

Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления
.pdf¨á. 1.9. ¬¯«¨â㤮-ç áâ®â ï å à ªâ¥à¨á⨪ ª®«¥¡ - ⥫쮣® ª®âãà
¥ªáâ ¯à®£à ¬¬ë ï§ëª¥ MATLAB ¤«ï à áç¥â ª®«¥¡ ⥫쮣® ª®âãà
L=4.0v |
R=800v |
C=10e-6v |
|
|
{ § ¤ ¨¥ § 票© ¯ à ¬¥â஢\ |
|
|||
T=sqrt(L*C), |
xi=R/2*sqrt(C/L), K=L*C |
|
||
{ ¢ëç¨á«¥¨¥ T K |
|
|
||
ommax=600v |
omega=0:ommax/100:ommaxv |
|
||
{ § ¤ ¨¥ § 票© ç áâ®âë !\ |
|
|||
s=j*omegav |
% { ®¯à¥¤¥«¥¨¥ à£ã¬¥â s = |! |
\ |
||
W=K*s. |
2 ./(T 2*s. 2+ 2*xi* T*s+ 1)v |
|
||
{ ¯®¤áâ ®¢ª |
s ¢ W(s)\ |
|
||
A=abs( W)vb |
b |
b |
|
|
{ ¢ëç¨á«¥¨¥ \ |
|
|
||
plot(omega, A, 'w'), grid |
|
|||
{ ¢ë¢®¤ |
£à 䨪. à ¬¥âà 'w' § ¤ ¥â 梥⠫¨¨¨ |
|||
£à 䨪¥ (á¬. [72, 81, 139])
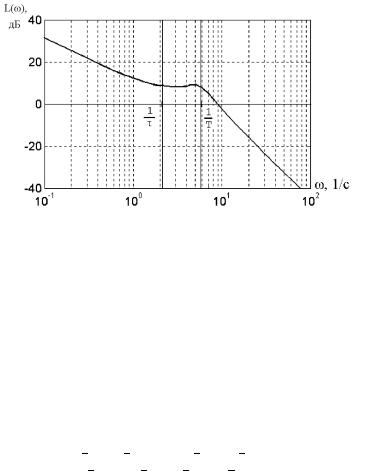
ਬ¥à 2. ¥â ⥫ìë© ¯¯ à â. ®«ã稬 ⥯¥àì ¤¨ - £à ¬¬ã ®¤¥ («®£ à¨ä¬¨ç¥áª¨¥ ç áâ®âë¥ å à ªâ¥à¨á⨪¨) à áᬮâ८£® ¢ëè¥ ¢ ¯à¨¬¥à¥ 2 á. 28 «¥â ⥫쮣® ¯- ¯ à â (1.16). ¨¥ ਧ®¢ ï ¬®¤¥«ì ¯à®¤®«ì®£® 㣫®- ¢®£® ¤¢¨¦¥¨ï ¯à¨ïâ ¢ ¢¨¤¥ (1.33), ᮮ⢥âáâ¢ãî- 騥 ¯¥à¥¤ â®çë¥ äãªæ¨¨ ¨¬¥îâ ¢¨¤ (1.36). áᬮâਬ
52
«¥£ª¨© á® á«¥¤ãî騬¨ § 票ﬨ ¯ à ¬¥â஢ ¥-
ª®â®à®¬ ०¨¬¥ ¯®«¥â [4]: ay = |
2:10 [c;1] |
ay = 0:16[c;1] |
|||||
amz = 29:4 [c;2 ] |
am!zz = 2:18 [c;1] |
;am¢z |
= 60:7 [c;2]: 믮«ïï |
||||
¢лз¨б«¥¨п, ¯®«гз¨¬ б«¥¤гойго ¯¥а¥¤ в®зго дгªж¨о ¯® |
|||||||
㣫ã â £ ¦ : |
|
|
|
|
|
|
|
¢ |
|
(60:7s + 127) |
|
|
k#( s + 1) |
|
|
W# (s) = |
;2 |
+ 4:28s + 34:0) |
= |
|
;2 2 |
|
|
|
s(s |
|
s(T s + 2 T s + 1) |
|
|||
