

Глава девятая. Примеры проектирования проблемно- ориентированных мвс на интегрирующих структурах
9.1. Моделирующий вычислительный комплекс для исследования систем инерциальной навигации на основе модульных ивс
Современное развитие авиации и космической техники предъявляет новые, более высокие требования к средствам навигации и управления движущимися объектами. Этим требованиям в настоящее время в достаточной степени отвечают инерциальные навигационные системы (ИНС), в которых текущее местоположение объекта определяется интегрированием измеряемых ускорений.
Одним из важнейших этапов процесса проектирования ИНС является полунатурное, или имитационное, моделирование ИНС. При этом задачи моделирования эффективнее всего могут быть решены на таких вычислительных средствах, которые обладают способностью к перестройке своей внутренней структуры, т. е. легко осуществляют коммутацию между обрабатывающими и управляющими ячейками и блоками; перераспределяют функциональное назначение между блоками; обеспечивают взаимозаменяемость блоков и наращивание вычислительной мощности. Эти вычислительные средства представляют собой многопроцессорные вычислительные структуры (МВС) типа MIMDS (Multi-Instruction-Multi-Data-Structurally).
В настоящее время полунатурное моделирование представляет собой один из основных этапов при проектировании ИНС. Единственным средством для такого моделирования являются динамические моделирующие комплексы (ДМК), которые позволяют провести моделирование ИНС в различных вариантах и в реальном масштабе времени [36]. Так как внешняя информация поступает в ИНС с гироскопических устройств (ГУ) через различные преобразователи, то одной из основных задач при проектировании является улучшение динамических характеристик ИНС. ДМК позволяет решать ряд вопросов, связанных с идентификацией ГУ их математическим моделям и анализом результатов моделирования, исследованием динамической точности и уходов ГУ, разработкой методик анализа ГУ на допустимые отклонения и надежность.
В моделирующих комплексах для управления ГУ применяются, как правило, специализированные вычислительные устройства (СВУ). Это обусловлено тем, что ДМК решает ряд фиксированных задач и от СВУ требуется обеспечить максимальную производительность при обработке информации, поступающей с различных преобразователей реальной аппаратуры ИНС. Для обеспечения заданной точности моделирования ИНС в реальном времени на заданном интервале моделирования необходимо правильно произвести выбор вычислительных средств моделирующего комплекса.
Один из способов решения данной задачи заключается в построении ДМК на основе многомашинного вычислительного комплекса, имеющего в своем составе как универсальные, так и специализированные ЭВМ [23,36,41,42,48,49,52,63,89,119].
Моделирующий вычислительный комплекс (МВК) исходя из требований к ДМК по характеру решаемых задач должен обеспечить исследование ИНС от варианта, когда ИНС полностью представлена реальной аппаратурой, до варианта, когда ИНС полностью представлена своей имитационной моделью. Предполагается, что в состав ИНС входит собственный специализированный вычислитель (СВ), и дальнейшее исследование ИНС производится в совокупности с ним.
Поскольку одним из основных требований к МВК является требование работы в реальном времени, предлагается распараллелить задачу для МВК между ЭВМ и интегрирующей вычислительной структурой (ИВС) на уровне крупных программных фрагментов имитационной модели ИНС. Как правило, модели ИНС могут включать в свой состав следующие части: модель идеального движения (МИД); модель гироплатформы (МГ) с подвижным основанием; модели преобразователей информации; программу для алгоритма решения навигационных задач, реализуемых в СВ ИНС.
