

Расчет ошибок с сау при случайных воздействиях
Рассмотрим порядок расчета ошибок в системах управления при случайных воздействиях. Пусть задана система, приведенная на рис.11.3.3
Рис.11.3.3
Необходимо определить величину средней квадратичной ошибки - если заданы Sxx() и Szz().
Рассмотрим несколько случаев.
Пусть действует только полезный сигнал x(t) а помеха z(t) отсутствует.
Спектральная плотность ошибки определяется соотношением:
 (11.3.8)
(11.3.8)
Величина средней квадратичной ошибки - определяется по формуле:
 .
(11.3.9)
.
(11.3.9)
Значения интеграла от спектральной плотности табулированы и могут быть вычислены через коэффициенты полиномов выражения для спектральной плотности.
Пусть действует только помеха z(t) а полезный сигнал x(t) отсутствует.
Действие помехи рассматривается на выходе системы.
Спектральная плотность ошибки при этом определяется соотношением:
 (11.3.10)
(11.3.10)
3. Пусть действует и полезный сигнал x(t) и помеха z(t) и они не коррелированны.
Суммарная спектральная плотность ошибки при этом определяется соотношением:
 (11.3.11)
(11.3.11)
Пример 11.3.2. Для приведенной ниже системы (рис.11.3.4), определить величину средней квадратичной ошибки -, если заданы Sxx() = c2 и Szz() = 0.
Рис. 11.3.4
Если
сигнал и помеха некоррелированны, то
суммарная спектральная плотность
ошибки при этом определяется
соотношением: .
.
Значения интеграла от спектральной плотности вычислим через коэффициенты полиномов выражения для спектральной плотности.
Величина средней квадратичной ошибки - определяется по формуле:
 .
.
Пример
11.3.3. Для системы приведенной на рис.3
определить спектральную плотность
ошибки, вызванную действием помехи
-z(t) со спектральной плотностью

Р
y
ис. 11.3.5
Решение:
Спектральная плотность ошибки
определяется из соотношений:
Вычисление и минимизация дисперсии сигнала ошибки замкнутой системы
Обобщенная алгоритмическая схема которой показана на рис. 11.3.5, а.
Будем считать, что передаточная функция W (р), равная произведению передаточных функций объекта и управляющего устройства, известна. Не заданы могут быть лишь некоторые параметры управляющего устройства.
На
систему действуют случайные возмущения
хп
и
хв
с известными спектральными плотностями
![]() и
и
![]() .
Задающее воздействие
.
Задающее воздействие
![]() также является случайным сигналом со
спектральной плотностью
также является случайным сигналом со
спектральной плотностью
![]() .Пусть
все три воздействия — центрированные
сигналы. Тогда и сигнал ошибки
.Пусть
все три воздействия — центрированные
сигналы. Тогда и сигнал ошибки
![]() будет центрированным.
будет центрированным.
Если указанные внешние воздействия не коррелированы между собой, то сигнал ошибки , возникающий в системе, может рассматриваться как сумма трех независимых составляющих (рис. 11.3.5, б):
![]() (11.3.12)
(11.3.12)
Составляющая
![]() обусловлена неточным воспроизведением
задающего воздействия, а составляющие
и
— неполным подавлением возмущений хп
и хв.
обусловлена неточным воспроизведением
задающего воздействия, а составляющие
и
— неполным подавлением возмущений хп
и хв.
