Решетчатые функции и z-преобразование
При рассмотрении разностных уравнений важную роль играет z-преобразование. Но прежде чем приступить к изучению этого преобразования, познакомимся с классом дискретных функций, называемых решетчатыми функциями.
Решетчатые
функции. Дискретная функция
x(t)
по определению есть функция, которая
определена в дискретные моменты времени
t = lT (l =
0,1,
2,...).
Далее дискретную функцию будем записывать
в виде
х[lТ],
используя
t
как непрерывную переменную. В теории
дискретных систем рассматривают особый
тип дискретных функций, называемых
решетчатыми функциями.
Решетчатая функция
х[lТ]
характеризуется тем, что она определяется
непрерывной функцией (функцией
непрерывного аргумента)
x(t)
и принимает ее значения в моменты
t = lT (l =
0,1,
2, ...).
Кроме того, используется
смещенная решетчатая функция
![]() ,
которая принимает значения непрерывной
функции в моменты
,
которая принимает значения непрерывной
функции в моменты![]() (l = 0,1,2,...).
Поэтому когда говорят о решетчатой и
смещенной решетчатой функциях,
предполагают, что существует непрерывная
функция, которая определяет эти функции.
(l = 0,1,2,...).
Поэтому когда говорят о решетчатой и
смещенной решетчатой функциях,
предполагают, что существует непрерывная
функция, которая определяет эти функции.
Определение z-преобразования
z-преобразованием, или преобразованием Лорана, называется соотношение
 (12.1.17)
(12.1.17)
ставящее в соответствие дискретной функции х[1Т] функцию комплексного переменного X*(z). При этом х[1Т] называют оригиналом, a X*(z) — изображением или z-изображением. Оригинал и его изображение обозначают одноименными буквами: оригинал — строчной буквой, а изображение — прописной буквой со звездочкой.
z-преобразование также условно записывают в виде
X*(z) = Z{x[lT]},
а обратное z-преобразование — в виде
x[1Т] = Z-1{X*(z)}.
Предполагается, что в z-преобразовании (12.1.17) дискретная функция обладает следующими свойствами:
1)
существуют положительные числа М и q
такие, что
![]() при
любых
при
любых
![]() ;
;
2) х[lТ] = 0 при всех l < 0.
Свойство 1) необходимо для существования области сходимости ряда в правой части (12.1.17), а свойство 2) используется при выводе некоторых свойств z-преобразования. Функции, удовлетворяющие указанным двум свойствам, называют функциями-оригиналами.
z-преобразование
от смещенной решетчатой функции
![]() ,
т.е. соотношение
,
т.е. соотношение
 называют
модифицированным z-преобразованием.
Модифицированное z-преобразование
также записывают в виде
называют
модифицированным z-преобразованием.
Модифицированное z-преобразование
также записывают в виде
![]()
Функцию
![]() называют
z-изображением
смещенной решетчатой функции
называют
z-изображением
смещенной решетчатой функции
![]() или
модифицированным z-изображением
решетчатой
функции
х[lТ].
или
модифицированным z-изображением
решетчатой
функции
х[lТ].
Пример
12.1.1. Определить z-изображение
единичной решетчатой функции
х[lТ]
= 1[IT]
и смещенной решетчатой функции
![]()
![]() .
.
Решение.
Так как при всех
![]()
![]() ,
то
,
то
По формуле суммы бесконечно убывающей геометрической прогрессии имеем
![]() .
.
Основные свойства z-преобразования
Так
как
z-преобразование
от
х[lТ]
можно рассматривать как частный случай
модифицированного z-преобразования
при
![]() ,
то рассмотрим свойства модифицированного
я-преобразования. Доказательства
приводятся в конце, после рассмотрения
всех свойств.
,
то рассмотрим свойства модифицированного
я-преобразования. Доказательства
приводятся в конце, после рассмотрения
всех свойств.