Для построения структурной схемы МВК приведем модели идеального движения гироплатформы:
1) модель идеального движения (ИД) объекта имеет следующую формальную схему:
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
(9.1)


![]()
![]()
![]()
где
![]() –
векторы модельных скоростей и измеряемых
на объекте ускорений;
–
векторы модельных скоростей и измеряемых
на объекте ускорений;
h(t) – текущая высота полета;
![]() – матрица
направляющих косинусов (модельных);
– матрица
направляющих косинусов (модельных);
![]() ПУ
– навигационные параметры объекта
(широта, долгота, азимут, путевой угол):
ПУ
– навигационные параметры объекта
(широта, долгота, азимут, путевой угол):
ar, ав – горизонтальная и вертикальная составляющие вектора ускорения;
р – угловая скорость разворота, которые имитируют профиль полета;
2) модель гироплатформы с подвижным основанием имеет следующую формальную схему:
![]()


(9.2)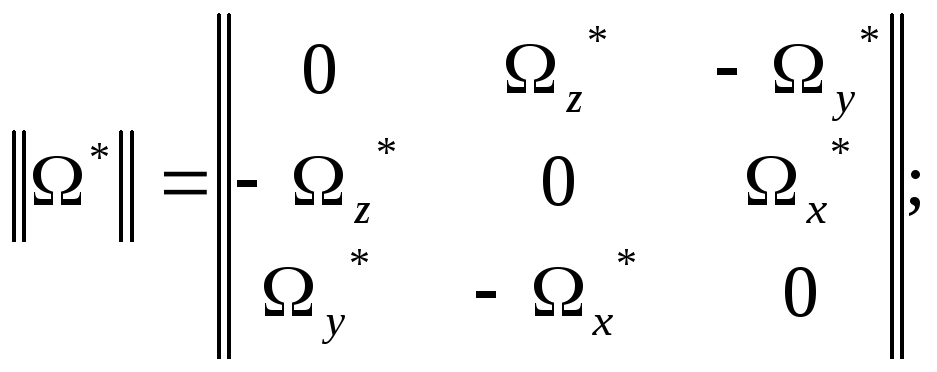
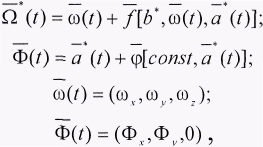
где |В*| – скорректированная матрица направляющих косинусов;
![]() –сигнал управления
гироплатформой;
–сигнал управления
гироплатформой;
![]() – сигналы
управления ГП, вырабатываемые бортовой
ЭВМ;
– сигналы
управления ГП, вырабатываемые бортовой
ЭВМ;
![]() –сигналы с
акселерометров гироплатформы;
–сигналы с
акселерометров гироплатформы;
![]() - величины коррекции
вектора модельных ускорении.
- величины коррекции
вектора модельных ускорении.
На основании этих моделей вариант исследования ИНС при отсутствии ГП можно представить структурной схемой алгоритмов (9.2), рис. 9.1. Общая структурная схема МВК изображена на рис. 9.2.
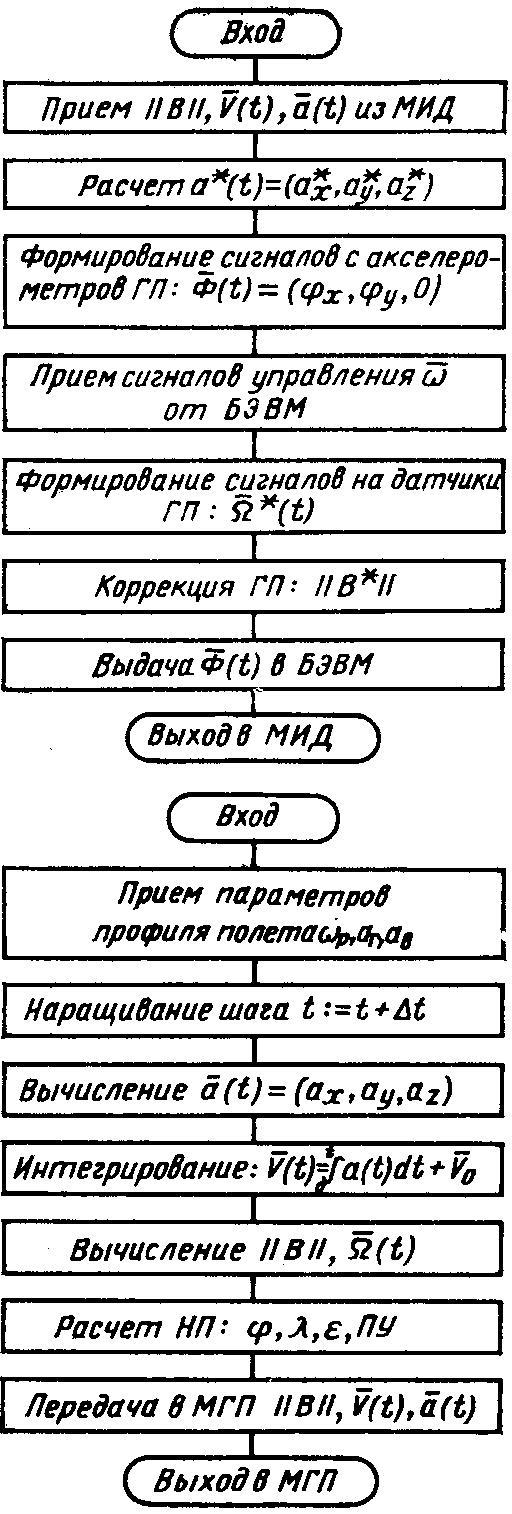
Рис. 9.1 Исследование инерциальной навигационной системы с моделью гироплатформы

Рис. 9.2 Общая структурная схема МВК
Исследование ИНС с помощью МВК можно провести в следующих вариантах.
