

5.4 Разработка алгоритма универсального решающего блока, основанного на принципе цифрового слежения и синтез его структурной схемы
При решении задач на ИВС используется способ понижения порядка производной (подобие метода явных функций в АВМ) и способ образования обратных связей (метод неявных функций в АВМ) [9, 108, 110]. Метод понижения порядка производной в ИВС, так же как и метод явных функций в АВМ, наиболее простой. Структурная схема, составленная по этому методу, однозначно определяет зависимость выходной величины от входных параметров. Поэтому в этом случае не возникает принципиальных препятствий или каких-либо сложных проблем при наборе и решении задач.
Использование метода образования обратных связей, который, в частности, незаменим при программировании задач, в которых зависимость между выходной и входными величинами выражена в неявном виде, приводит к организации процесса цифрового слежения за величинами. В этом случае встают вопросы, связанные с анализом и синтезом алгоритмов сравнивающих устройств, которые разработаны в меньшей степени, чем другие проблемы ЦИМ.
При использовании метода обратных связей, как правило, возникают дополнительные погрешности, не зависящие от методической погрешности и погрешностей квантования, присущих всем решающим блокам ИВС, и которые в отдельных случаях значительно превосходят последние. В некоторых случаях погрешности слежения искажают результаты решения задач, поэтому не могут быть использованы практически.
Отмеченные факторы могут быть устранены двумя путями: во-первых, можно преобразовать исходную задачу так, чтобы уменьшить или исключить количество следящих устройств, приводящих к большим погрешностям; во-вторых, можно разработать такие сравнивающие устройства, которые бы незначительно уменьшали общую точность решения задачи. Первый путь не всегда возможен или приводит к значительному усложнению преобразованного алгоритма, что в свою очередь сильно усложняет структурную схему решения задачи. Второй путь наиболее предпочтителен, поэтому на основе принципа цифрового слежения синтезированы алгоритмы работы простых, работающих с высокой точностью устройств сравнения, на основе которых построены УРБ, позволяющие решать задачи способом образования обратных связей с высокой степенью точности [13, 14, 15 ,36, 76, 78, 79, 80].
Принцип слежения в общем виде заключается в том, что по мере изменения некоторой заранее неизвестной функции yр(х) необходимо выработать функцию Z(x), которая с заданной степенью точности должна повторять функцию yр(х), то есть следить за последней. Удовлетворительным процесс слежения будет, если на всем интервале изменения независимой переменной выполняется неравенство
![]() (5.25)
(5.25)
Исходя из соотношения (5.25), можно предъявить следующие требования к функциям ур(x) и Z(x): функция Z(x) должна быть такой, что если разность (5.25) превышает заданное , то она при возрастании x с максимальной скоростью увеличивалась, стремясь к функции yр(х). Так как в ИВС скорость изменения переменных ограничена отношением максимального приращения функции к величине шага вычислений, то на скорость изменения искомой функции yp(x) также необходимо наложить определенные ограничения.