£¤¥ ª®íää¨æ¨¥â ¯¥à¥¤ ç¨ k# = 3:75 [c;1] ¯®áâ®ïë¥ ¢à¥¬¥¨= 0:48 [c] T = 0:17 [c] ª®íää¨æ¨¥â ¤¥¬¯ä¨à®¢ ¨ï = 0:37 : ¨ £à ¬¬ ®¤¥ ( ) «¥â ⥫쮣® ¯¯ à â ¯® 㣫ã â £ ¦ ¯à¥¤áâ ¢«¥ à¨á. 1.10
¨á. 1.10. ¨ £à ¬¬ ®¤¥ «¥â ⥫쮣® |
¯¯ à â . |
|||||||||||||||||||
¥ªáâ ¯à®£à ¬¬ë ï§ëª¥ MATLAB ¤«ï à áç¥â |
ç áâ®âëå |
|||||||||||||||||||
å à ªâ¥à¨á⨪ «¥â ⥫쮣® |
¯¯ à â |
|
|
|||||||||||||||||
a |
|
alpha |
|
|
y= -2.10v |
a |
|
|
delta |
|
y= 0.16v |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
a |
|
alpha |
|
|
m= 29.4v |
a |
|
omega |
|
m = 2.18v |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||||||||
a |
|
delta |
|
m= 60.7v |
|
|
|
|
|
|
|
|
|
|
|
|
|
ãà ¢¥- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
{ § ¤ ¨¥ § 票© ¯ à ¬¥â஢ a a a |
a!z a ¢ |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y y |
mz |
|
mz |
mz |
|
¨© (1.33)\
num=- a delta m*[1, - a alpha y]
den=[1, a omega m, -a alpha y, ...
53

a alpha m, -a alpha y*a omega m, 0]
{ ä®à¬¨à®¢ ¨¥ ¬ áᨢ®¢ ª®íää¨æ¨¥â®¢ ç¨á«¨â¥«ï ¨ § - ¬¥ â¥«ï ¯¥à¥¤ â®ç®© äãªæ¨¨ W ¢ (s) ¨§ (1.34)\
#
k=-n1(2)/d1(3), tau=n1(1)/n1(2) T=sqrt(1/d1(3)), ksi=d1(2)/d1(3)/2/T
{ ¢ëç¨á«¥¨¥ ¯ à ¬¥â஢ k# T ¯¥à¥¤ â®ç®© äãªæ¨¨ W#om=logspace(¢ (s)\ -1, 2)v
{ § ¤ ¨¥ § 票© ç áâ®âë !\
[mag, phase]=bode(num, den, om)v
{ ¢ëç¨á«¥¨¥ ç áâ®âëå å à ªâ¥à¨á⨪ á ¯®¬®éìî ¯à®æ¥- ¤ãàë bode (á¬. ਫ®¦¥¨¥)
lmag=20*log10(mag)v
{ ¯¥à¥¢®¤ § 票© ¢ ¤¥æ¨¡¥«ë\
semilogx(om, lmag, 'w', 1/tau, 0, '+w', 1/T, 0, '+w'), grid
{ ¢ë¢®¤ ¤¨ £à ¬¬ë ®¤¥ ( ) £à 䨪. ¨¬¢®«ë '+' ¢ë¢®¤ïâáï ®á¨ ! ¤«ï 㪠§ ¨ï ᮯàï£ îé¨å ç áâ®â [15, 76].