1) исследование ошибок ИНС, когда инерциальная система полностью представлена реальной аппаратурой. Здесь предполагается, что на МВК реализуется модель ИД (9.1) и результаты моделирования сравниваются с навигационными параметрами, получаемыми с ИНС. Так как ГУ с подвижным основанием находится на определенном месте, то в результате анализа выявляются ошибки ИНС, не связанные с возмущениями при реальном движения (рис. 9.3);
2) исследование ИНС при имитации реального движения. В этом случае производится идентификатор ГУ ИНС их математическими моделями: МВК реализуется как модель ГУ; реальная аппаратура представлена СВ ИНС и различными преобразователями. Данные из модели ИД поступают в модель ГУ, которая выдает информацию на вычислитель ИНС. После просчета программы решения навигационных задач СВ выдает в модель ГУ величины, соответствующие сигналам управления ГУ. В результате моделируется реальное движение с возмущающими воздействиями. По данным моделирования производится анализ и корректировка математической модели ГУ;

Рис. 9.3 Исследование погрешностей инерциальной навигационной системы
3) исследование ИНС, когда моделируются различные преобразователи информации с целью выявления ошибок, вносимых ими в контур управления, или моделируется полностью вся инерциальная навигационная система с собственным СВ.
Модель ИД (9.1)
описывается системой алгебраических
и дифференциальных уравнений, поэтому
исходя из требований работы в реальном
масштабе времени для реализации модели
ИД в МВК (рис. 9.1)
включается
интегрирующая вычислительная система
(ИВС). Последняя представляет собой
набор специализированных микропроцессоров,
способных воспроизводить набор базисных
операторов структурным
образом, распараллеливая вычислительный
процесс во времени и в пространстве.
Каждый СМП состоит из операционной
части, осуществляющей численное
интегрирование системы порождающих
дифференциальных уравнений Шеннона
для некоторой элементарной функции,
входящей в математическое
описание модели ИД, по формулам вида
![]() ,
или в интегральной
форме производят вычисление интеграла
Стилтьеса для функции f(t):
,
или в интегральной
форме производят вычисление интеграла
Стилтьеса для функции f(t):

![]()
Вся операционная часть СМП воспроизводит структурным образом систему таких уравнений или некоторый оператор вида
![]() – множество
решений системы уравнений Шеннона для
функции
f(t).
– множество
решений системы уравнений Шеннона для
функции
f(t).
Кроме того, в состав СМП входит коммутатор, позволяющий организовывать в ИВС различные связи СМП, и управляющий автомат, перестраивающий СМП на реализацию оператора из набора базисных операторов.
Однородность структуры ИВС на уровне микропроцессоров позволяет наращивать мощности простым подключением дополнительных СМП через систему коммутации ИВС.
В состав МВК может входить также ЭВМ общего назначения, имеющая магистраль для связи со стандартными периферийными устройствами. При выборе структуры такой ЭВМ необходимо учитывать следующие основные факторы:
параллельность обработки информации, т.е. в МВК в различных вариантах исследования ИНС модели ИД, ГУ, преобразователей и т.п. реализуется автономно на отдельных вычислительных средствах комплекса. Обмен информацией между моделями или реальной аппаратурой производится синхронно через блоки связи;
наличие общей базы данных для моделей и программы анализа результатов моделирования;
возможность исследования различных алгоритмов решения навигационных задач для СВ ИНС;
возможность прямого обращения к памяти, т.е. жесткие временные ограничения на цикл процессора управляющей ЭВМ общего назначения требуют обмена с ЭВМ без прерываний.
По результатам моделирования систем уравнений, являющихся основными для полной задачи управления и навигации, проведена отработка алгоритмов решения задачи на СВ, определены точности решения, уточнены масштабные коэффициенты, выбраны структуры и параметры функциональных блоков СВ.
Исследования показали, что для решения навигационных задач и управления полетом самолета одним из вариантов СВ является вычислитель, построенный на основе ИВС [36, 38, 40, 43, 49, 56].
Исходя из анализа результатов, полученных при моделировании исходных систем уравнений и циклограмм, по режимам настройки комплекса разработан специализированный цифровой вычислитель (рис. 9.4), который имеет следующие узлы и блоки: устройство ввода (УВВ), устройство управления (УУ), решающую часть (РБ), устройство вывода (УВыв); долговременное запоминающее устройство (ЗУБРИ).

Рис. 9.4 Структурная схема специализированного цифрового вычислителя «Вычислитель-1»
Устройство ввода (УВВ) обеспечивает прием информации с блока связи бортовой ЭВМ (БС), устройства ввода на индикацию (УВИ), блока связи бортовой цифровой ЭВМ (БЭВМ), преобразователя «импульс-код», аналого-цифрового преобразователя управления (АЦПУ), долговременного запоминающего устройства (ЗУБРИ) по соответствующим каналам и передачу информации в виде приращений на решающую часть (РБ), а также выдачу управляющих команд и серий на считывание данной информации.
