

8.2.2. Опорные части и ходовые устройства
Рис.
8.28. Опорная часть крана КБ-503
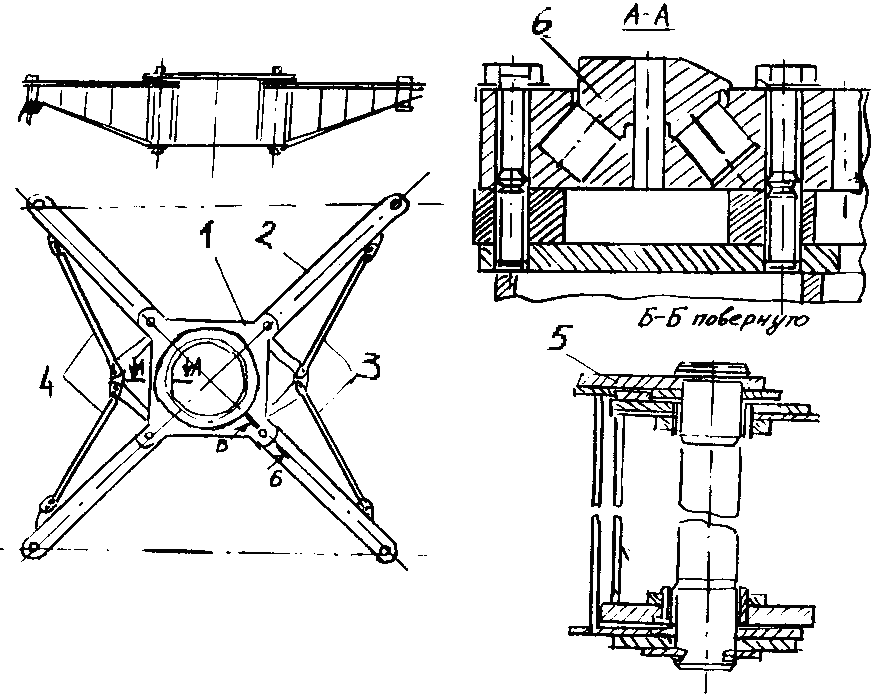
При перевозке крана тяги отсоединяют и все четыре флюгера поворачивают вдоль движения в размер транспортного габарита.
Здесь же видна схема установки на опорную часть ОПУ 6 с двумя горизонтальными рядами роликов. Принцип работы ОПУ такой же, как у стреловых кранов.
Ходовое устройство башенных, как и стреловых, кранов состоит из рамы и ходовых тележек с колесами. Ходовые части могут иметь нежесткие и жесткие рамы, что существенно сказывается и на принципе их работы. Так, металлоконструкции ходовых устройств с нежесткой рамой обладают большей податливостью, в связи с чем в процессе движения крана ходовые колеса свободно копируют рельсовый путь. В отличие от них ходовые устройства с жесткой рамой менее податливы и в процесс движения не копируют все неточности крановых путей в вертикальной плоскости.
У большинства современных башенных кранов предусмотрены устройства, позволяющие компенсировать практически все отклонения размеров путей и ходовых рам в вертикальной плоскости и исключить тем самым опасный для башенных кранов отрыв колес.