«ï ç¨á«¥®£® 宦¤¥¨ï ¯¥à¥¤ â®çëå äãªæ¨© ¨ ç - áâ®âëå å à ªâ¥à¨á⨪ ¥¯®á।á⢥® ¯® ãà ¢¥¨ï¬ á®-
áâ®ï¨ï á¨áâ¥¬ë ¬®¦® ¨á¯®«ì§®¢ âì MATLAB-¯à®£à ¬¬ã:
A=[a |
|
|
alpha |
|
|
|
y, 0 , -a |
|
alpha |
|
yv... |
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
a |
|
|
|
alpha |
|
m, -a |
|
omega |
|
m, -a |
|
alpha |
|
mv... |
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
0 |
1 |
|
|
|
0 ]v |
|||||||||||||||||||||||
B=[a |
|
|
delta |
|
yv -a |
|
delta |
|
mv 0]v C=[0 0 1]v D=0v |
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||
{ä®à¬¨à®¢ ¨¥ ¬ âà¨æ ãà ¢¥¨© á®áâ®ï¨ï (1.33)
[n, d]=ss2tf(A, B, C, D, 1)v
{¢ëç¨á«¥¨¥ ¬ áᨢ®¢ ª®íää¨æ¨¥â®¢ ¬ âà¨ç®© ¯¥à¥¤ - â®ç®© äãªæ¨¨ \
[mag, phase]=bode(A, B, C, D, 1, om)v
{¢ëç¨á«¥¨¥ ç áâ®âëå å à ªâ¥à¨á⨪.
¬¥â¨¬, ç⮠१ã«ìâ âë ¢ëç¨á«¥¨© ¡ã¤ã⠥᪮«ìª® ®â- «¨ç âìáï ¨§-§ ¢«¨ï¨ï ¯ à ¬¥âà ay¢ å à ªâ¥à¨§ãî饣® ¯®¤ê¥¬ãî ᨫã àã«¥© ¢ëá®âë. â®â ¯ à ¬¥âà ¥ ãç¨âë-
¢ ¥âáï ¢ (1.34) ¤«ï ª®¬¯ ªâ®á⨠¢ëà ¦¥¨©, ® ¢ª«îç¥ ¢ ¬ âà¨æã B ¢ ¯à®£à ¬¬¥.
54
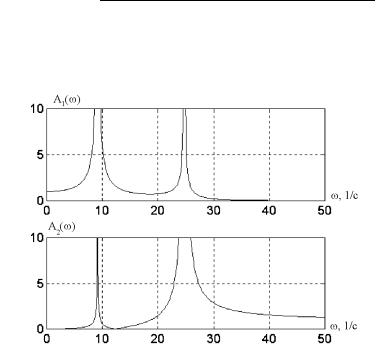
ਬ¥à 3. ¬®à⨧¨à®¢ ï âà ᯮàâ ï á¨áâ¥-
¬ ©¤¥¬ ç áâ®âë¥ å à ªâ¥à¨á⨪¨ âà ᯮà⮩ á¨áâ¥- ¬ë (1.19), á. 32. ® ¯¥à¥¤ â®çë¬ äãªæ¨ï¬ W1(s) W2(s)
¯®«ãç¥ë¬ ¢ ¯. 1.5.3. (¯à¨¬¥à 4, á. 38), ¯®«ãç ¥¬ á«¥¤ãî- 騥 ¢ëà ¦¥¨ï ¤«ï :
|
|
|
|
k1k2 |
|
|
|
A1(!) = jm1m2!4 |
; (k1m1 + k1m2 + k2m1)!2 + k1k2j |
|
|||||
A2(!) = |
jm1m2! |
4 |
m1!2jk1 ; m2!2j |
2 |
+ k1k2j |
: |
|
|
|
; (k1m1 + k1m2 + k2m1)! |
|
|
|||
ª ç¥á⢥ ¯à¨¬¥à |
|
|
à¨á. 1.11 ¯®ª § ë , à ááç¨â - |
||||
ë¥ ¯à¨ á«¥¤ãîé¨å § 票ïå ¯ à ¬¥â஢ [126]: m1 = 500 [ª£], m2 = 400 [ª£], k1 = 60[ª /¬], k2 = 170[ª /¬].