Устройство управления синхронизирует работу СВ с БЭВМ и УВВ вычислительного комплекса по управляющим командам, потенциалам и сериям, выдаваемым программно-временным устройством (ПВУ), БС УВИ и ВС БЭВМ.
Устройство вывода обеспечивает передачу информации из решающей части СВ в БС БЭВМ, БС УВИ, цифро-аналоговый преобразователь (ЦАП), а также вырабатывает управляющие потенциалы и серии на запись информации в соответствующие устройства.
Решающая часть специализированного вычислителя обеспечивает расчет в реальном масштабе времени величин, необходимых для нормальной работы комплекса во всех режимах, а также выдачу этих величин согласно циклограмме работы комплекса в режиме «Выставка».
Вычислительное устройство СВ работает в двух режимах: I – «Выставка», II – «Навигация и контроль». По результатам математического моделирования выбран тип решающего блока и его параметры. Решающие блоки реализуют операции: цифровое интегрирование по формуле прямоугольников, суммирование приращений с полноразрядными числами, преобразование числа в поток приращений, операцию ограничения, операцию образования знаковой функции. Принципиальные схемы решающих блоков выполнены на комплекте БИС трех типов: последовательном регистре (К502, ИР1), сумматоре приращений (К502, ИС1) и масштабном интеграторе (К502, ИПТ) [2,85,98].
Вычислительное
устройство СВ «Вычислитель-1» содержит
следующие блоки: блок расчета начальных
условий bij
по
введенным величинам (60 УРБ); блок режима
I
(60 УРБ); блок вычисления начальных
значений
![]() (14
УРБ); блок режима II
(138 УРБ); блок выработки команд управления
(22 УРБ). Общее число УРБ, определенное
по результатам моделирования полной
задачи, в схемах решающей части СВ
составляет 253.
(14
УРБ); блок режима II
(138 УРБ); блок выработки команд управления
(22 УРБ). Общее число УРБ, определенное
по результатам моделирования полной
задачи, в схемах решающей части СВ
составляет 253.
Для проверки правильности функционирования СВ во всех режимах, а также его отладки разработан контрольно-испытательный стенд КИС-1, который занимает верхнюю часть общей конструкции СВ.
Для организации управления вычислительными процессами в комплексе служит мониторная система, реализованная с помощью операционной системы (ОС) ЭВМ. Задачи мониторной системы – организация различных режимов работы комплекса для исследования ошибок ИНС, моделирования идеального движения и исследования идеальной модели ИНС, а также для синхронизации вычислительных процессов в комплексе. В состав мониторной системы входят планировщик работ и системная библиотека МВК, включающая модуль монитора, программу обмена, программу анализа результатов и библиотеку исследуемых программных модулей СВ ИНС. Мониторная система является частью программного обеспечения комплекса. Программное обеспечение МВК в общем случае включает программные средства управляющей ЭВМ (ОС), программные средства ИВС и различные пульты управления (ПУ) комплексом, которые являются аппаратными расширителями мониторной системы. Структура ПО МВК показана на рис. 9.5.
По своему функциональному назначению модули ПО подразделяются следующим образом. Модули МО ИВС предназначены для трансляции, загрузки и управления системными работами при подготовке необходимой задачи к решению на ИВС. Группа системных программ ИВС организует конкретную версию ПО ИВС и настраивает обрабатывающие программы (кросс-компилятор, загрузчик, диспетчер) на работу с определенным классом задач.
■
Рис. 9.5. Структура программного обеспечения МВК
Функции модулей мониторной системы следующие:
анализ задания на работу МВК и выбор необходимого режима работы моделирующего комплекса и необходимых программных средств из системной библиотеки (планировщик работ);
управление вычислительным процессом и процессами обмена и синхронизации для заданного режима работы (монитор);
формирование необходимых программных драйверов, осуществляющих обмен в комплексе между объектом исследования и исследующей частью (модули обмена);
обработка прерываний и работы с ПУ ИНС и ПУ МВК (монитор).
Особенностью реализации мониторной системы в режимах ОС ЭВМ является ее двухуровневая иерархическая структура: первый, высший, уровень управления реализуется на языке программирования ФОРТРАН; второй, низший, уровень – на ассемблере (микроассемблере либо автокоде). Это обусловлено тем, что формирование задания на моделирование или исследование ИНС пользователю удобнее провести на ЯП высокого уровня. Кроме того, на таком уровне легче реализовать модели планировщика и монитор, используя средства ОС ЭВМ. Модули обмена в МВК требуют для своей эффективной организации программных средств, позволяющих непосредственно работать с аппаратурой управляющей ЭВМ (магистраль, ОЗУ и т. д.). Следовательно, модули драйверов, обработки прерываний и работы с ПУ необходимо выполнить на ассемблере управляющей ЭВМ. После обработки задания на исследование ИНС мониторной системой транслятор генерирует в рамках ОС ЭВМ эффективный объектный модуль рабочей программы, распределяемой по вычислительным средствам МВК: управляющая программа, драйверы и программы анализа результатов - в управляющую ЭВМ, программы СВ ИНС - в вычислитель ИНС, модели ИД, ГУ, преобразователей - в ИВС.
