

О.А. Дмитриев
ЭЛЕКТРИЧЕСКИЙ
ПРИВОД
Воронеж 2008
ГОУВПО «Воронежский государственный техничес-
кий университет»
О.А. Дмитриев
ЭЛЕКТРИЧЕСКИЙ ПРИВОД
Утверждено Редакционно-издательским советом
университета в качестве учебного пособия
Воронеж 2008
УДК 631.3
Дмитриев О.А. Электрический привод: учеб. пособие/ О.А Дмитриев, Воронеж: ГОУВПО «Воронежский государственный технический университет», 2008. 195 с.
В учебном пособии рассматриваются вопросы построения электрических приводов постоянного и переменного тока, ана-лиза электромеханических и механических характеристик электрических машин, динамических свойств электроприво-дов, проектирования автоматизированных электроприводов. Учебное пособие предназначено для организации самостоя-тельной работы студентов очной формы обучения,
Издание соответствует требованиям Государственного об-разовательного стандарта высшего профессионального обра-зования по направлению 140600 «Электротехника, электро-механика и электротехнологии», специальности 140604 «Элек-тропривод и автоматика промышленных установок и техноло-гических комплексов», дисциплине «Электрический привод».
Учебное пособие подготовлено в электронном виде в текс-товом редакторе MS Word 2003 и содержится в файле УП – ЭЛ – ПР.
Табл. 2. Ил. 101. Библиогр.: 9 назв.
Научный редактор д-р техн. наук, проф.В.Л. Бурковский.
Рецензенты: кафедра автоматизации технологических
процессов Воронежского государственного
архитектурно-строительного университета
(зав. кафедрой д-р техн. наук, проф.
В.Д. Волков) ;
д-р техн. наук, проф. В.М. Питолин
© Дмитриев О.А., 2008
© Оформление. ГОУВПО «Воронежский
государственный технический универ-
ситет», 2008
ВВЕДЕНИЕ
Эффективность средств производства, которыми располагает человеческое общество, в значительной степени определяется совершенством способов получения энергии, необходимой для выполнения механической работы в производственных процессах. В свое время создание паровой машины взамен гидравлического двигателя послужило мощным толчком к развитию производства в XIX в., названном веком пара. Наш XX в. получил название века электричества в первую очередь потому, что основным источником механической энергии в нем стал более совершенный электрический двигатель и основным видом привода рабочих машин в промышленном производстве является электрический привод, а на современном уровне техники автоматизированный электропривод.
Современный электропривод отличается широким разнообразием применяемых средств управления - от обычной коммутационной аппаратуры до ЭВМ, большим диапазоном мощностей двигателей – от долей ватта до 50000 кВт , диапазоном регулирования скоростей до 10000:1 и более. Электропривод является основой автоматизации технологических объектов в промышленности, сельском хозяйстве, космосе и т.д.
Широкое внедрение электрического привода во все отрасли промышленности и всё возрастающие требования к статическим и динамическим характеристикам электропривода предъявляют повышенные требования к профессиональной подготовке студентов, специализирующихся в области электрического привода.