Рис. 8.29. Механизм
передвижения
башенного крана
с нежесткой рамой
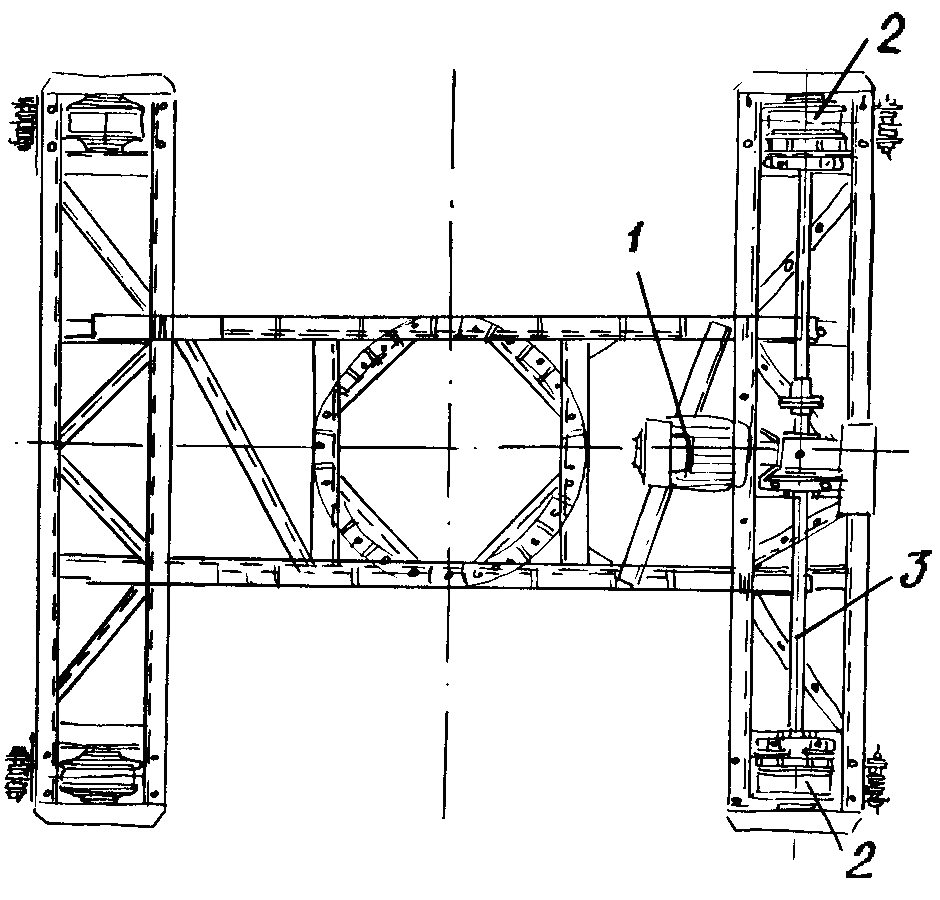
Крутящий момент от электродвигателя 1 к колесам 2 передается с помощью вала 3.
Ведущие колеса при этом можно располагать как на двух рельсах, так и на одном.
Ходовые тележки башенных кранов в настоящее время унифицированы.
В качестве базовой принята единая двухколесная ходовая тележка (рис. 8.30).
Тележка состоит из рамы 7, ходовых колес 2, рельсового захвата 1, предохраняющего тележку от схода с рельса, кожуха 4 и шкворня 6, с помощью которого тележка крепится к раме крана.
Колеса такой тележки приводятся во вращение электродвигателем 8 через вал 9, закрепленную на нем зубчатую шестерню и зубчатые колеса 3.
Рис. 8.30. Двухколесная
ходовая
тележка
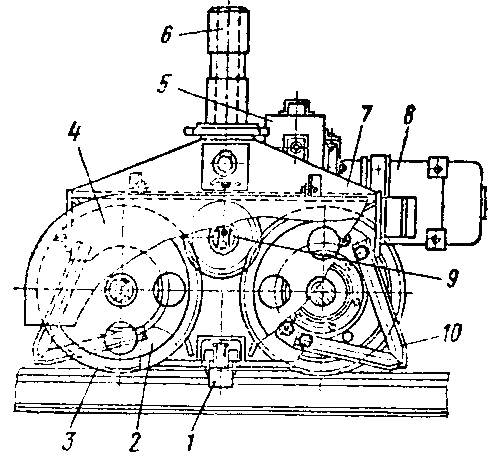
Скребок 10 обеспечивает очистку рельсового пути от загрязнений (снега, льда) при работе крана в зимнее время и от предметов, случайно попавших на рельс.
В зависимости от нагрузки на опору изменяется или число колес в тележке, или число базовых тележек. Ходовые тележки могут отличаться также числом приводных колес.