Объектный модуль для ИВС получится после прохождения через кросскомпилятор и загрузчик ИВС под управлением диспетчера ИВС. Он формируется из библиотеки программ СВ ИНС путем добавления модуля нестандартного обмена, написанного на ассемблере ЭВМ и служащего для вывода в магистраль результатов моделирования для программ анализа. С помощью системной библиотеки сформируется рабочая версия монитора для заданного режима работы МВК, состоящая из модуля управления, общей базы данных, драйверов и модуля анализа результатов. Исходные данные для ИВС, СВ и управляющей ЭВМ поступают из задания на исследование ИНС. Логическая схема взаимодействия системных программ МВК изображена на рис. 9.6.

Рис. 9.6. Взаимодействие программ системы программного обеспечения МВК
Отметим важность вопросов синхронизации вычислительных процессов в комплексе при различных режимах работы. При моделировании ИНС получается незамкнутый контур управления, если ИНС представлена реальной аппаратурой, или замкнутый контур управления, если моделируется ИД с гироустройством. Поскольку работа МВК основана на асинхронном принципе при обмене данными (ввиду разницы в быстродействии вычислительных устройств комплекса), предлагается вычисления синхронизировать во времени программным способом посредством передачи в блоки связи комплекса специальных команд опроса готовности блоков. При незамкнутом контуре управления основная программа в ИВС согласована по числу точек решения с навигационными программами СВ ИНС во временной области, и синхронизация производится по готовности блоков связи МВК. При замкнутом контуре управления запуск программы для вычисления следующей точки в ИВС (модель ИД) и программы в управляющей ЭВМ (модель ГУ) производится монитором, который, анализируя определенные фиксированные ячейки памяти ЭВМ, выдает команду на запуск программы при смене информации в этих ячейках.
Во всех программных драйверах предусматриваются также команды опроса готовности блоков связи. В случае нарушения готовности выдается сигнал прерывания в виде PSW на ПУ МВК. Основная программа, просчитав очередную точку, зависает на конструкции типа:
if z = 0 then goto L1 else goto L3; L1: goto L2,
где
L2
помечает оператор присваивания некоторой
переменной Z
числовой информации
![]() ,
которая получается при решении в основной
программе:L2:
z :=
,
которая получается при решении в основной
программе:L2:
z :=
![]() переход в меткуL3
(начало основной программы) осуществляется
в случае появления новой информации
(
переход в меткуL3
(начало основной программы) осуществляется
в случае появления новой информации
(![]() )
в ячейкеz.
)
в ячейкеz.
Таким
образом, при имитации реального движения
после просчета очередной точки основная
программа в ЭВМ (модель ГУ) выдает данные
в СВ ИНС, откуда затем
получает управляющее воздействие на
ГУ в виде вектора
![]() .
В момент выдачи данных в СВ основная
программа в ЭВМ, а соответственно и в
ИВС, зависает на командах анализа ячеек,
принимающих новое значение управляющего
воздействия
.
В момент выдачи данных в СВ основная
программа в ЭВМ, а соответственно и в
ИВС, зависает на командах анализа ячеек,
принимающих новое значение управляющего
воздействия
![]() ,
и после выдачи условияz
0 переходит в активный режим для вычисления
новой точки при условии, что не нарушалась
синхронизация при передачи через блоки
связи МВК.
,
и после выдачи условияz
0 переходит в активный режим для вычисления
новой точки при условии, что не нарушалась
синхронизация при передачи через блоки
связи МВК.
Реализация программных средств МВК в виде кросс-системы на ЭВМ с использованием развитой операционной системы и распараллеливание вычислений с помощью многопроцессорной структуры комплекса позволяют решать основные вопросы для организации исследования ИНС в реальном масштабе времени с меньшими затратами, чем при использовании мощных ЭВМ старших моделей с реализацией ПО МВК на уровне машинного языка или автокода.
При разработке управляющих и моделирующих вычислительных комплексов первостепенным является вопрос о правильном выборе вычислительных средств комплекса, поскольку такие комплексы, как правило, используются для проектирования и исследования сложных динамических объектов в реальном масштабе времени и стоимость их аппаратно-программных средств может достигать значительных величин. Моделирующий вычислительный комплекс, как отмечено выше, для объектов, поведение которых описывается системами обычных дифференциальных уравнений и набором логических условий, обычно состоит из трех типовых частей: ЭВМ, которая играет роль управляющего органа системы, интегрирующей вычислительной структуры, которая решает основной объем вычислительных задач, и объекта моделирования (ОМ), связанного с ЭВМ через каналы связи.