3
1. Основные сведения об электро-
ПРИВОДЕ
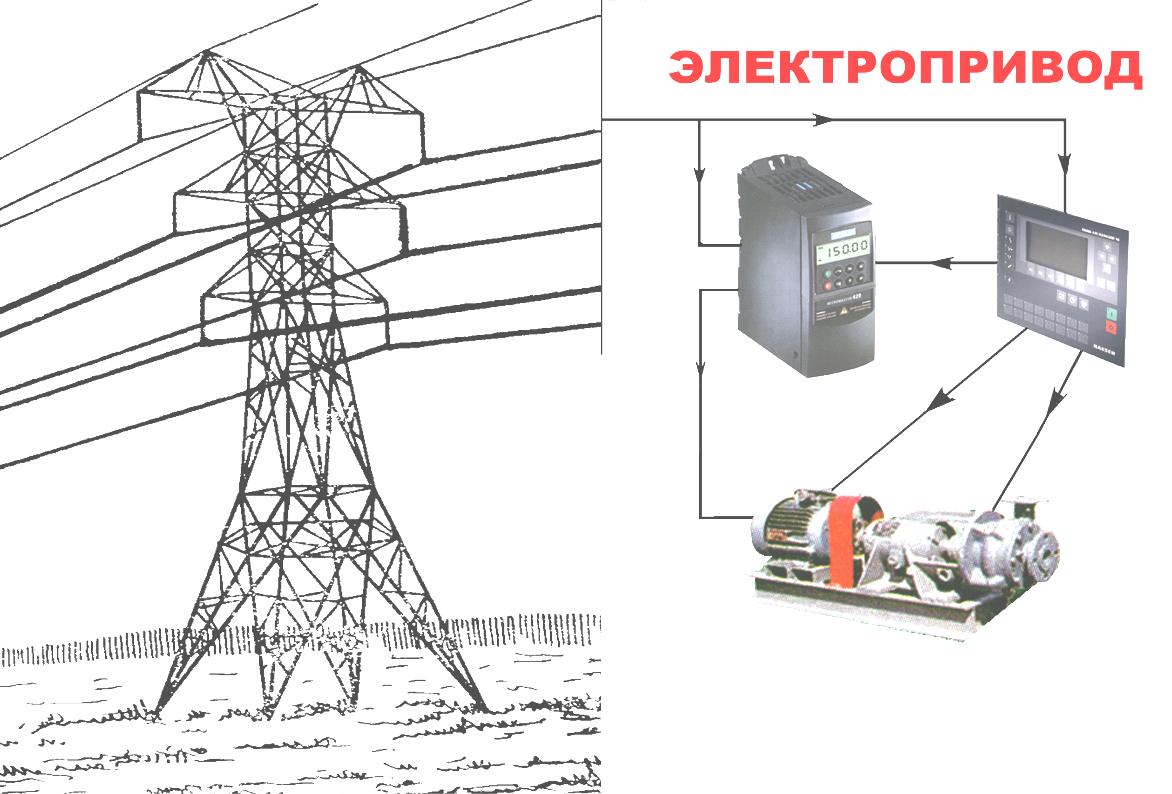
Автоматизированным электроприводом называется элект-ромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение органов рабочего механизма и управления этим движением.
Структурная схема автоматизированного электропривода приведена на рисунке. В ней можно выделить три основных элемента:
1) механическая часть привода МЧ, включающая рабочий механизм РМ, передаточное устройство ПУ, предназначенное для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины и для изменения вида и скорости движения и усилия (момента вращения);
2) электродвигательное устройство ЭД, предназначенное для преобразования электрической энергии в механическую или механической энергии в электрическую. На схеме электродвигательное устройство (или двигатель) представлено двумя элементами: электромеханическим преобразователем энергии ЭМП (на вход которого подаются электрические сигналы в виде напряжения и тока), преобразующим электрическую мощность в механическую мощность, и массой ротора двигателя РД, на которую воздействует момент М двигателя при угловой скорости ω;
3) система управления СУ, состоящая из силовой преобразовательной части П (преобразователя), управляющего устройства У, задающего устройства ЗУ и датчиков обратных связей — электрических ДОСЭ и механических ДОСМ1 и ДОСМ2. Преобразователь П предназначен для питания двигателя и создания управляющего воздействия на него. Он преобразует род тока или напряжение, или частоту либо изменяет иные показатели качества электрической энергии, подводимой к двигателю. Устройство У, управляющее преобразователем П, получает командные сигналы от задающего устройства ЗУ, а информацию о текущем состоянии электропривода
4

5
и технологического процесса - от датчиков обратных связей. С помощью этих датчиков ток, напряжение, мощность двигателя или другие его электрические параметры, скорость, момент или усилие и положение (перемещение) исполнительного органа, преобразуются в пропорциональные этим параметрам электрические сигналы, которые и подаются в управляющее устройство У. В нем текущее состояние электропривода и технологического процесса сравнивается с заданным и при наличии рассогласования вырабатывается управляющий сигнал, воздействующий через преобразователь П на электропри-вод в направлении устранения возникшего рассогласования с требуемой точностью и быстродействием.
Ниже приведены наиболее распространенные примеры испол-
нительных органов и элементов электропривода:
1. Рабочий механизм:
шпиндель токарного станка; подвижной стол строгального станка; лента (цепь) конвейера; ковш экскаватора; кабина подъемника; крыльчатка насоса; валки прокатного стана; ходовой винт механизма подачи. станка; тележка механизма передвижения крана; крюк подъемной лебедки.
