

4.6. Примеры, иллюстрирующие работу базовой машины ивс
П р и м е р 1. Построить модель ИВС (конфигурацию ее архитектурных единиц – функциональных модулей) для преобразования полярных координат в декартовы:

Пусть
базис -пространства
включает в себя операторы
![]() ,
т.е.
,
т.е.
![]() Тогда схема перевода имеет вид:
Тогда схема перевода имеет вид:

![]()
Аналогично для F2 имеем:
![]()
Следовательно,
![]()
П р и м е р 2. Требуется построить обобщенную модель ИВС для реализации метода Рунге-Кутта второго порядка при интегрировании дифференциальных уравнений:

в
базисе
![]()
где Т+- оператор суммы;
Тх - оператор произведения;
Тс
- оператор константы 0,5, определяемый в
соответствии с [36]
как
-
нулевой элемент пространства ,
т.к.
![]()
Th - оператор шага интегрирования;
Тf - оператор правой части решаемого дифференциального уравнения y' = f(x, y);
Ту - оператор искомой функции у. Тогда имеем:
![]()

здесь
оператор
![]() является
комплексом, т.к. для него необходимо
иметь аргументы
является
комплексом, т.к. для него необходимо
иметь аргументы
![]() .
.
С
учетом этого замечания, разрешая
уравнение для
![]() относительно
относительно
![]() ,
получим
,
получим
![]()
где
![]() -
комплекс (т.е. оператор для
-
комплекс (т.е. оператор для
![]() ).
).

Рис. 4.3. Соединение ФМ для преобразования полярных координат в декартовые

Рис. 4.4. Граф коммутации ФМ для реализации метода Рунге-Кутта 2-го порядка
На рис. 4.3 приведен граф коммутации (С - структура) функциональных модулей для вычисления декартовых координат, составленный в соответствии с операторным представлением исходной задачи, а на рис. 4.4 представлен граф коммутации ФМ для реализации метода Рунге-Кутта 2-го порядка.
П р и м е р 3. Представить уравнение задачи навигации в операторной форме:
![]()
![]()
где
![]()
![]()
Применяя
алгоритм (4.18) к выражениям ![]() ,
получим
,
получим
![]()
![]()
![]()
![]()
где Tg1, - оператор операции сложения (+);
Tg2 - оператор операции умножения ();
Tg3, - оператор операции вычитания (–).
П р и м е р 4. Построить математическую модель ИВС для вычисления координат точек движения манипулятора робота, система уравнений для расчета которых имеет следующий вид [23, 35]:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Пусть базис операторного пространства для исходной задачи имеет вид
![]() .
.
В результате работы базовой машины Ws, используя выбранный базис, получим операторное представление исходной задачи в следующем виде:
(4.24)
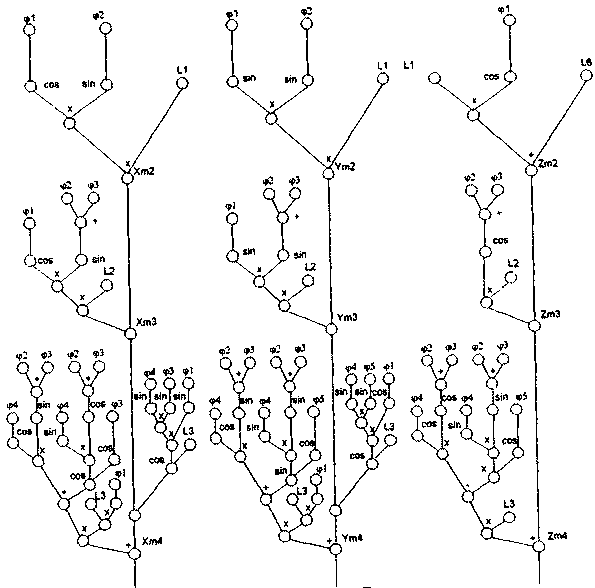
Рис. 4.5. Граф коммутации ФМ
На рис. 4.5 представлен граф коммутации ФМ для вычисления точек движения манипулятора робота, составленный в соответствии с системой (4.24).
Глава пятая. Анализ и синтез универсальных решающих блоков интегрирующих вычислительных структур (ивс)
5.1. Синтез алгоритма универсального решающего блока интегрирующих вычислительных структур
При
построении решающих блоков интегрирующих
вычислительных структур целесообразно
воспользоваться экстраполяционной
разностно-квантованной схемой
моделирования систем уравнений Шеннона
[109], которая в случае численного
интегрирования по Стилтьесу с погрешностью
порядка
![]() имеет следующий вид [36, 76]:
имеет следующий вид [36, 76]:
(5.1)
где
![]() -функция
расчленения, выделяющая из числат
старших
разрядов [75].
-функция
расчленения, выделяющая из числат
старших
разрядов [75].
В системе (5.1) использованы относительные квантованные переменные, закодированные в дополнительном коде.
Из
общей разностно-квантованной схемы
моделирования уравнений Шеннона,
используя рассчитанные коэффициенты
![]() и беря определенные значения
и беря определенные значения
![]() ,
можно получать конкретные формулы
численного интегрирования интеграла
Стилтьеса [76].
,
можно получать конкретные формулы
численного интегрирования интеграла
Стилтьеса [76].
(5.2)
которые могут быть положены в основу синтеза алгоритмов функционирования решающих блоков ИВС; n = 4, 5, 6, … .
Величины
![]() являются постоянными коэффициентами,
зависящими от индексов,
и n,
и могут быть представлены в следующей
форме:
являются постоянными коэффициентами,
зависящими от индексов,
и n,
и могут быть представлены в следующей
форме:

причём значения индексов изменяются в пределах + 1 n – – 3.
В свою очередь
коэффициенты ![]() вычисляются по выражениям экстраполяционных
формул Адамса.
вычисляются по выражениям экстраполяционных
формул Адамса.
Например, коэффициенты
![]() интерполяционных формул численного
интегрирования по Стилтьесу имеют
следующие значения:
интерполяционных формул численного
интегрирования по Стилтьесу имеют
следующие значения:

При построении ИВС на основе современных схем микроэлектроники практически используются:
- формула
прямоугольников
![]() (одноразрядные приращения)
(одноразрядные приращения)
![]() (5.3)
(5.3)
- формула
трапеций
![]() (многоразрядные приращения)
(многоразрядные приращения)
![]() (5.4)
(5.4)
В
параллельных ИВС использование формул
квадратичных парабол,
![]() кубичных
парабол, а также более сложных формул
при
кубичных
парабол, а также более сложных формул
при
![]() ,
реализации
решающих блоков пока что затруднительно
из-за большого расхода оборудования.
,
реализации
решающих блоков пока что затруднительно
из-за большого расхода оборудования.
В тех
случаях, когда требуется строить решающие
блоки, оперирующие с многоразрядными
приращениями и обеспечивающие высокую
точность вычислений
![]() и большое быстродействие
и большое быстродействие![]() предпочтительнее использовать формулу
кубичных парабол, так как она почти
эквивалентна по расходу оборудования
формуле квадратичных парабол, но
обеспечивает
более высокую точность
вычислений
(здесь
- погрешность внешней;
предпочтительнее использовать формулу
кубичных парабол, так как она почти
эквивалентна по расходу оборудования
формуле квадратичных парабол, но
обеспечивает
более высокую точность
вычислений
(здесь
- погрешность внешней;
![]() - граничная частота,
определяющая полосу пропускания частот
решающего блока).
- граничная частота,
определяющая полосу пропускания частот
решающего блока).
В работах [36, 76] заложены основы построения обобщенных цифровых интеграторов, которые, как следует из системы (5.1), должны выполнять операции экстраполяции и суммирования приращений и численного интегрирования. В дальнейших исследованиях [11, 12, 13, 14, 21, 22, 24, 36, 40, 62, 75, 76, 77, 85, 86, 88, 89] и ряде других разработаны универсальные решающие блоки, стандартные операционные и вычислительные блоки, цифровые решающие модули и, наконец, функциональные модули, о которых будет идти речь в следующих разделах.
Для расширения вычислительных и функциональных возможностей УРБ и упрощения процесса набора задач, особенно при управлении и моделировании систем автоматического регулирования, в алгоритм УРБ, кроме вычислительных операций, введены логические операции [14, 76]. При реализации определенных логических функций (гистерезисной, релейной, трения и др.) необходимо вводить те или иные логические операции (ограничения, знака, выделения абсолютного значения функции, выделения максимальных и минимальных значений функции и др.). В работе [14] показано, что при решении задач логического характера на УРБ, оперирующем с одноразрядными приращениями, достаточно в его алгоритм ввести логические операции знака и запрета.
При ограничении, например, функции по уровню, которое часто выполняется в задачах управления движением объектов [27, 36], происходит реализация типичной нелинейной характеристики насыщения. В работах [76, 104] и других показано, что для организации логических функций на УРБ, работающих с многоразрядными приращениями, достаточно ввести логические операции ограничения функции, выделения минимальных и максимальных значений функции, выделения абсолютного значения функции.
Если в алгоритм УРБ (5.1) ввести перечисленные логические операции, то получим алгоритм универсального решающего блока, оперирующего с много-разрядными приращениями и реализующего вычислительные и логические операции:
(5.5)