1°. Линейность. Модифицированное z-преобразование от линейной комбинации дискретных функций равно линейной комбинации их модифицированных z-преобразований:
 12.1.18
12.1.18
Здесь ai (i = 1, 2,..., п) — константы.
2°. Теорема запаздывания. Модифицированное z-преобразование от функции с запаздывающим аргументом х[(l — т)Т] определяется следующим образом:
![]() . (12.1.19)
. (12.1.19)
3°. Теорема опережения. Модифицированное z-преобразование от функции с опережающим аргументом x[(l + т)Т] определяется следующим образом:
![]() Если
Если
![]() (начальные условия нулевые), то
(начальные условия нулевые), то
![]() . (12.1.20)
. (12.1.20)
4°.
Умножение оригинала на
![]() .
z-преобразование
от произведения
.
z-преобразование
от произведения
![]() определяется следующим образом:
определяется следующим образом:
![]() . (12.1.21)
. (12.1.21)
При
![]() имеем
имеем
![]() (12.1.22)
(12.1.22)
Пользуясь
полученным свойством, найдем обычное
и модифицированное z-изображения
функции
![]() .
.
Модифицированное z-изображение для единичной функции (см. формулу (12.1.23)) имеет вид
Поэтому
если в (12.1.21) положим
![]() ,
то получим
,
то получим
![]() (12.1.23)
(12.1.23)
Отсюда
при
![]() имеем
имеем
 (12.1.24)
(12.1.24)
5°.
Умножение оригинала на
![]() .
z-преобразование
от произведения
.
z-преобразование
от произведения
![]() определяется следующим образом:
определяется следующим образом:
![]() . (12.1.25)
. (12.1.25)
При
![]() имеем
имеем
![]() . (12.1.26)
. (12.1.26)
Найдем
обычное и модифицированное z-изображения
функции
![]() .
Положив в (12.1.25)
.
Положив в (12.1.25)
![]() и
а
= е, получим
и
а
= е, получим![]()
При
![]() имеем
имеем
![]() (12.1.26)
(12.1.26)
6°.
Теорема о свертке.
Произведение изображений
![]() и
и
![]() равно z-преобразованию
от свертки их оригиналов
равно z-преобразованию
от свертки их оригиналов
![]() и
:
и
:
 (12.1.27)
(12.1.27)
При
![]() имеем
имеем
 .
(12.1.28)
.
(12.1.28)
'
7°. Теоремы о граничных значениях. Начальное значение решетчатой функции х[lТ] по ее обычному и модифицированному z-изображению определяется следующим образом:
 . (12.1.29)
. (12.1.29)
Предел
![]() при условии, что он существует,
определяется следующим образом:
при условии, что он существует,
определяется следующим образом:
 .
(12.1.30)
.