Например, при использовании одноразрядных приращений для удовлетворения (5.25) на определенном интервале изменения х необходимо выполнить условия (5.26):
(5.26)
где Z и x – кванты соответствующих функций.
При синтезе алгоритмов цифрового слежения и построении УРБ на их основе предполагается, что описанный процесс цифрового слежения эффективно реализуется, если в основу слежения положено интегральное уравнение [13, 76, 78, 79]:
(5.27)
.
Сравнивающее устройство, построенное на основе интегрального уравнения (5.27), будет представлять собой апериодическое звено, которое не даст перерегулирования, но процесс отработки истинного значения функции будет происходить медленно.
Для
устранения этого недостатка необходимо
в интегральном уравнении (5.27),
связывающем вычисленное значение
функции z(x)
с
ее истинным выражением yр(x)
,
учитывать предыдущее значение функции
z(x).
Причем,
если разница между z(x)
и
yp(x)
на
данном i-м
интервале равна нулю, то функция z(x)
должна
уменьшаться или
увеличиваться в зависимости от знака
ее предыдущего значения
![]() Поэтому в
интегральное уравнение необходимо
добавить значение производной функции
z(x)
со своим
знаком. Тогда интегральное уравнение
(5.27) примет следующий вид:
Поэтому в
интегральное уравнение необходимо
добавить значение производной функции
z(x)
со своим
знаком. Тогда интегральное уравнение
(5.27) примет следующий вид:
(5.28)
,
которое практически использовано.
Приближенное решение интегрального уравнения (5.28) позволяет получить алгоритм слежения в следующем виде (на примере операции дифференцирования) [80]:
(5.29)![]()
Иногда
применяется уточненный алгоритм
слежения, в котором берутся
проэкстраполированные приращения
![]() и
и
![]() :
:
(5.30)![]()
Для одноразрядных приращений алгоритм слежения (5.30) преобразуется к следующему виду:
(5.31)
Преобразуя алгоритм (5.31) к виду
(5.32)![]()
строятся
индикаторы равенства многоразрядных
приращений, которые в каждом шаге
сравнения определяют разность
![]() ,
производят суммирование получающейся
разности с предыдущим значением
отрабатываемой переменной и определяют
знаковые функции от этих аргументов
[14, 76].
,
производят суммирование получающейся
разности с предыдущим значением
отрабатываемой переменной и определяют
знаковые функции от этих аргументов
[14, 76].
Используя
понятие о потоках единичных приращений
![]()
![]() ,
,
![]() ,
представим алгоритм слежения за потоками
приращений
,
представим алгоритм слежения за потоками
приращений
![]()
и
(5.33)
Исходя из выражения (5.33), построим схему ИР на основе структурной схемы, представленной на рис. 5.5, состоящей из двух каскадов.
Функциональная схема ИР приведена на рис. 5.6. Работа схемы ИР синхронизируется во втором каскаде двумя тактирующими импульсами C1 и С2, сдвинутыми друг относительно друга на время переходных процессов в триггерах Т.
Исходя из общей экстраполяционной разностко-квантованной схемы моделирования уравнений Шеннона (5.1), для синтеза алгоритма УРБ, оперирующего с многоразрядными приращениями и содержащего индикацию равенства приращений, воспользуемся наиболее простой формулой численного интегрирования интеграла Стилтьеса. При использовании многоразрядных приращений необходимо, чтобы порядок формулы приближенного вычисления интеграла Стилтьеса был по крайней мере больше двух - формула трапеций.
Рис. 5.5. Структурная
схема ИР