Соответственно и дисперсия сигнала ошибки может быть представлена в виде суммы трех дисперсий:
![]() (11.3.13)
(11.3.13)
Каждая из этих дисперсий может быть вычислена по формуле (11.2.17) независимо друг от друга:
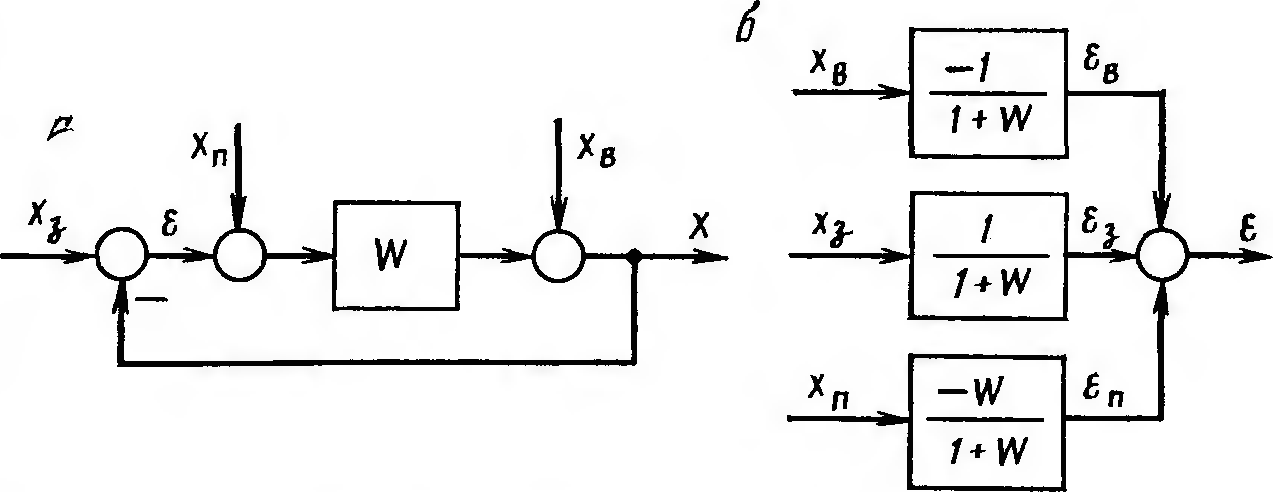 Рис.
11.3.5
Рис.
11.3.5
 (11.3.14)
(11.3.14)
 (11.3.15)
(11.3.15)
 (11.3.16)
(11.3.16)
Если
внешние воздействия коррелированы
между собой, то и составляющие (11.3.12)
сигнала ошибки будут коррелированы,
поэтому полную дисперсию
![]() можно вычислить только путем интегрирования
общей спектральной плотности
можно вычислить только путем интегрирования
общей спектральной плотности
![]() ,
найденной с учетом свойства (11.1.30).
,
найденной с учетом свойства (11.1.30).
При
подстановке в формулы (11.2.28) — (11.2.30)
конкретных функций
![]() и
и
![]() получаются
довольно сложные выражения, интегрирование
которых обычными методами затруднительно.
Поэтому используют методику для
вычисления квадратичных интегральных
оценок. В соответствии с этой методикой
каждую из трех дисперсий определяют
по формуле:
получаются
довольно сложные выражения, интегрирование
которых обычными методами затруднительно.
Поэтому используют методику для
вычисления квадратичных интегральных
оценок. В соответствии с этой методикой
каждую из трех дисперсий определяют
по формуле:
 (11.3.17)
(11.3.17)
где
полиномы
![]() ,
,
![]() и определители
и определители
![]() и
и
![]() составляются по формулам
составляются по формулам и
и
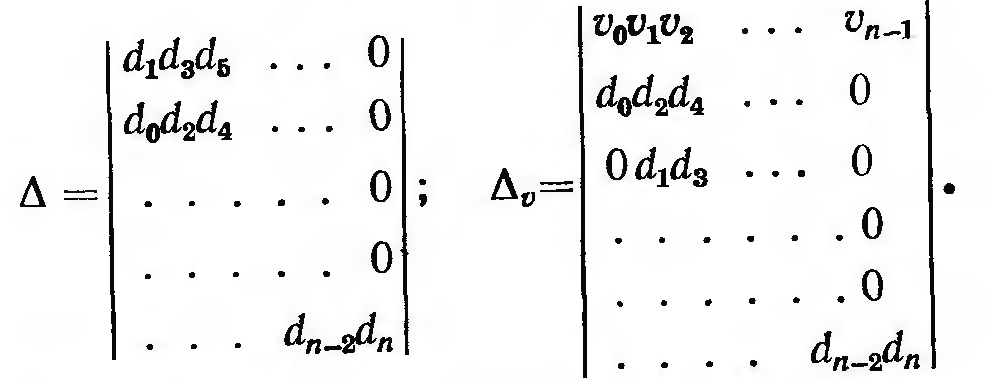 .