(12.1.30)
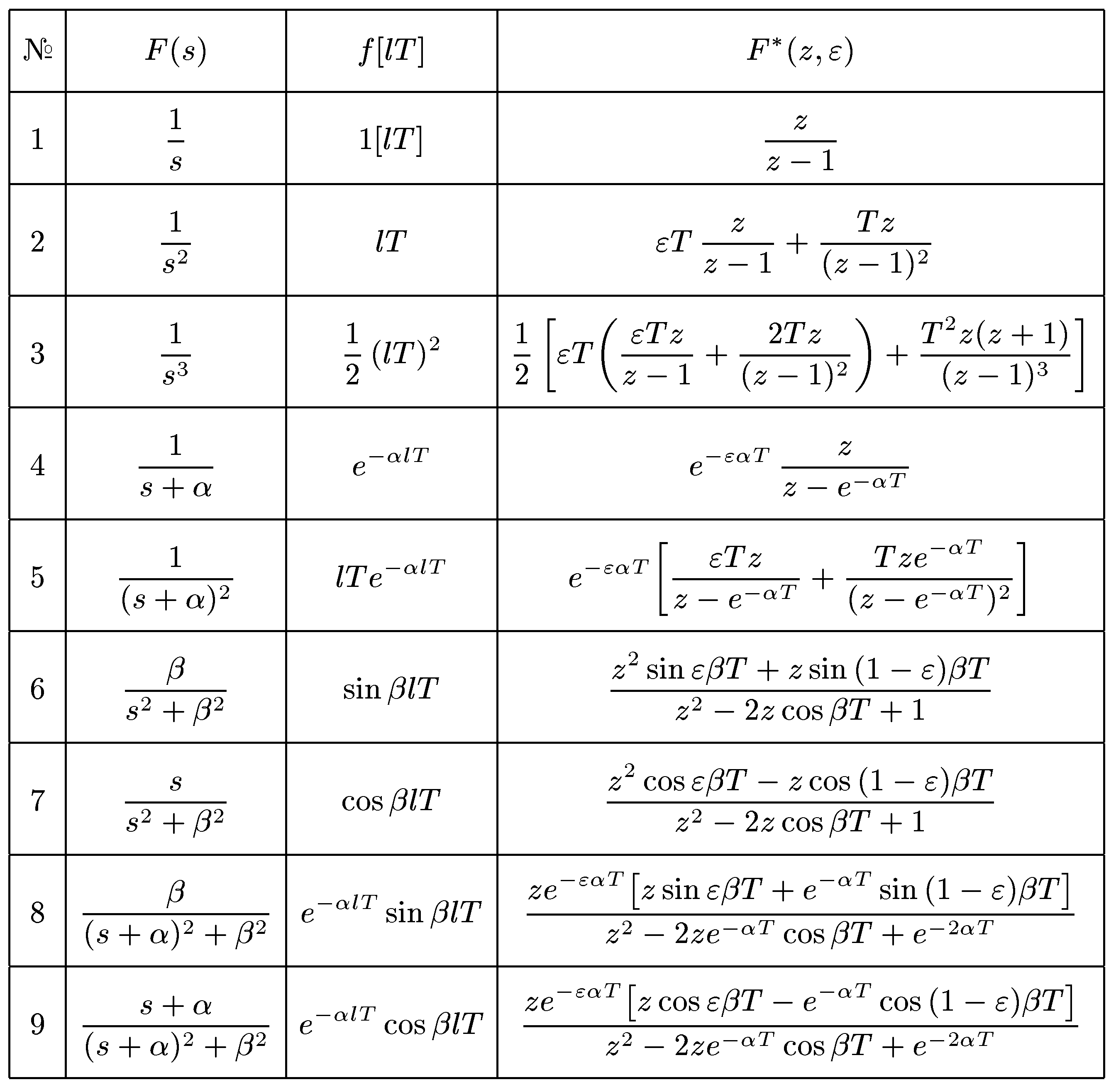
z-изображения основных функций
В табл. 12.1.1 и табл. 12.1.2 представлены соответственно обычные и модифицированные я-изображения основных решетчатых функций. Как отмечалось, решетчатая функция х[lТ] получается путем квантования (дискретизации) по времени непрерывной функции x(t). В дальнейшем потребуется вычислять z-изображение решетчатой функции по известному изображению Лапласа X(s) непрерывной функции x(t). И при этом чтобы избежать этапов вычисления x(t) путем обратного преобразования Лапласа и дискретизации, в указанных таблицах в первом столбце приведены изображения Лапласа соответствующих непрерывных функций.
Рассмотрим вывод формул, приведенных в табл. 12.1.1 и табл. 12.1.2. И так как формулы для обычных z-изображений получаются из формул для модифицированных z-изображений при l= 0, ограничимся выводом формул, приведенных в табл. 12.1.2.