Рис. 5.6.
Функциональная схема ИР
Используя эту формулу, а также показательный алгоритм квантования, для дополнительных кодов приращений представим алгоритм УРБ в следующем виде:

(5.34)
где

Для ИВС, оперирующей с одноразрядными приращениями, получим аналогичный алгоритм универсального решающего блока:
(5.35)

где - признак операции индикации равенства единичных потоков приращений.
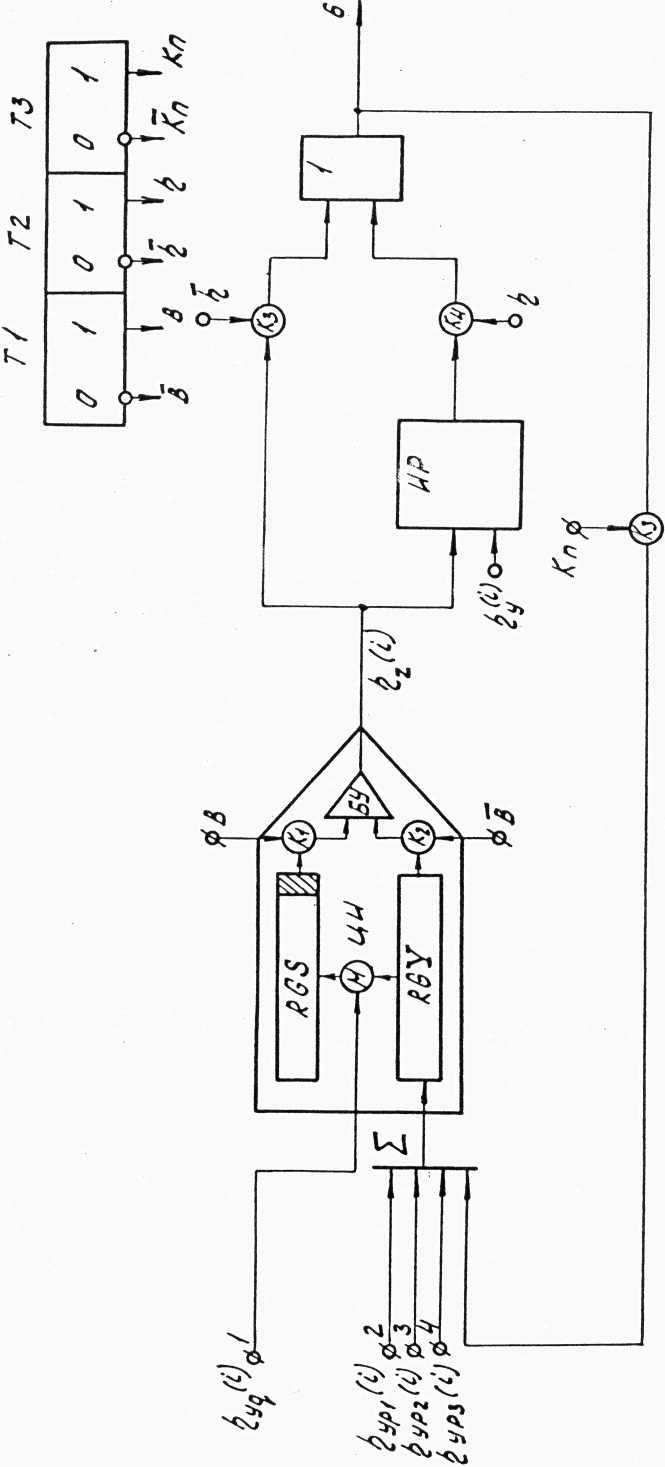
На основе алгоритма (5.35) приведем структурную схему универсального решающего блока, оперирующего с одноразрядными приращениями (рис. 5.7).
Для упрощения принято, что УРБ имеет один вход по переменной интегрирования и три входа по подынтегральной функции.
Этот
УРБ (рис.5.7) кроме операций, перечисленных
для УРБ, может настраиваться на режим
цифрового слежения – индикацию равенства
потоков приращений при реализации
операций. Поэтому выходное устройство
после коммутации сигналами "В"
- цифровое интегрирование или "![]() "
- режим суммирующего интегратора, должно
еще раз управляться сигналами,
разграничивающими отмеченные операции
и операцию индикации равенства потоков
приращений ().
"
- режим суммирующего интегратора, должно
еще раз управляться сигналами,
разграничивающими отмеченные операции
и операцию индикации равенства потоков
приращений ().
В этой схеме можно воспользоваться трехразрядным регистром на статических триггерах для записи в него кодов операций выполняемых УРБ. Если введем обозначения, принятые для сигналов операций и приведенные на рис. 5.7, то для всех режимов работы УРБ, перечисленных для УРБ и операции индикации, можно получить настроечную информацию, которая подается в регистры УРБ при наборе задач в ИВС.
1.
![]() - цифровое интегрирование (ЦИ).
- цифровое интегрирование (ЦИ).
2.
![]() - суммирующий интегратор (СмЦИ).
- суммирующий интегратор (СмЦИ).
3.
![]() - следящий интегратор (СлЦИ).
- следящий интегратор (СлЦИ).
4.
![]() - индикация равенства потоков приращений
без обратной связи в УРБ.
- индикация равенства потоков приращений
без обратной связи в УРБ.
5.
![]() - индикация равенства потоков приращений
с обратной связью в УРБ (операция
дифференцирования).
- индикация равенства потоков приращений
с обратной связью в УРБ (операция
дифференцирования).
На основании рассуждений, проведенных выше, может быть построен универсальный блок ОЦИС с произвольным количеством входов, оперирующей с многоразрядными приращениями, цифровой интегратор которого может быть синтезирован на основе формулы численного интегрирования, использованной, например, в алгоритме (5.34).
Рис. 5.7. Структурная
схема УРБ с ИР
Если в структурную схему, показанную на рис. 5.7, ввести и узлы, реализующие логические операции, то получим универсальный решающий блок структуры (по алгоритму 5.35), способный выполнять все вычислительные и логические операции и содержащий в своем составе индикатор равенства приращений (рис. 5.8).
Рис. 5.8. Структурная
схема УРБ ИВС