Для работы с ОМ можно подобрать соответствующую по своим техническим характеристикам мощную ЭВМ общего назначения, что в большинстве случаев является дорогим и неоправданным решением. При использовании МВК для исследования объекта ставится цель достичь снижения стоимости разработки МВК путем применения в комплексе ЭВМ нужной мощности.
Если
рассмотреть структуру МВК не в плане
иерархии моделирования, а в плане
иерархии объема вычислений, производящихся
в ЭВМ и ИВС, то можно заметить,
что в большинстве случаев на верхнем
уровне окажется ИВС, на нижнем - ЭВМ с
ОМ. Это объясняется тем, что для выработки
объема управляющей
информации![]() ЭВМ
должна выполнить по сравнению с ИВСчисло
шагов на порядок или на несколько
порядков меньше. Сигналы обратной связи
также несут небольшой объем информации
ЭВМ
должна выполнить по сравнению с ИВСчисло
шагов на порядок или на несколько
порядков меньше. Сигналы обратной связи
также несут небольшой объем информации![]() по
сравнению синформацией,
выдаваемой в нижний уровень ИВС.
Приведенные рассуждения позволяют
рассматривать ИВС в такой иерархии, как
управляющий орган для своего
объекта моделирования ЭВМ-ОМ (рис. 9.7).
Поэтому
говорить о производительности
МВК в обычном смысле (как составленной
из производительностей ЭВМ и ИВС) не
совсем правильно.
по
сравнению синформацией,
выдаваемой в нижний уровень ИВС.
Приведенные рассуждения позволяют
рассматривать ИВС в такой иерархии, как
управляющий орган для своего
объекта моделирования ЭВМ-ОМ (рис. 9.7).
Поэтому
говорить о производительности
МВК в обычном смысле (как составленной
из производительностей ЭВМ и ИВС) не
совсем правильно.

Рис. 9.7 Преобразованная структура моделирующего вычислительного комплекса
В
таком МВК производительность не должна
определяться как производительность
ИВС, т.е.
![]() ,
и как
,
и как
производительность
ЭВМ, т.е.
![]() ,
а должна быть величиной, связанной с
объемами передаваемой информации по
каналам комплекса, временем обращения
к каналам, быстродействием процессоров
ИВС и
ЭВМ. Существенную роль здесь играет
параллельность ИВС, которая связана с
числом
его выходных процессоров, подсоединенных
к его выходным каналам.
,
а должна быть величиной, связанной с
объемами передаваемой информации по
каналам комплекса, временем обращения
к каналам, быстродействием процессоров
ИВС и
ЭВМ. Существенную роль здесь играет
параллельность ИВС, которая связана с
числом
его выходных процессоров, подсоединенных
к его выходным каналам.
Для определения производительности Р ЭВМ, а также ИВС воспользуемся следующей формулой [25, 36, 48]:
![]() (9.3)
(9.3)
где tЦ – цикл процессора;
tВ.B – среднее время ввода-вывода данных на одну команду процессора;
- постоянный коэффициент;
![]() , (9.4)
, (9.4)
где
![]() -
среднее количество данных на одну
команду процессора, передаваемых
по селекторному или мультиплексорному
каналу, в байтах; n
иm
-
число периферийных устройств, подключаемых
к каналам; рj
и
рк
-вероятности
обращения к i-му
или k-му
периферийному устройствам, причем
-
среднее количество данных на одну
команду процессора, передаваемых
по селекторному или мультиплексорному
каналу, в байтах; n
иm
-
число периферийных устройств, подключаемых
к каналам; рj
и
рк
-вероятности
обращения к i-му
или k-му
периферийному устройствам, причем
![]() -
среднее количество данных, передаваемых
за одно обращение
к периферийному устройству, в байтах;
-
среднее количество данных, передаваемых
за одно обращение
к периферийному устройству, в байтах;
![]() -
среднее время обращения
к i-му
или k-му
периферийным устройствам.
-
среднее время обращения
к i-му
или k-му
периферийным устройствам.
Согласно
установившимся рекомендациям, объем
ввода-вывода по селекторному
каналу следует принимать намного больше,
чем по мультиплексному.
Следовательно, в выражении (9.5)
второй
член можно не
учитывать.
Тогда
 ,
где
,
где
![]() = 0,04
байта на команду (согласно ГОСТ 16325-76).
= 0,04
байта на команду (согласно ГОСТ 16325-76).
Цикл ЭВМ определяется по паспортным данным, а цикл параллельной ИВС как
![]() (9.5)
(9.5)
где k – разрядность обрабатываемых слов;
fT – тактовая частота работы ИВС;
N – число специализированных процессоров ИВС.
