

5.5.Проектирование решающей части интегрирующих вычислительных структур
В соответствии со структурно-логической схемой проектирования ИВС (рис. 4.2), параллельно с разработкой математической модели структуры, должен проводиться синтез функциональных модулей (специализированных микропроцессоров), составляющих основу построения интегрирующих вычислительных структур.
В данном разделе остановимся на методике автоматизированного проектирования решающей части интегрирующей вычислительной структуры [27, 36].
Одной из наиболее сложных задач, возникающих при проектировании интегрирующих вычислительных структур, является задача выбора параметров ИВС по заданным критериям.
К числу этих критериев следует отнести быстродействие и точность вычислений за определенный интервал решения. Естественно, что точность является самым важным критерием при проектировании ИВС, определяя её пригодность. Что касается критерия быстродействия ИВС, то он определяет возможность её применения при решении задач в реальном масштабе времени, в частности, в системах управления динамическими объектами [23, 43, 49].
Цифровые интегрирующие структуры могут обладать высокой точностью и быстродействием за счет возможности применения в них точных формул интегрирования, использования многоразрядных приращений и параллельности структуры [36, 76, 104].
В настоящее время имеется ряд работ [27, 36], посвященных исследованию отдельных вопросов, составляющих задачу выбора параметров как ЦИМ в целом, так и ее основных устройств.
Из анализа рассмотренных методов выбора параметров ЦИМ можно заключить, что одна из наиболее сложных задач, возникающих при проектировании ЦИМ, - задача выбора параметров ЦИМ по заданным критериям качества - в настоящее время решена частично, то есть решена относительно некоторых параметров, причем для конструирования цифровых интегрирующих машин, предназначенных для реализации конкретных функций.
Часто
при проектировании ИВС в качестве
исходных данных для её решающей части
задаются: время решения Τ,
допустимая
погрешность
![]() и
полоса пропускания
и
полоса пропускания
![]() .
Эти требования определяют точностные
и частотные характеристики структуры
и влияют на параметры её
решающих
блоков. В связи с этим предлагается
методика расчета параметров УРБ,
работающих с фиксированной запятой, в
зависимости от заданных
.
Эти требования определяют точностные
и частотные характеристики структуры
и влияют на параметры её
решающих
блоков. В связи с этим предлагается
методика расчета параметров УРБ,
работающих с фиксированной запятой, в
зависимости от заданных
![]() .
Расчет параметров решающего блока ИВС
производится путем анализа погрешностей,
возникающих в нем при решении той или
иной задачи. При расчете учитываются
погрешности метода интегрирования,
экстраполяции, квантования и общая
погрешность УРБ на шаге решения.
.
Расчет параметров решающего блока ИВС
производится путем анализа погрешностей,
возникающих в нем при решении той или
иной задачи. При расчете учитываются
погрешности метода интегрирования,
экстраполяции, квантования и общая
погрешность УРБ на шаге решения.
Предполагается, что проектируемая ИВС должна обеспечить заданную точность вычислений и быстродействие при решении любой из стандартных функций. В данном случае делается попытка получить систему соотношений для выбора параметров ИВС, предназначенной для решения круга задач, в основу которой положен универсальный решающий блок, выполнявший операции суммирования приращений, интегрирования, а также логических операций. Структура такого блока показана на рис. 5.17, а взаимодействие S -регистра и Y-регистра приведено на рис. 5.18. К параметрам данного блока относится: метод интегрирования, порядок экстраполяции, а также: .
-
количество разрядов Y-регистра
-![]() ;
;
-
количество разрядов приращений интеграла
-![]() ;
;