8.2.3. Привод и основные механизмы башенных кранов
Башенные краны имеют те же механизмы, что и стреловые: передвижения, подъема, поворота, изменения вылета крюка (см. п. 8.1.3).
Механизмы передвижения башенных кранов на рельсовом ходу унифицированы и описаны в п. 8.2.2.
Механизм подъема груза (грузовая лебедка) башенного крана – многоскоростная электрореверсивная лебедка (см. п. 8.1.3.2). На кранах с подъемной стрелой грузовая лебедка 10 установлена на поворотной платформе (рис. 8.27, а); на кранах с неподвижной стрелой – на противовесной консоли 19.
Изменение вылета крюка у башенных кранов достигается либо подъемом стрелы (рис. 8.27, а), либо при неподвижной горизонтальной стреле перемещением вдоль нее грузовой тележки (рис. 8.27, б).
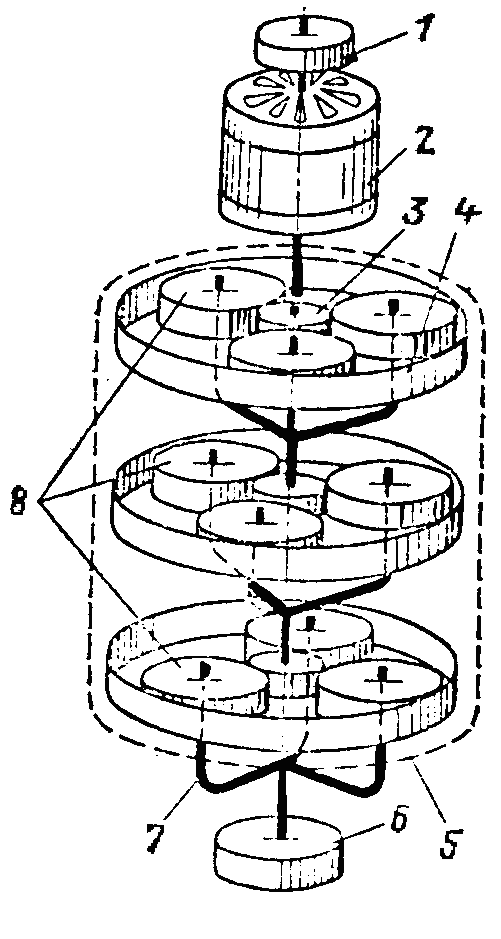
Рис.
8.31. Схема механизма
поворота башенного
крана
с
планетарным редуктором
Механизмы поворота 11 в зависимости от расположения ОПУ могут устанавливаться внизу на поворотной платформе 12 (рис. 8.27, а) или вверху возле кабины. Механизмы поворота могут быть с планетарными или цилиндрическими редукторами, с горизонтальным или вертикальным расположением выходного вала.
Кинематическая схема унифицированного механизма поворота с планетарным редуктором показана на рис. 8.31.
В вертикально расположенном редукторе 5 размещены три одинаковых по конструкции передачи (три ступени).
В планетарном редукторе вращение передается от центральной верхней солнечной шестерни 3 к нескольким (обычно трем) шестерням-сателлитам 8, расположенным равномерно по окружности. Сателлиты закреплены на осях, фиксируемых на водиле 7. Водило предыдущей ступени связано с солнечной шестерней последующей. Водило 2 последней ступени связано с выходной шестерней 6, обкатывающейся по зубчатому венцу ОПУ.
Большинство кранов имеют один механизм поворота, однако при больших маховых массах крана устанавливают на общий зубчатый венец ОПУ по 2, 3, 4 механизма поворота. При этом удается обеспечить широкую унификацию механизмов, так как практически весь ряд башенных кранов может быть оборудован механизмом поворота всего одного типа с различными исполнениями по мощности привода и по размерам сменной выходной шестерни.
Конструкции канатно-блочных систем, грузозахватных органов и приспособлений, а также приборов и устройств безопасности башенных кранов, аналогичны применяющимся в стреловых кранах.