Таким образом определяется производительность вычислительных устройств МВК в отдельности без учета их совместной работы по одной программе в комплексе.
Для определения производительности комплекса можно воспользоваться формулой для мультипрограммной работы ЭВМ, считая, что МВК вместо решения одной задачи на (N+1) процессорах (1 процессор ЭВМ, N процессоров ИВС) путем ее разделения на части между ЭВМ и ИВС решает число задач M < N +1 на одном процессоре с некоторой эквивалентной производительностью Рм.
Тогда производительность МВК запишется в виде системы
![]() ;
;
 ; (9.6)
; (9.6)
![]() ,
,
где
l
–
уровень мультипрограммирования, при
этом
![]() ,
,
- постоянный коэффициент.
Для
исследования зависимостей
![]() при
tЦ
= const
и
при
tЦ
= const
и
![]() при
при
![]() необходимо
установить влияние функций
и
на
производительность
PЦ.
Функция
необходимо
установить влияние функций
и
на
производительность
PЦ.
Функция
![]() при
убывании времени ввода-вывода tBB
на
типовом интервале от 10+3
до 10–3
мкс по закону
при
убывании времени ввода-вывода tBB
на
типовом интервале от 10+3
до 10–3
мкс по закону
![]() растет
как
растет
как
![]() .
.
Функция
 стремится
к единице, поскольку второй член
достаточно
быстро стремится к нулю. Следовательно,
функция
стремится
к единице, поскольку второй член
достаточно
быстро стремится к нулю. Следовательно,
функция
![]() при
малых tВВ
слабо
зависит от :
при
малых tВВ
слабо
зависит от :![]()
![]() ПриtBB,
стремящихся
к области больших значений (tвв
>
103
мкс), производительность убывает. При
tBB
0 PM
= const
,
при tBB
PM
= 0. Физически это можно объяснить тем,
что при больших tBB
процессоры МВК простаивают значительное
время ввиду постоянной
занятости каналов. Вид зависимости
ПриtBB,
стремящихся
к области больших значений (tвв
>
103
мкс), производительность убывает. При
tBB
0 PM
= const
,
при tBB
PM
= 0. Физически это можно объяснить тем,
что при больших tBB
процессоры МВК простаивают значительное
время ввиду постоянной
занятости каналов. Вид зависимости
![]() приведен
на рис. 9.8,
а.
приведен
на рис. 9.8,
а.
Функция
![]() при
tВВ
= const
и
аналогичном законе изменения
при
tВВ
= const
и
аналогичном законе изменения
![]() на
интервале
на
интервале
![]() возрастает
как
возрастает
как
![]() .
Функция
стремится к единице, поскольку ее второй
член при росте
.
Функция
стремится к единице, поскольку ее второй
член при росте
![]() быстро
стремится к
нулю. Следовательно, функция
быстро
стремится к
нулю. Следовательно, функция
![]() при
малых tц
резко
растет и достигает максимального
значения Ртах
при
при
малых tц
резко
растет и достигает максимального
значения Ртах
при
![]() причем
определяется как минимальное физически
реализуемое время цикла процессора.
При tц
0 функция
причем
определяется как минимальное физически
реализуемое время цикла процессора.
При tц
0 функция
![]() .
Вид зависимости
.
Вид зависимости
![]() приведен
на рис. 9.8, б, кривая 1.
приведен
на рис. 9.8, б, кривая 1.
Полученная
таким образом производительность МВК
будет, очевидно, теоретически достижимой,
так как основной вклад в производительность
комплекса вносится параллельной ИВС.
Учитывая, что, во-первых, в реальных
условиях
работы МВК
![]() (т. е.
0 ввиду
конкуренции при обращении к каналам
памяти, наличия очередей и задержек) и
функции
и
влияют на производительность; во-вторых,
на ИВС решается, как правило, не N,
а
одна задача, т.е. исходная задача
разделяется на две части, которые
эффективно решаются
точечными методами на ЭВМ и непрерывными
методами на ИВС, реально достижимая
производительность МВК будет меньше
Pmax
(рис. 9.8, б, кривая 2).
(т. е.
0 ввиду
конкуренции при обращении к каналам
памяти, наличия очередей и задержек) и
функции
и
влияют на производительность; во-вторых,
на ИВС решается, как правило, не N,
а
одна задача, т.е. исходная задача
разделяется на две части, которые
эффективно решаются
точечными методами на ЭВМ и непрерывными
методами на ИВС, реально достижимая
производительность МВК будет меньше
Pmax
(рис. 9.8, б, кривая 2).