Рис. 5.17 Структура УРБ для расчёта его параметров

Рис. 5.18 Взаимодействие S-регистρа и Y-регистра УРБ

Рис. 5.19 Включение ИВС в замкнутый контур управления
-
количество разрядов приращения интеграла
после экстраполяции
![]() ,
определяющих длину S-регистра;
,
определяющих длину S-регистра;
-
количество
разрядов квантованного приращения -
![]() ;
;
шаг интегрирования по независимой переменной -
 ;
;тактовая частота элементной базы -
 .
.
Выбор
параметров осуществляется для параллельной
структуры ИВС при условии, что решающая
часть должна выполнять операции с
точностью вычислений –
![]() ,
за интервал времениΤ
и
иметь при этом полосу пропускания
,
за интервал времениΤ
и
иметь при этом полосу пропускания
![]() (под
(под
![]() понимается
относительная погрешность вычисления).
Анализ погрешностей, возникающих в УРБ,
а также анализ взаимного влияния
параметров друг на друга позволяет
найти соотношения для выбора параметров
решающей части ИВС, которые можно
представить в виде следующей системы:
понимается
относительная погрешность вычисления).
Анализ погрешностей, возникающих в УРБ,
а также анализ взаимного влияния
параметров друг на друга позволяет
найти соотношения для выбора параметров
решающей части ИВС, которые можно
представить в виде следующей системы:
(5.37)
где
![]() –
количество тактов, затрачиваемых на
один шаг решения (итерацию);
– время выполнения одной итерации;
–
количество тактов, затрачиваемых на
один шаг решения (итерацию);
– время выполнения одной итерации;
U
–
коэффициент в формуле погрешности;
![]() –
погрешность метода интегрирования; k
– порядок экстраполяции.
–
погрешность метода интегрирования; k
– порядок экстраполяции.
Полученная система уравнений может быть разрешена при первоначальном выборе метода интегрирования. Поэтому, задавая метод интегрирования, начиная с более простого, можно просмотреть различные варианты параметров ИВС и выбрать наиболее желательный по тому или иному параметру, например, по величине тактовой частоты, или по расходу оборудования.
Для
УРБ, оперирующих с одноразрядными
приращениями, система (5.37) упростится
с учётом того, что в этом случае
используется метод интегрирования по
формуле прямоугольников, экстраполяция
приращений отсутствует, приращения на
выходе УРБ определяются разрядом
переполнения S
-регистра,
т.е.
![]() =
0.
=
0.
С учетом перечисленных упрощений система соотношений для выбора параметров УРБ с одноразрядными приращениями имеет следующий вид:
(5.38)
Шаг
интегрирования в этом случае
![]() так
как приращения одноразрядные, а
так
как приращения одноразрядные, а
![]() .
.
С учетом этих соотношений систему (5.38) можно свести к двум неравенствам:
(5.39)
Пользуясь соотношениями (5.39), можно построить семейство неравенств, дающих область определения параметров ny и fm на основании требований технического задания к точности, быстродействию и времени решения. По этим параметра, в соответствии с системой (5.38), могут быть определены все остальные параметра УРБ ИВС.
При
работе ИВС в замкнутом контуре системы
управления динамическими объектами
(рис. 5.19) исходными
данными
для расчета параметров решающих блоков
являются: допустимая погрешность
![]() на
интервале решения Τ,
частота ввода исходных данных в ИВС –
fв
и
количество разрядов входного приращения
–
nв.
Правильно выбранные параметры
на
интервале решения Τ,
частота ввода исходных данных в ИВС –
fв
и
количество разрядов входного приращения
–
nв.
Правильно выбранные параметры
![]() должны
обеспечить работу ИВС с требуемыми
точностью и быстродействием на заданном
интервале времени решения задач.
должны
обеспечить работу ИВС с требуемыми
точностью и быстродействием на заданном
интервале времени решения задач.
Информация
о внешних воздействиях
![]() ,
влияющих
на работу объекта управления (ОУ), и
информация о состоянии самого объекта
управления
,
влияющих
на работу объекта управления (ОУ), и
информация о состоянии самого объекта
управления
![]() поступает
во входное устройство (BУ)
ИВС, где она разворачивается в поток
приращений и передается для обработки
в вычислительное устройство управляющей
ИВС (рис. 5.19).
поступает
во входное устройство (BУ)
ИВС, где она разворачивается в поток
приращений и передается для обработки
в вычислительное устройство управляющей
ИВС (рис. 5.19).
Если
ИВС работает с одноразрядными приращениями,
то для того, чтобы развернуть nв-разрядную
входную величину в поток приращений,
необходимо выполнить
![]() итераций.
При работе с многоразрядными приращениями
целесообразно принимать
итераций.
При работе с многоразрядными приращениями
целесообразно принимать![]() и
тогда Q
= 1.
и
тогда Q
= 1.
Система уравнений для расчета решающей части ИВС, работающей в замкнутом контуре управления, имеет следующий вид:

(5.40)
Следует отметить, что рассмотренная методика расчета параметров решающих блоков ИВС дает оценку для худшего случая с точки зрения накопления погрешности в решающих блоках, когда в них вычисляются непрерывные монотонные функции.
Для проведения расчета и выбора параметров решающей части ИВС с использованием ЦВМ разработана программа расчета, составленная на алгоритмическом языке по алгоритму (5.39).
Структурная схема автоматизированной системы проектирования ИВС (рис. 5.20) состоит из трех частей: программы расчета параметров (ПРП), универсальной математической модели ИВС (УММ) и управляющей программы (УП)·
Автоматизированная система проектирования, алгоритм работы которой представлен на рис. 5.21, работает следующим образом. Управляющая программа, являющаяся программой, координирующей работу автоматизированной системы проектирования в целом, вызывает в ОЗУ программу расчета параметров. В зависимости от заданной точности вычислений, полосы пропускания и интервала решения программа расчета параметров выбирает метод численного интегрирования и порядок экстраполяции, проводит расчет длин разрядных сеток (Πу, ΠS) регистров RGY
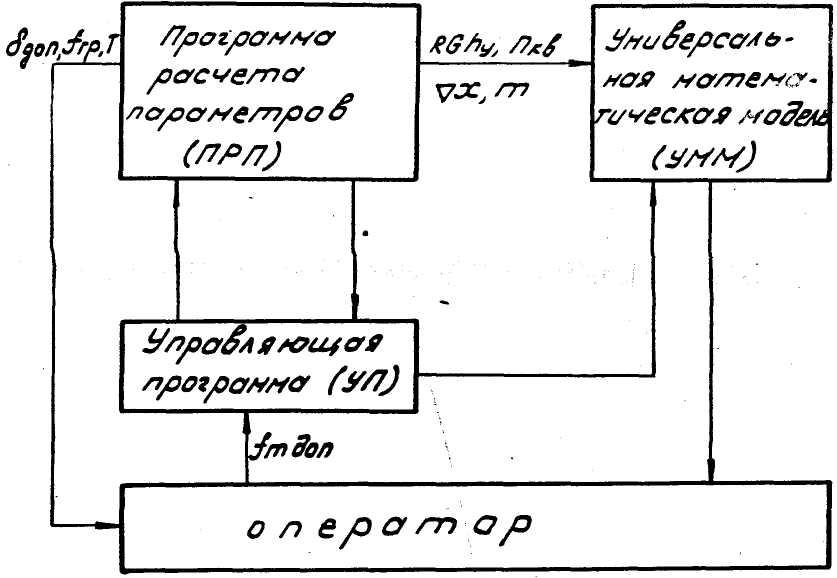
Рис. 5.20 Структурная схема автоматизированной системы проектирования ИВС
и RGS,
количество разрядов квантованного
приращения (nкв),
величину машинной переменной
![]() и
тактовую частоту работы проектируемой
ИВС (fm).
и
тактовую частоту работы проектируемой
ИВС (fm).
Затем
управление АСП вновь передается
управляющей программе. В УП происходит
анализ рассчитанных в ПРП параметров
тактовой частоты и сравнение её с
допустимой тактовой частотой
![]() .
Если рассчитанная тактовая частота
.
Если рассчитанная тактовая частота![]() ,
то управление автоматизированной
системой проектирования передается
опять в ПРП, где заново, но уже для другого
метода интегрирования производится
расчет параметров. В случае выполнения
условий
,
то управление автоматизированной
системой проектирования передается
опять в ПРП, где заново, но уже для другого
метода интегрирования производится
расчет параметров. В случае выполнения
условий![]() и
и
![]() управляющая
программа считывает программу
универсальной математической модели
и передает ей управление АСП, при этом
параметры универсального решающего
блока ИВС, рассчитанные ПРП, вводятся
в соответствующие ячейки памяти УММ.
После ввода параметров УРБ и исходных
данных УММ производит моделирование
задачи в соответствии с требованиями,
предъявляемыми к проектируемой ИВС по
точности и быстродействию.
управляющая
программа считывает программу
универсальной математической модели
и передает ей управление АСП, при этом
параметры универсального решающего
блока ИВС, рассчитанные ПРП, вводятся
в соответствующие ячейки памяти УММ.
После ввода параметров УРБ и исходных
данных УММ производит моделирование
задачи в соответствии с требованиями,
предъявляемыми к проектируемой ИВС по
точности и быстродействию.

Рис. 5.21 Алгоритм рaбoты АСП
Программа выбора параметров УРБ ИВС реализована на языке BASIS FORTRAN. При этом границы изменения параметров задавались следующим образом:
1)
![]() с
шагом
с
шагом
![]() ;
;
2)
![]() причем
причем
![]() ;
;
3)
![]() с
шагом
с
шагом
![]() ;
;
4)
![]() причем
причем
![]() ;
;
5) с целью отбрасывания практически нереализуемых вариантов по тактовой частоте было введено ограничение Η=5,0МГц.
Блок-схема алгоритма выбора параметров для данного случая представлена на рис. 5.22. Здесь величины i, k, l – параметры циклов.

Рис. 5.22. Граф микропрограммы выбора параметров УРБ
Точка пересечения
(FT)
мин. и (FT)
макс.
Интервалы
отсчёта частот

Рис. 5.23. Определение устойчивой области для параметров УРБ
Алгоритм выбирает только те значения параметров, которые соответствуют физически реализуемым частотам FT H.
Общее число вариантов, просчитываемое ЦВМ в данной программе, V = 32103, причем в среднем из каждых 10 вариантов девять отбрасывалось, один попадал в допустимую область. Время решения при заданных границах изменения параметров составило 10 минут.
Изменяя
величину ограничения H
на
частоту FT,
пределы для
![]() ,
можно получить практически все параметры
для любого решающего блока ИВС.
,
можно получить практически все параметры
для любого решающего блока ИВС.
При
расчете параметров УРБ для любой формулы
численного интегрирования необходимо
следить за появлением точки пересечения
зависимостей (5.39) для FTтах
и
FTmin,
переход через которую приводит в
неустойчивую область параметры УРБ,
где
![]() (рис. 5.23).
(рис. 5.23).