого описывает закон
изменения угла ![]() .
.
Таким образом,
применение нечеткого алгоритма управления
позволяет на каждом этапе, анализируя
сигнал обратной связи
![]() от датчикаl-го
звена MAP, выбрать тот управляющий оператор
от датчикаl-го
звена MAP, выбрать тот управляющий оператор
![]() который будет воздействовать на звеноl,
способствуя достижению целевой точки
который будет воздействовать на звеноl,
способствуя достижению целевой точки
![]() ,
динамически перераспределяя мощность
вычислительного устройства системы
управления и учитывая состояние внешней
среды (реальной обстановки) .
,
динамически перераспределяя мощность
вычислительного устройства системы
управления и учитывая состояние внешней
среды (реальной обстановки) .
Использование
нечетких алгоритмов для выбора управляющих
операторов
![]() позволяет: контролировать реальное
положение робота-манипулятора во внешней
среде, оценивая текущую разность
позволяет: контролировать реальное
положение робота-манипулятора во внешней
среде, оценивая текущую разность
![]() и с помощью функции
и с помощью функции![]() производить коррекцию траектории с
любой, наперед заданной точностью
позиционирования
производить коррекцию траектории с
любой, наперед заданной точностью
позиционирования![]() ,
определяемой в пределе чувствительностью
датчиков MAP. Избирательность системы
управления, основанная на определения
максимального значения функций
,
определяемой в пределе чувствительностью
датчиков MAP. Избирательность системы
управления, основанная на определения
максимального значения функций![]() для звеньев MAP, позволяет вычислять на
каждом отрезке времени
для звеньев MAP, позволяет вычислять на
каждом отрезке времени![]() один управляющий оператор
один управляющий оператор![]() ,
осуществляющий коррекцию i-гo
эвена, тем самым производя динамическое
распределение загрузки вычислительного
устройства системы управления. Это, в
свою очередь, ведет к сокращению
структурной сложности управляющей ЭВМ
параллельного типа и делает реальным
применение микропроцессоров.
,
осуществляющий коррекцию i-гo
эвена, тем самым производя динамическое
распределение загрузки вычислительного
устройства системы управления. Это, в
свою очередь, ведет к сокращению
структурной сложности управляющей ЭВМ
параллельного типа и делает реальным
применение микропроцессоров.