.
В
простейших случаях, когда наибольшая
степень полинома
![]() ,
формула (11.3.17)
будет иметь вид:
,
формула (11.3.17)
будет иметь вид:
 (11.3.18)
(11.3.18)
В
полином
![]() в виде сомножителя входит характеристическая
функция
в виде сомножителя входит характеристическая
функция
![]() замкнутой
системы. Поэтому при приближении системы
к границе устойчивости [при
замкнутой
системы. Поэтому при приближении системы
к границе устойчивости [при
![]() ]
интеграл (11.3.17)
резко возрастает.
]
интеграл (11.3.17)
резко возрастает.
Для
систем с запаздыванием подынтегральное
выражение нельзя привести к виду
(11.3.17)
и дисперсию можно вычислить только
приближенно, заменяя запаздывание
![]() дробно-рациональной
функцией.
дробно-рациональной
функцией.
С
помощью формул (11.3.13)
— (11.3.18)
можно получить аналитическое выражение,
связывающее полную дисперсию сигнала
ошибки
![]() с параметрами внешних воздействий и с
параметрами системы (например,
с параметрами внешних воздействий и с
параметрами системы (например,
![]() ):
):
![]() .
(11.3.19)
.
(11.3.19)
Минимизируя
функцию (11.3.19)
по параметрам
![]() и
можно
определить их оптимальные значения.
и
можно
определить их оптимальные значения.
Покажем,
что минимум функции (11.3.19),
как правило, существует. Пусть на систему
действуют задающее воздействие
![]() и помеха хп.
Как правило, спектр задающего воздействия
находится в области низких частот (рис.
11.3.6,
а),
а спектр помехи равномерен
и помеха хп.
Как правило, спектр задающего воздействия
находится в области низких частот (рис.
11.3.6,
а),