С помощью универсального решающего блока, включающего в свой состав индикатор равенства потоков приращений, можно реализовать некоторые математические операции, организация которых обычным методом, например с использованием нуль-органов, встречает значительное затруднения.
В цифровых интегрирующих структурах, состоящих из сумматоров, интеграторов и экстраполяторов приращений, погрешность операции дифференцирования иногда на порядок превышает погрешность операции интегрирования и вычисленные значения производной в этом случае практически не применимы.
Использование индикатора равенства потоков приращений, описанного выше и включённого в состав универсального решающего блока, позволяет выполнять операцию дифференцирования и даже многократного дифференцирования с точностью, приближающейся к точности операции интегрирования.
Используя понятия о потоках единичных приращений, приведённых выше, получим алгоритм операций дифференцирования единичных приращений в следующем виде:
 (5.36)
(5.36)
Нетрудно видеть, что алгоритм дифференцирования (5.36) выполняется с помощью одного универсального решающего блока, настройка которого производится в соответствии со схемой, изображённой на рис. 5.9.

Рис. 5.9 Структурная схема операции дифференцирования
Как видно из рис.
5.9, поток приращений ![]() поступает на вход переменной интегрирования,
а индикатор равенства потоков приращений
сравнивает исходный поток приращений
поступает на вход переменной интегрирования,
а индикатор равенства потоков приращений
сравнивает исходный поток приращений
![]() с потоком приращений
с потоком приращений ![]() ,который поступает
с входа интегратора и вырабатывает
поток приращений
,который поступает
с входа интегратора и вырабатывает
поток приращений ![]() ,изображающий
производную функции Z(x).
Пройдя без изменения сумматор ,
поток приращений
,изображающий
производную функции Z(x).
Пройдя без изменения сумматор ,
поток приращений ![]() накапливается в регистре подынтегральной
функции в виде искомой производной
Z(x).
накапливается в регистре подынтегральной
функции в виде искомой производной
Z(x).
Впервые индикатор равенства потоков приращений применён в универсальных решающих блоках первой в нашей стране настольной цифровой интегрирующей структуре «Квант-1», которая разработана и создана под руководством автора этого исследования Гузика В. Ф. в 1966 году на кафедре вычислительной техники Таганрогского радиотехнического института. Автор этой разработки в 1967 – 1968 демонстрировал ЦИМ «Квант-1» на выставке «Образование в СССР», которая проходила в трёх городах США – Бостон, Баффало и Каламбус. Эта работа получила высокие оценки американских учёных в основном из-за того, что при решении задач на электронных вычислительных машинах для образования обратных связей применялись не нуль-органы, а индикаторы равенства потоков приращений.
На фото 5.1 автор разработки Гузик В. Ф. на ЦИМ «Квант-1» исследует операции, требующие образования обратных связей с использованием индикатора равенства потоков приращений.

Фото 5.1
Приведём некоторые практические результаты проведённых исследований.
Задача:
Продифференцировать функцию
![]() гдеk
– const
= 0,1.
гдеk
– const
= 0,1.
Решение:

Начальные данные
![]()
![]()
На рис. 5.10 приведено
аналитико-графическое решение поставленной
задачи дифференцирования функции
![]() Здесь нуль-орган выполняет операцию по
выработке приращений модуляsin
x.
Здесь нуль-орган выполняет операцию по
выработке приращений модуляsin
x.
![]() ,
если
,
если
![]() ,
и если
,
и если![]() то
то
![]()