¨á. 1.11. âà ᯮà⮩ á¨á⥬ë.
¥ªáâ MATLAB-¯à®£à ¬¬ë ¤«ï à áç¥â ç áâ®âëå å à ªâ¥à¨á⨪ âà ᯮà⮩ á¨á⥬ë
k |
|
1= 60e3 v |
k |
|
|
2= 170e3 v |
|||
|
|
|
|||||||
m |
|
1= 500 v |
m |
|
2= 400 v |
||||
|
|
||||||||
{ ¢¢®¤ ¯ à ¬¥â஢ á¨á⥬ë\ |
|||||||||
ommax= 50 v |
|
|
omega=0:ommax/500:ommaxv |
||||||
|
|
|
|
|
55 |
||||
{ § ¤ ¨¥ § 票© ç áâ®âë |
|
!\ |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
A |
|
|
|
1=k |
|
|
|
1*k |
|
|
2./abs(m |
|
1*m |
|
2*omega. 4-... |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
(k |
|
|
1*m |
|
|
1+ k |
|
1*m |
|
2+k |
|
2*m |
|
|
|
1).*omega. 2+ k |
|
1*k |
|
2 )v |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
A |
|
2=m |
|
1*omega. 2 .*abs(k |
|
1- m |
|
2.*omegab |
. 2)./... |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
abs(m |
|
1*m |
|
2*omega. 4-... |
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
(k |
|
1*m |
|
1+ k |
|
1*mb |
2+k 2*m 1).*omega. 2+ bk 1*k 2)v |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
{ ¢ëç¨á«¥¨¥ A1 (!b) A2 |
(!)\ |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
subplot(211), plot(omega, A |
|
1, 'w'), gridb |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
axis([0 ommax 0 10]) |
|
|
|
|
|
|
2, 'w'), grid |
|
|
|
|
|
||||||||||||||||||||||||||||
subplot(212), plot(omega, A |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
axis([0 ommax 0 10]) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
{ ¢ë¢®¤ £à 䨪®¢ . à ¬¥âà axis § ¤ ¥â ¤¨ ¯ §®ë |
||||||||||||||||||||||||||||||||||||||||
ª®®à¤¨ âëå ®á¥©. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
¤ ®© ¯à®£à ¬¬¥ ¢ëç¨á«¥¨ï ¢ë¯®«¥ë ¯® ¯à¨¢¥¤¥- |