а спектр помехи равномерен
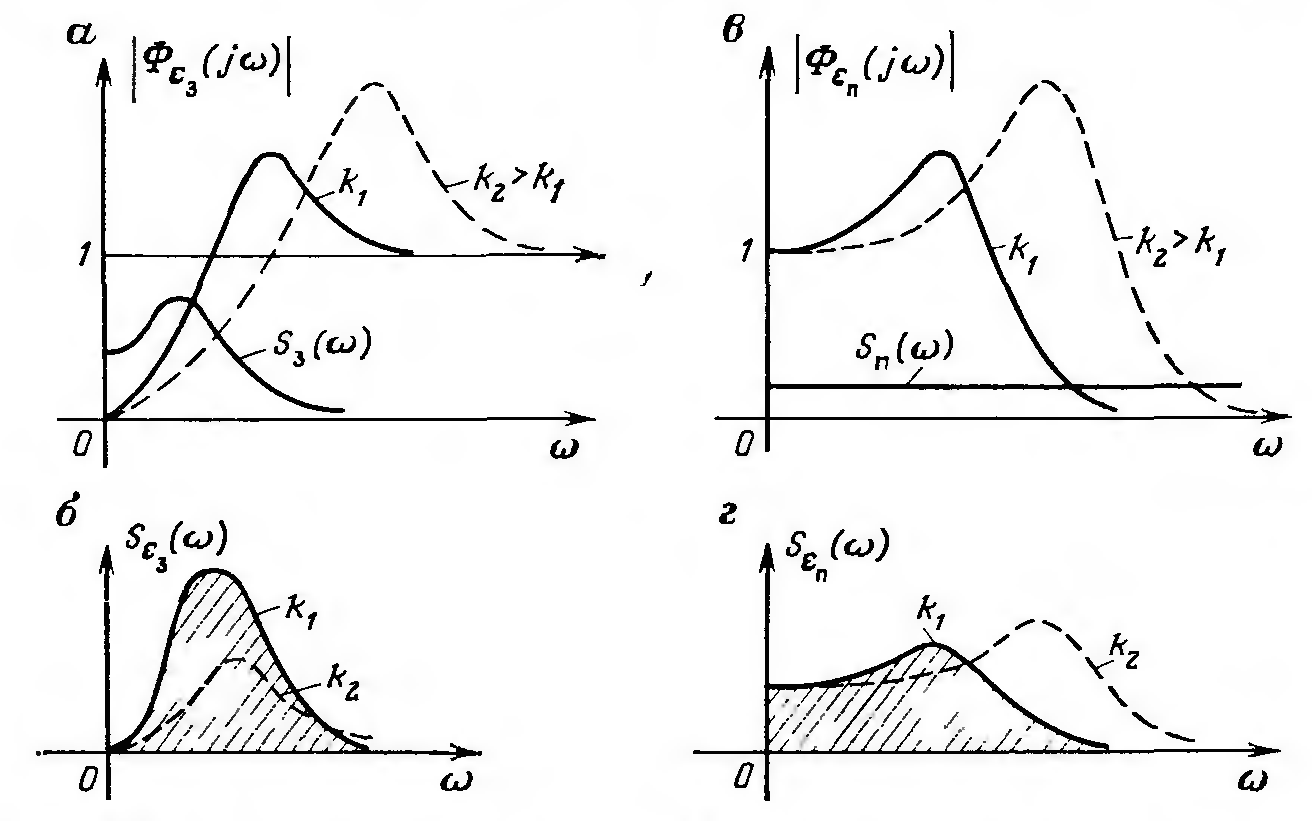
Рис 11.3.6 Влияние передаточного коэффициента разомкнутого контура на спектральную плотность сигнала ошибки
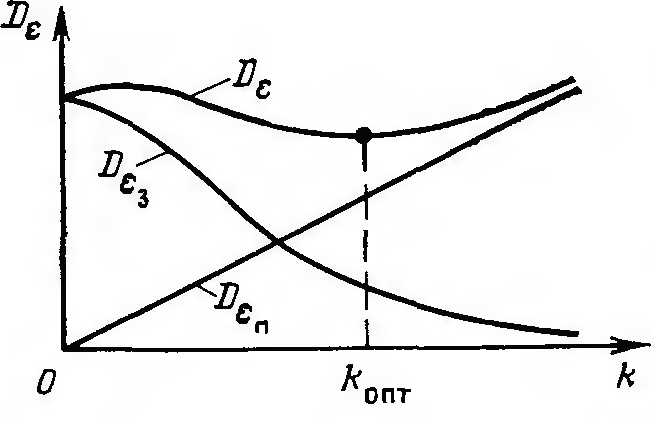
Рис. 11.3.7. График зависимости дисперсии сигнала ошибки от передаточного коэффициента разомкнутого контура
в
широкой полосе частот (рис. 11.3.6,
в).
С увеличением передаточного коэффициента
k
разомкнутого контура а. ч. х.
![]() и
и
![]() по
каналам
по
каналам
![]() и
смещаются
в область более высоких частот, а
резонансный пик становится выше (см.
рис. 11.3.6,
а, в,
пунктирные кривые).
и
смещаются
в область более высоких частот, а
резонансный пик становится выше (см.
рис. 11.3.6,
а, в,
пунктирные кривые).
Так
как спектральные плотности равны
произведениям
![]() и
на соответствующие а. ч. х. замкнутой
системы, то при увеличении k
ординаты функции
и
на соответствующие а. ч. х. замкнутой
системы, то при увеличении k
ординаты функции
![]() уменьшаются (рис. 11.3.6,
б), а ординаты функции
уменьшаются (рис. 11.3.6,
б), а ординаты функции
![]() увеличиваются (рис. 11.3.6,
г).
Соответственно меняются и составляющие
полной дисперсии:
увеличиваются (рис. 11.3.6,
г).
Соответственно меняются и составляющие
полной дисперсии:
![]() уменьшается при увеличении k,
a
уменьшается при увеличении k,
a
![]() —
увеличивается (рис. 11.3.7).
Очевидно, что суммарная дисперсия
—
увеличивается (рис. 11.3.7).
Очевидно, что суммарная дисперсия
![]() при
некотором значении
k = koпm
будет иметь минимум.
при
некотором значении
k = koпm
будет иметь минимум.