2. Электродвигатель:
двигатель постоянного тока с разными видами возбуждения; асинхронный двигатель с фазным или короткозамкнутым ротором; синхронный двигатель; линейные двигатели постоянного или перемени тока; вентильный двигатель; шаговый двигатель; двигатели с катящимися и волновыми роторами; редукторные двигатели.
3. Передаточное устройство:
цилиндрические и червячные редукторы; планетарная пере-дача; передача винт-гайка; волновая передача; кривошипно- шатунная передача; цепная и ременная передачи; реечная передача.
4. Преобразователь:
управляемый выпрямитель; преобразователи частоты, напряжения переменного тока; импульсные преобразователи на
6
пряження; инверторы.
5. Задающее устройство:
кнопка, ключ управления; регулятор; управляющая вы-числительная машина; реле; логические элементы; уси-литель; фазовый детектор.
6. Источник электрической энергии:
однофазная или трехфазная сеть переменного тока про-мышленной частоты; цеховая сеть постоянного тока; ак-кумуляторная батарея; дизель-генераторная установка; солнечная батарея.
. 1.1. Классификация автоматизированных
электроприводов
Электроприводы, используемые в различных технологичес-ких установках, разнообразны по схемному и конструктивному исполнению, что связано с большим разнообразием рабочих машин. Классификация электроприводов по отдельным признак дана в таблице [6] Классификация по виду движения. Наибольшее, а до недавнего времени исключительное применение получили электроприводы вращательного движения. Однако в последнее время значительное внимание уделяется линейным двигателям. В тех механизмах, где рабочий орган совершает поступательное или возвратно-поступательное движение применение линейных двигателей конструктивно гораздо удобнее, чем использование специальных кинематических пар: винт-гайка, шарико-винтовые передачи, кривошипно-шатунный механизм и др. Из-за низких энергетических и массогабаритных показателей линейные электродвигатели не находили применения. Создание новых эффективных конструкций линейных двигателей с питанием их от полупроводниковых преобразователей частоты открывает новые возможности использования линейных электроприводов для ря-
да производственных машин, в первую очередь, для металлорежущих станков. Многокоординатные электроприводы на основе специальных шаговых электродвигателей являются отечествен
7
Классификация автоматизированных электроприводов
Классификационный признак |
Классификационные градации |
По виду движения электродвигателя |
1. Вращательного движения 2. Линейный 3. Многокоординатного движения |
По способу соединения двигателя с рабочим органом |
1. Редукторный 2. Безредукторный 3. Конструктивно- интегрированный |
По регулируемости |
1. Нерегулируемый 2. Многоскоростной 3. Регулируемый
|
По степени автоматизации
|
1. С ручным управлением 2. С полуавтоматическим управлением З. С замкнутой САР скорости с ручным заданием 4. С замкнутой САР положе- ния, обеспечивающей точ- ное позиционирование 5. С программным управле- нием 6. Следящий |
По числу электродви-гателей |
1. Однодвигательный 2. Многодвигательный |
По числу рабочих органов |
1 .Индивидуальный 2. Групповой 3. Взаимосвязанный |
ной разработкой и находят применение в высокоточных робототехнических установках, сборочных автоматах и для других целей.
Под регулируемостью понимается возможность измене-ния или точного поддержания скорости, ускорения или мо- мента (усилия) приводного электродвигателя. Исторически сложилось, что большинство существующих электроприводов выполнено на базе короткозамкнутых асинхронных электродвигателей, не допускающих в стандартной схеме их питания регулирования скорости или момента. Модификацией односко-
8
ростных асинхронных электродвигателей являются двух и трехскоростные двигатели. Электроприводы с многоскоростными двигателями дают возможность получать две или три фиксированные рабочие скорости, но не могут обеспечить плавного регулирования скорости в заданном диапазоне. К подобным по управляемости можно также отнести электроприводы с реостатно-контакторным управлением. Такие приводы не дают возможности регулировать момент и ускорение электропривода и формировать требуемый характер изменения скорости во времени. Поэтому электропривод с многоскоростными электродвигателями и с контакторным управлением не может рассматриваться как регулируемый.