||||||||||||||||||||||||||||||||||||||||
ë¬ ¢ëè¥ «¨â¨ç¥áª¨¬ ¢ëà ¦¥¨ï¬. «®£¨ç® ¯à¨¬¥àã |
||||||||||||||||||||||||||||||||||||||||
2, ¬®¦® ¥ ¢ë¯®«ïâì «¨â¨ç¥áª¨å ¢ëª« ¤®ª, ¯®«ãç âì |
||||||||||||||||||||||||||||||||||||||||
ç¨á«¥® ¯® ¬ âà¨æ ¬ ãà ¢¥¨© á®áâ®ï¨ï á¨á⥬ë á |
||||||
¯®¬®éìî ¯à®æ¥¤ãàë bode. |
|
|
|
|||
|
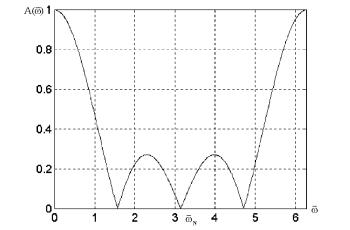
ਬ¥à 4. ¨ä஢®© 䨫ìâà. ¯. 1.5.3. á. 45, ¯®«ãç¥- |
|||||
|
¯¥à¥¤ â®ç ï äãªæ¨ï ¥à¥ªãàᨢ®£® æ¨ä஢®£® 䨫ì- |
|||||
âà |
(1.22), ¨¬¥îé ï ¢¨¤ (1.38) W(z) = |
1 + z + z2 + z3 |
: «ï - |
|||
|
|
|||||
宦¤¥¨ï ç áâ®âëå å à ªâ¥à¨á⨪ 䨫ìâà |
4z4 |
|||||
¢ë¯®«¨¬ ¯®¤- |
||||||
áâ ®¢ªã z = e|!: ®«ã稬 W(e|! ) = |
1 + e|! + e2|! + e3|! |
: |
||||
|
||||||
|
|
|
|
4e4|! |
||
à áᬠâਢ ¥¬®¬ á«ãç ¥ ¢¢¨¤ã ᨬ¬¥âਨ ¢ëà ¦¥¨ï ¤«ï |
||||||
W(z) ¯à¨ à áç¥â¥ ç áâ®âëå å à ªâ¥à¨á⨪ 㤮¡® ¢ë¯®«- ¨âì ¯à¥®¡à §®¢ ¨ï W(e|! ) = 0:25 e;4|! +e;3|! +e;2|! +e;|! =
0:25 |
|
e;2:5|! e;1:5|! +e;0:5|! +e0:5|! +e1:5|! |
|
= 0:5 |
|
e;2:5|! |
|
cos 1:5! + |
||||||
|
|
|
= e |
;2:5|! |
|
; |
|
|
|
|
|
|
||
cos 0:5! |
|
cos! cos 0:5!: âáî¤ |
䨫ìâà |
A(!) |
|
|||||||||
|
|! |
|
; |
|
|
|
|
|
|
|
; |
|
||
j1W(.12e. |
|
j |
= jcos(!) cos(0:5!)j: à 䨪 A(!) ¯à¥¤áâ ¢«¥ à¨á. |
|||||||||||
|
|
¥ªáâ MATLAB-¯à®£à ¬¬ë ¤«ï à áç¥â ç áâ®âëå |
|
|||||||||||
|
|
|
|
|
å à ªâ¥à¨á⨪ æ¨ä஢®£® 䨫ìâà |
|
|
|
||||||
omega=0:0.005:2*piv |
z=exp(i*omega)v |
|
|
|
|
|||||||||
{ ®¯à¥¤¥«¥¨¥ § 票© |
à£ã¬¥â |
z = e|! |
¯¥à¥¤ â®ç®© |
|||||||||||
äãªæ¨¨ ¤«ï ¢ëç¨á«¥¨ï ç áâ®âëå å à ªâ¥à¨á⨪ ¤¨áªà¥â-
®© á¨á⥬ë\ |
|
|
W= (1+ z+ z. 2+ z. 3)./z. 4/4v |
||
b |
b |
b |
{ ¢ëç¨á«¥¨¥ W(e|!)\ |
|
|
|
|
56 |
A=abs(W)v
plot(omega, A, 'w'), grid, axis([0, 2*pi, 0, 1])
{ ¢ëç¨á«¥¨¥ ¨ ¢ë¢®¤ £à 䨪 .