Таблица 12.1.1. z-изображения
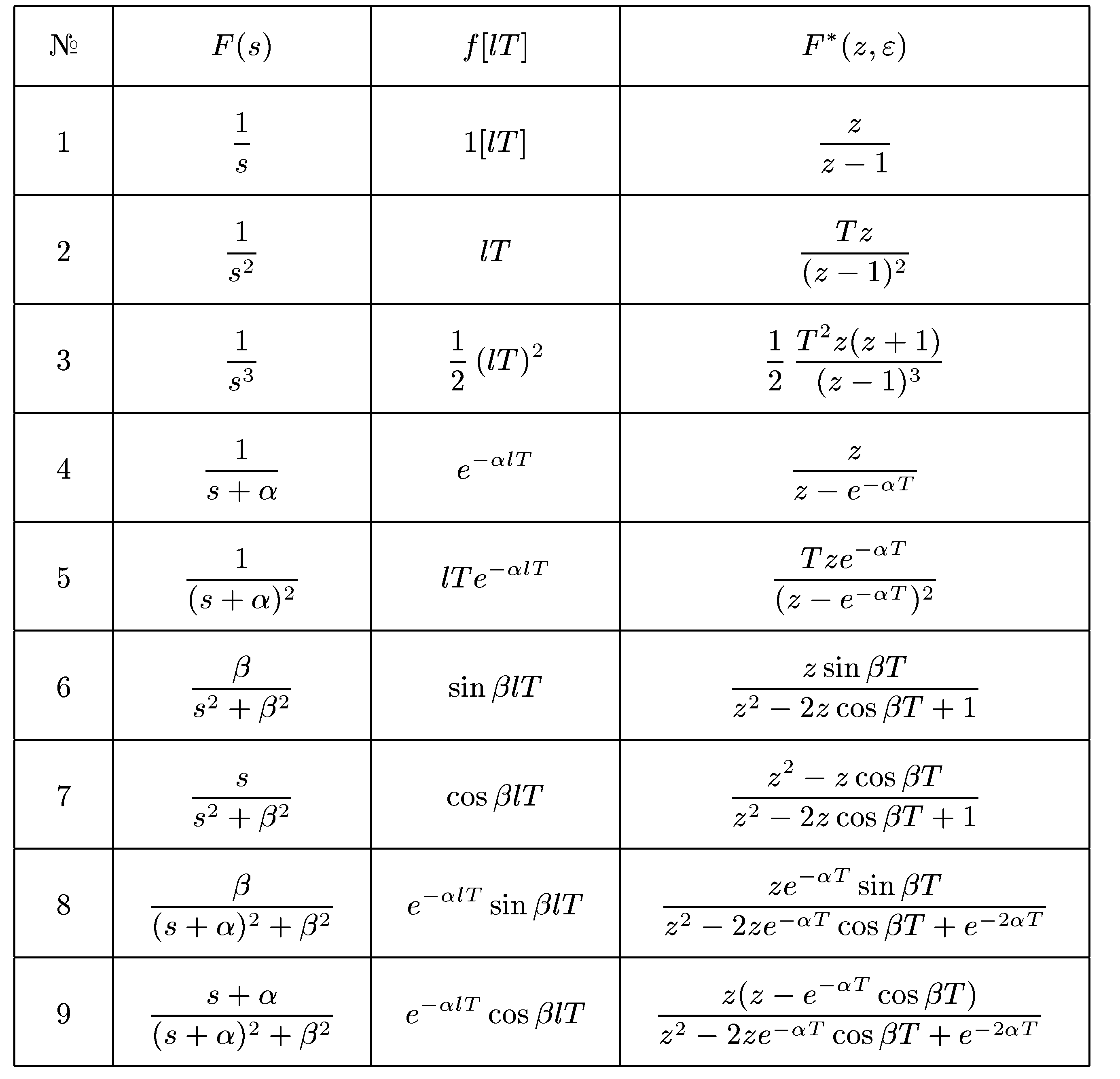
Таблица 12.1.2. Модифицированные z-изображения