Понятие регулируемый электропривод включает в себя следующее:
установка по заданию любой скорости в пределах заданного диапазона;
стабилизация установленного значения скорости с заданной точностью при возмущающих воздействиях, например, изменении нагрузки на валу двигателя;
регулирование момента, развиваемого двигателем в двигательном и тормозном режимах, и ускорения (замедления) электропривода;
формирование требуемого характера изменения ско-рости во времени ω= f(t) с заданной точностью.
Современной тенденцией является все более широкое пользование регулируемых электроприводов.
В зависимости от диапазона регулирования скорости, регулируемые электроприводы разделяются на:
- регулируемые приводы с ограниченным диапазоном регулирования (не более 2:1);
регулируемые приводы общего назначения с диапазоном регулирования не выше 100:1;
- широкорегулируемые электроприводы (диапазон регулиро-вания скорости порядка 1000:1);
- высокоточные электроприводы (диапазон регулирова-
9
ния 10000:1);
прецизионные электроприводы (диапазон регулирования 30000:1 и выше).
Классификация электроприводов по степени автомати-зации включает в себя электроприводы с системами управления, различающимися по их функциональным возможностям и сложности. Наиболее простые системы с ручным управлением характерны для нерегулируемых электроприводов. Такие электроприводы имеют систему управления на основе релейно-контакторной аппаратуры, выполняющей функции пуска, останова, защиты и блокировки.
Электроприводы с полуавтоматическим управлением подразумевают управление электропривода оператором с помощью командно - контроллера, кнопок управления и других аппаратов. Система управления содержит элементы автоматического управления и регулирования, обеспечивающие автоматическое изменение параметров электропривода (например, переключение ступеней сопротивления пускового реостата в функции тока или времени) в соответствии с командами оператора. Такие системы характерны, например, для электропривода грузоподъемных механизмов.
Для регулируемого электропривода, как правило, используются замкнутые САР по току и скорости. В этом случае управление может осуществляться оператором, как это производится, например, машинистами экскаваторов, реверсивных прокатных станов и других машин. Задание на скорость может также определяться системой технологической автоматики (например, бумагоделательные машины, дозаторы и другие машины). Следующей разновидностью являются позиционные элект-
роприводы, которые обеспечивают точную остановку рабочего органа механизма в заданном положении. Системы управления такими электроприводами содержат замкнутый контур положения, действующий постоянно или при входе рабочего органа в зону точной остановки
.
10
Если задающее воздействие на параметры движения рабочего органа задается программными средствами, то такие электроприводы составляют класс электроприводов с числовым программным управлением (ЧПУ). Приводы с ЧПУ содержат замкнутые контуры регулирования по скорости и положению.
Если положение рабочего органа должно изменяться в соот-
ветствии с заданием, характер которого заранее неизвестен, то функцией электропривода в этом случае является слежение и отработка этого задания с необходимой точностью. Такой электропривод называется следящим.
Одним из определяющих вопросов при проектировании электромеханических комплексов является выбор системы автоматизированного электропривода. Прежде всего, нужно решить вопрос: следует ли применять регулируемый электропривод или можно обойтись более простым нерегулируемым.
В последние годы регулируемый электропривод активно вытесняет нерегулируемый. Технико-экономическими основаниями для применения регулируемого электропривода являются:
-технологические требования, связанные с необходимостью регулирования момента, скорости и положения в ходе технологического процесса (например, металорежущие станки, грузоподъемные краны и др.);
- возможность оптимизации технологического процесса за счет регулирования электромеханических параметров (например, прокатные станы и др.);
-повышение эффективности использования электроэнергии,
ее экономия при использовании регулируемого электропривода (насосы, вентиляторы и другие машины);
- автоматизация рабочих машин и технологических комп-
лексов, которая в большинстве случаев невозможна без исполь-
зования регулируемого электропривода;
обеспечение стабильности качества производимой продукции (при изменении параметров сырья, условий производства, износ инструмента, требующих адаптации технологической процесса для сохранения качества продукции);
11
создание гибких технологий, машинных комплексов производств (т.е. комплекса машинного оборудования, который может перестраиваться на выпуск новой продукции без изменения самих рабочих машин).
Приведенный перечень показывает, что регулируемый электропривод является, особенно в перспективе, определяющим видом автоматизированного электропривода..