¨á. 1.12. |
æ¨ä஢®£® 䨫ìâà |
¬ ¥ ç ¨ ¥ . |
à áᬮâà¥ëå ¢ëè¥ ¯à¨¬¥à å ç - |
áâ®âë¥ å à ªâ¥à¨á⨪¨ ®¯à¥¤¥«ï«¨áì ¯®á«¥ ¯à¥¤áâ ¢«¥¨ï ¯¥à¥¤ â®çëå äãªæ¨© ¯® ᮮ⢥âáâ¢ãî騬 ¢å®¤ ¬ ¨ ¢ëå®-
¤ ¬ ¢ ¢¨¤¥ ®â®è¥¨ï ¬®£®ç«¥®¢. ¢ëç¨á«¨â¥«ì®¬ ®â- ®è¥¨¨ ®ª §ë¢ ¥âáï ¯à¥¤¯®çâ¨â¥«ìë¬ ¯®«ì§®¢ âìáï ¥¯®- á।á⢥® ¯®¤áâ ®¢ª®© = |! («¨¡® = e|! { ¤«ï ¤¨áªà¥â-
ëå á¨á⥬) ¢ ¢ëà ¦¥¨¥ ¤«ï १®«ì¢¥âë R( ) = |
|
In ;A ;1: |
||||||||||||||||
в¥¬ ¨б¯®«м§говбп б®®в®и¥¨п R( + |) = |
|
( |
+ |)In |
|||||||||||||||
|
;1 |
|
; |
|
|
|
|
; |
|
|
|
|
|
;1 |
|
|
; |
; |
A |
|
= |
|
A |
|
|In |
( In |
|
A)2 |
+ 2In |
|
= U + |V £¤¥ |
||||||
|
In |
; |
; |
|
; |
|
|
|||||||||||
|
|
|
|
|
|
= |! |
|
|
|
|
; |
|
|
|
||||
= Re = Im |
(¯à¨ |
¯®¤бв ¢«повбп § з¥¨п = 0 |
||||||||||||||||
= ! |
¯à¨ = e|! § 票ï = cos! = sin!). १ã«ì- |
|||||||||||||||||
â ⥠ç¨á«¥® 室ïâáï ¬ âà¨çë¥ § ç¥¨ï ¢¥é¥á⢥®© ¨ ¬¨¬®© ç áâ®âëå å à ªâ¥à¨á⨪ U V: ¬®¦ ï ¨å ¬ âà¨æë ¯®«ãç ¥¬ ¢¥é¥á⢥ãî ¨ ¬¨¬ãî ç áâ®âë¥
å à ªâ¥à¨á⨪¨ ¯® § ¤ ®¬ã ¢å®¤ã ¨ ¢ë室ã. ª®© ᯮ- ᮡ ¯®§¢®«ï¥â ¨§¡¥¦ âì ¢ëç¨á«¥¨ï ¯¥à¥¤ â®çëå äãªæ¨© ®â ¯ à ¬¥âà ¨, ªà®¬¥ ⮣®, ¨á¯®«ì§®¢ âì íää¥ªâ¨¢ë¥ ¢ë- ç¨á«¨â¥«ìë¥ «£®à¨â¬ë ¬ âà¨ç®© «£¥¡àë.
57
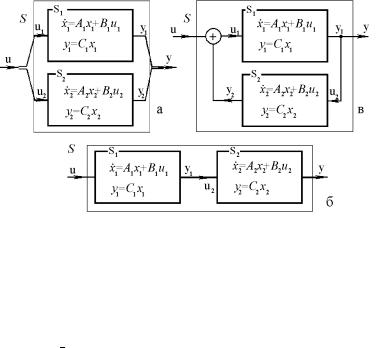
1.7. à ¢¥¨ï á®áâ®ï¨ï ¯à¨ ᮥ¤¨¥¨¨ á¨á⥬
® ¬®£¨å á«ãç ïå ¢®§¨ª ¥â ¥®¡å®¤¨¬®áâì ¯®«ãç¨âì ¥¤¨- ë¥ ãà ¢¥¨ï ¤«ï á¨á⥬ë, á®áâ®ï饩 ¨§ ¥áª®«ìª¨å ᮥ¤¨-
¥ëå ¬¥¦¤ã ᮡ®© ¯®¤á¨á⥬. ª¨¥ á¨áâ¥¬ë ¨®£¤ §ë- ¢ îâáï "ª®¬¯®§¨â묨". áᬮâਬ, ª ª ¢ë£«ï¤¨â à¥è¥- ¨¥ í⮩ § ¤ ç¨ ¯à¨ ®¯¨á ¨¨ ¬®¤¥«¥© á¨á⥬ ãà ¢¥¨ï¬¨ á®áâ®ï¨ï [47].