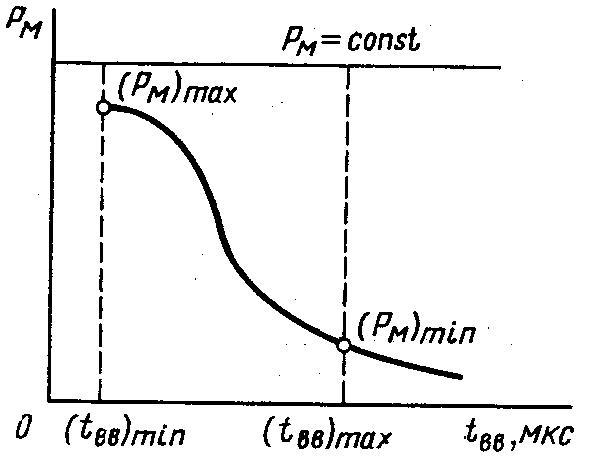

Рис. 9.8. Вид Зависимостей Рм(tВВ) (а) и Рм(tЦ) (б).
Кроме
того, учитывая, что из ИВС информация
на объект моделирования выводится не
из всех процессоров, а по фиксированному
числу каналов из z
процессоров,
где z«N,
получается,
что производительность МВК уменьшается
в z
раз,
т.е.
![]() где
-коэффициент
снижения производительности (рис. 9.8,б,
кривая
3). С увеличением
где
-коэффициент
снижения производительности (рис. 9.8,б,
кривая
3). С увеличением
![]() снижается
и в пределе достигает
снижается
и в пределе достигает ![]() ,
что обусловлено затратами на передачу
значительного объема информации
(практически из всех N
процессоров).
,
что обусловлено затратами на передачу
значительного объема информации
(практически из всех N
процессоров).
С
уменьшением числа входных каналов
(процессоров) производительность
достигает
своего максимума ![]() при
z
= 1.
при
z
= 1.
Для иллюстрации использования данной методики приведем пример расчета производительности МВК на основе ЭВМ II поколения и параллельной ИВС с N=100.
Общепринятая формула Гибсона для определения производительности ЭВМ в классе научно-технических задач имеет вид
 ,(9.7)
,(9.7)
где
i
-
вес i-й
операции
в общем спектре операций ЭВМ, определяющий
частоту ее использования в
программах;
ti
- время
выполнения i-й
операции. Приведенная формула (9.7)
для
ЭВМ дает производительность
![]() 105
оп/сек. Если учесть, что специализированный
процессор ИВС выполняет пять основных
операций (интегрирование, суммирование,
квантование, экстраполяцию и логические
операции) за одно и то же время,
то
для ИВС данная формула преобразуется
к виду
105
оп/сек. Если учесть, что специализированный
процессор ИВС выполняет пять основных
операций (интегрирование, суммирование,
квантование, экстраполяцию и логические
операции) за одно и то же время,
то
для ИВС данная формула преобразуется
к виду
![]() .Схема
Гибсона для параллельной ИВС
трансформируется к виду
.Схема
Гибсона для параллельной ИВС
трансформируется к виду
![]() (9.8)
(9.8)
откуда
![]() оп/с
для k
= 30, fT
= 106
Гц.
оп/с
для k
= 30, fT
= 106
Гц.
Расчет
производительности по предлагаемой
методике дает следующие результаты.
Производительность ИВС рассчитывается
по формуле (9.8): PИBC![]() оп/с
при tЦ=
0,4 мкс;
= 0,12; tee=0,01
мкс.
Оценка производительности ЭВМ
дает
результат
оп/с
при tЦ=
0,4 мкс;
= 0,12; tee=0,01
мкс.
Оценка производительности ЭВМ
дает
результат
![]() оп/с.
оп/с.
Производительность
МВК при
= 33,6;
= 0,9992 равна ![]() оп/с.
оп/с.
Эффективная
производительность комплекса (при
= 0; z
= 15) равна ![]() оп/с.
оп/с.
Таким
образом, производительность комплекса,
рассчитанная по предложенной методике,
дает более точный результат, чем по
формуле Гибсона, если определение
производительности по Гибсону производится
по формуле ![]() оп/с,
где п
– число
процессоров МВК. Рассчитанная по
предложенной методике производительность
отражает реальную вычислительную
мощность комплекса, так
как
оп/с,
где п
– число
процессоров МВК. Рассчитанная по
предложенной методике производительность
отражает реальную вычислительную
мощность комплекса, так
как
![]() оп/с
и в
оп/с
и в
![]() учитывается
влияние каналов передачи данных, число
периферийных устройств ЭВМ и объем
передаваемой информации, а также
число выходных каналов (процессоров)
интегрирующей вычислительной структуры.
учитывается
влияние каналов передачи данных, число
периферийных устройств ЭВМ и объем
передаваемой информации, а также
число выходных каналов (процессоров)
интегрирующей вычислительной структуры.