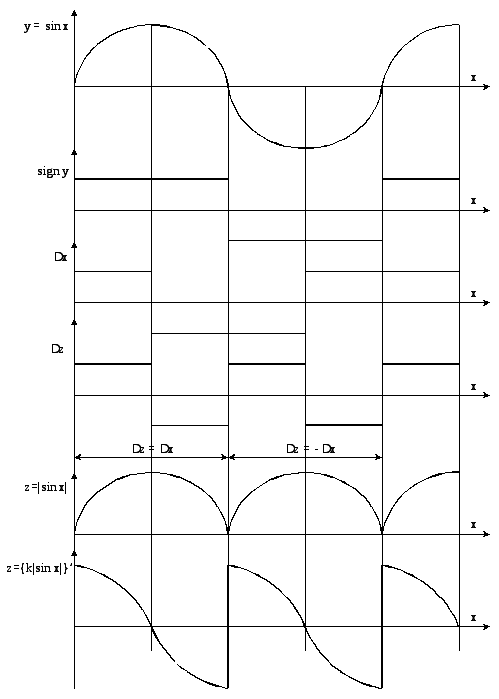
Рис. 5.10
Графо-аналитическое вычисление функции
![]()
Для практического
исследования операций
![]() на ЦИС «Квант-1» приведём блок схему
решения этой задачи (рис. 5.11). Причём
сплошной линией обведены блоки, в которых
вырабатываются потоки приращений,
изображающих функцию
на ЦИС «Квант-1» приведём блок схему
решения этой задачи (рис. 5.11). Причём
сплошной линией обведены блоки, в которых
вырабатываются потоки приращений,
изображающих функцию![]() .
Остальная часть схемы (цифровой интегратор
и индикатор потоков приращений) реализуют
операцию дифференцирования функции
.
Остальная часть схемы (цифровой интегратор
и индикатор потоков приращений) реализуют
операцию дифференцирования функции![]() (что
соответствует схеме дифференцирования,
рис. 5.9). На фото 5.2 приведены графики
функций
(что
соответствует схеме дифференцирования,
рис. 5.9). На фото 5.2 приведены графики
функций![]() и её производной (k
= 0,1), а в таблице 5.1 приведены результаты
решения задачи. На этом же фото приведены
результаты дифференцирования других
функций.
и её производной (k
= 0,1), а в таблице 5.1 приведены результаты
решения задачи. На этом же фото приведены
результаты дифференцирования других
функций.

Рис. 5.11 Структурная
схема реализации
![]()
Таблица 5.1
|
№ |
x |
|
|
|
|
|
1. |
0,5 |
0,04794 |
0,03042 |
0,08782 |
0,05475 |
|
2. |
1,0 |
0,08415 |
0,05305 |
0,05388 |
0,03345 |
|
3. |
1,5 |
0,09975 |
0,06304 |
0,00693 |
0,00343 |
|
4. |
2,0 |
0,09093 |
0,05643 |
-0,04134 |
-0,02512 |
|
5. |
2,5 |
0,05985 |
0,03651 |
-0,08042 |
-0,05113 |
|
6. |
3,0 |
0,01411 |
0,00716 |
-0,09937 |
-0,06270 |
|
7. |
3,5 |
0,03508 |
0,02175 |
0,09335 |
0,05762 |
|
8. |
4,0 |
0,07568 |
0,04657 |
0,06530 |
0,04133 |
|
9. |
4,5 |
0,09775 |
0,06203 |
0,02139 |
0,01274 |
|
10. |
5,0 |
0,09589 |
0,06106 |
-0,02863 |
-0,01652 |
|
11. |
5,5 |
0,07055 |
0,04407 |
-0,07137 |
-0,04442 |
|
12. |
6,0 |
0,02794 |
0,01623 |
-0,09383 |
-0,06104 |
|
13. |
6,5 |
0,02151 |
0,01300 |
0,09065 |
0,05662 |
|
|
|
|
k = 0,1 |
|
|

Фото 5.2
При решении ряда практических задач на ЦИМ приходится производить многократное дифференцирования функций, представленных в виде потоков приращений.
Цифровые интеграторы, входящие в схемы дифференцирования (например, рис. 5.9), обладают свойствами фильтрации нижних частей и сглаживают высококачественные колебания дифференцируемых функции [14].
Использование для многократного дифференцирования функций, представленных потоками приращений дифференцирующего устройства (рис. 5.11), работающего в соответствии с алгоритмом (5.36), блок-схема которого изображена на рис. 5.12, приводит к тому, что точность дифференцирования падает с возрастанием порядка производной из-за колебаний, которые появляются в схеме однократного дифференцирования [14].
Анализ спектральных соотношений в ЦИ и устройстве сравнения даёт основание сделать вывод, что для сохранения точности дифференцирования при переходе от одного дифференцирующего устройства к другому в цепи I – I (рис. 5.12) необходимо ставить цифровой интегратор в качестве фильтра. Структурные схемы оптимальных фильтров приведены на рис. 5.13 и 5.14.