где Ф, 0 - функции квантования [36, 75, 76]
А - признак операции суммирования приращений;
B
- признак
операции численного интегрирования с
квантованием приращений
![]() ;
;
С - признак операции экстраполяции приращений;
D - признак операции сложения приращений;
Е - признак операции слежения;
Yo - признак формирования начальных данных.
I - признак операции ограничения, в которой i - номер шага вычислений, т - количество разрядов приращений, n - количество разрядов накапливаемой величины (подынтегральной функции).
Если
ограничение происходит сверху, то
начальные данные, вносимые в регистр
накопления величины у,
равны
![]() при ограничении снизу
при ограничении снизу![]() ;
;![]() -
значение входной функции у
в
начале вычислений; величины а
и
b
являются
соответственно верхним и нижним уровнями
ограничения;
-
значение входной функции у
в
начале вычислений; величины а
и
b
являются
соответственно верхним и нижним уровнями
ограничения;
L - признак операции выделения min и max функции.
Для этой операции y1 = +1 при выделении min значений функции и у1 = -1 при выделении max значений функции;
|L| - признак операции выделения абсолютного значения функции.
Здесь
-
коэффициент, зависящий от знаков
![]() :
:

Алгоритм (5.5) является универсальным и он синтезирован с точки зрения обобщения результатов синтеза алгоритмов УРБ. Кроме того, этот алгоритм в общем случае используется для представления машинного алгоритма УРБ и разработки системы автоматического масштабирования переменных и приращений в УРБ ИВС.
Синтезируем машинный алгоритм универсального решающего блока ИВС, используя систему (5.5).
В интегрирующих вычислительных структурах, в которых решающие блоки оперируют над числами с фиксированной запятой, необходимо все математические переменные и их приращения приводить к машинным переменным. Этот процесс осуществляется с помощью операции масштабирования.
Так как в ИВС с фиксированной запятой область представления чисел ограничена по модулю некоторой величиной, то, обозначив множество всех представляемых в структуре чисел через {Mz}, можно отобразить множество {Z} чисел алгоритма (5.5) на множество Mz с помощью операции масштабирования
![]() (5.6)
(5.6)
где MZ - мантисса числа, P0 - основание системы счисления, ПZ - порядок числа.
В общем случае приращение интеграла можно вычислить по следующей формуле:
![]() (5.7)
(5.7)
Вычисление этого интеграла в УРБ с фиксированной запятой необходимо производить следующим образом:
![]() (5.8)
(5.8)
Пользуясь выражением (5.6) и приняв в нем P0 = 2, приращение интеграла (5.7) можно вычислить по следующему машинному соотношению:
![]() . (5.9)
. (5.9)
Если в систему (5.5) подставить выражения всех переменных через машинные уравнения (5.6)-(5.9), то получим машинный алгоритм УРБ ИВС, оперирующий с фиксированной запятой [26], в котором из системы (5.5) для упрощения оставлены только операции А, В, С:
(5.10)

Из проведенных рассуждений ясно, что реализация машинных алгоритмов решения задачи – весьма трудоемкий процесс из-за необходимости масштабирования переменных и их приращений. Поэтому разработаны способы автоматического масштабирования. Без автоматического масштабирования принципиально невозможно строить ИВС модульного типа, так как функциональные модули, построенные на основе УРБ, должны в процессе отображения и решения задач перестраиваться.