

Добавил:
ivanov666
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:Математическое моделирование в естественных науках
..pdf
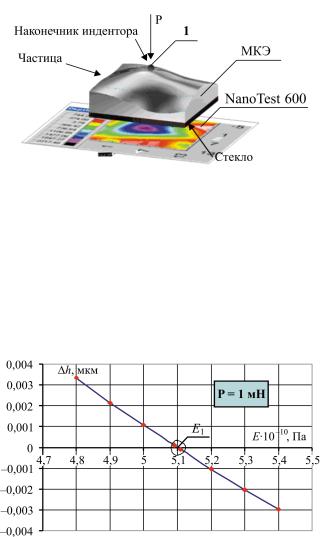
Рис. 1. Моделирование методом конечных элементов (МКЭ) поверхности частицы, созданной на основе результатов процедуры сканирования системой NanoTest 600
8.Далее пункты 4–7 повторяются до тех пор, пока разность экспериментальной и расчетной глубины проникновения индентора в частицу не будет меньше заданной малой величины.
9.Модуль упругости, полученный из последнего расчета, является модулем упругости частицы.
Рис. 2. Зависимость Е( h) для нагрузки индентирования 1 мН
Работа выполнена в рамках государственного задания ИжГТУ им. М.Т. Калашникова № 201445-1239.
507
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]