Рис. 5.12 Структурная схема двойного дифференцирования функции

Рис. 5.13 Структурная схема фильтра

Рис. 5.14 Структурная схема фильтра
Блок-схемы многократного дифференцирования с использованием цифровых фильтров (рис. 5.13 и рис. 5.14) для сглаживания колебаний приведены на рис 5.15 и рис. 5.16.
Погрешность дифференцирования в них остаётся постоянной, равной погрешности однократного дифференцирования.
Процесс многократного
дифференцирования исследован на ЦИМ
«Квант-1». В табл. 5.2 для примера приведены
результаты трёхкратного дифференцирования
функции
![]() .
Из этой таблицы видно, что погрешность
операции дифференцирования при
возрастании порядка производной остаётся
постоянной, примерно равной погрешности
однократного дифференцирования.
.
Из этой таблицы видно, что погрешность
операции дифференцирования при
возрастании порядка производной остаётся
постоянной, примерно равной погрешности
однократного дифференцирования.
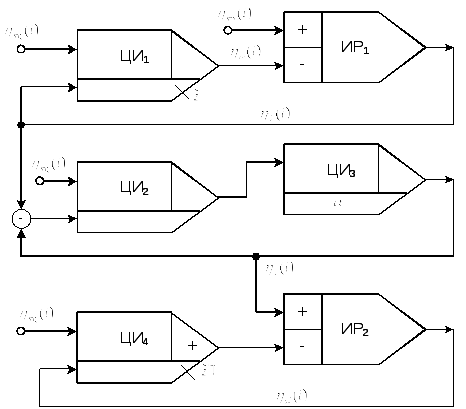
Рис. 5.15 Структурная схема двойного дифференцирования с фильтром

Рис. 5.16 Структурная схема двойного дифференцирования с фильтром
Таблица 5.2
|
NN п/п |
№ интегра-торов |
Знак |
Резу-льтат |
Содержимое регистров Рг У |
NN п/п |
№ интегра-торов |
Знак |
Резу-льтат |
Содержимое регистров Рг У |
|
1 |
2 |
3 |
4 |
5 |
1 |
2 |
3 |
4 |
5 |
|
0 |
01 |
+ |
12500 |
|
15 |
01 |
+ |
14523 |
|
|
02 |
+ |
12500 |
|
02 |
+ |
14527 |
| ||
|
03 |
|
12500 |
|
03 |
|
14500 |
| ||
|
04 |
+ |
12500 |
|
04 |
+ |
14519 |
| ||
|
1 |
01 |
+ |
12626 |
|
16 |
01 |
+ |
14669 |
|
|
02 |
+ |
12613 |
|
02 |
+ |
14677 |
| ||
|
03 |
+ |
12630 |
|
03 |
+ |
14679 |
| ||
|
04 |
+ |
12621 |
|
04 |
+ |
14653 |
| ||
|
2 |
01 |
+ |
12752 |
|
17 |
01 |
+ |
14816 |
|
|
02 |
+ |
12762 |
|
02 |
+ |
14806 |
| ||
|
03 |
+ |
12726 |
|
03 |
+ |
14853 |
| ||
|
04 |
+ |
12784 |
|
04 |
+ |
14802 |
| ||
|
3 |
01 |
+ |
12881 |
|
|
… |
… |
… |
… |
|
02 |
+ |
12887 |
| ||||||
|
03 |
+ |
12871 |
| ||||||
|
04 |
+ |
12823 |
|
27 |
01 |
+ |
16374 |
| |
|
4 |
01 |
|
13010 |
|
02 |
+ |
16365 |
| |
|
02 |
|
12996 |
|
03 |
+ |
16370 |
| ||
|
03 |
|
13036 |
|
04 |
+ |
16390 |
| ||
|
04 |
|
12989 |
|
28 |
01 |
+ |
16539 |
| |
|
|
… |
… |
… |
… |
02 |
+ |
16544 |
| |
|
03 |
+ |
16472 |
| ||||||
|
04 |
+ |
16527 |
| ||||||
|
29 |
01 |
+ |
16705 |
| |||||
|
14 |
01 |
+ |
14376 |
|
02 |
+ |
16716 |
| |
|
02 |
+ |
14367 |
|
03 |
+ |
16676 |
| ||
|
03 |
+ |
14351 |
|
04 |
+ |
16627 |
| ||
|
04 |
+ |
14457 |
|
|
|
|
|
|