1.7.1. ¥§ ¢¨á¨¬ë¥ ¯®¤á¨á⥬ë
áᬮâਬ ¢ ç «¥ ¨¡®«¥¥ ¯à®á⮩ á«ãç ©, ª®£¤ ª®¬¯®- §¨â ï á¨á⥬ á®á⮨⠨§ ¤¢ãå ¥§ ¢¨á¨¬ëå ¯®¤á¨á⥬ (à¨á. 1.13, ). 室®¬ á¨á⥬ë ï¥âáï ¢¥ªâ®à, ¯®«ãç¥ë© ®¡ê-
¥¤¨¥¨¥¬ ¢å®¤®¢ ª ¦¤®© ¯®¤á¨á⥬ë, ¢ë室®¬ { ®¡ê¥¤¨- ¥¨¥ ¨å ¢ë室®¢.
¨á. 1.13. âàãªâãàë ª®¬¯®§¨âëå á¨á⥬.
ãáâì á¨á⥬ë Si i = 1 2 ®¯¨áë¢ îâáï ãà ¢¥¨ï¬¨ á®- áâ®ï¨ï
xi(t) = Ai(t)xi (t) + Bi(t)ui(t) yi(t) = Ci (t)xi(t)
¢ ª®â®àëå ¬ âà¨æë Ai(t) Bi(t) Ci(t) ¨¬¥îâ à §¬¥àë, ᮮ⢥â- á⢥®, ni ni ni mi li mi : ¢¥¤¥¬ ᮢ®ªã¯ë¥ (®¡é¨¥) ¢¥ª-
|
|
x1 |
(t) x2(t) |
2Rn1+n2 ¢å®¤ |
|
â®àë: á®áâ®ï¨ï x(t) = col |
u(t) = |
||||
|
|
|
|
|
|
|
|
|
58 |
|
|

col |
u1 |
(t) u2 |
(t) |
|
|
m1 |
+m2 |
¨ ¢ë室 |
|
y1(t) y2 |
(t) |
|
|||
R |
l1 |
+l2 |
: |
|
|
2 R |
|
|
|
|
ã¡¥¦¤ ¥¬áï, |
2 |
|||
|
|
|
¡ê¥¤¨¨¢ |
ãà ¢¥¨ï á¨áâ¥¬ë ¢ ®¤®, |
|
||||||||||
çâ® ®â®á¨â¥«ì® ¢¢¥¤¥ëå ¯¥à¥¬¥ëå íâ® ãà ¢¥¨¥ ¨¬¥- ¥â ¢¨¤ (1.3)
x(t) = A(t)x(t) + B(t)u(t) y(t) = C(t)x(t)
¢ ª®â®à®¬ ¬ âà¨æë A(t) B(t) C(t) ¨¬¥ов б«¥¤гойго ¡«®з- го бвагªвгаг:
A1(t) |
0n1 n2 |
B(t) = |
B1 (t) |
|
A(t) = 0n2 n1 |
A2(t) |
0n2 m1 |
||
|
|
C1 (t) |
0l1 n2 |
: |
|
C(t) = 0l2 n1 |
C2(t) |
||
1.7.2. ®á«¥¤®¢ ⥫쮥 ᮥ¤¨¥¨¥
0n1 m2
B2 (t)
ãáâì ⥯¥àì ¢å®¤®¬ á¨á⥬ë S ï¥âáï ¢å®¤ ¯®¤á¨á⥬ë S1 |
|||||
u(t) u1(t)\ ¢ë室 á¨áâ¥¬ë ®¡à §ã¥âáï ¢ë室®¬ ¯®¤á¨á⥬ë |
|||||
S2 y(t) |
y2(t) ¨ ¢ë室 ¯¥à¢®© ¯®¤á¨á⥬ë S1 ¯®áâ㯠¥â |
||||
¢å®¤ ¯®¤á¨á⥬ë S2 |
â ª, çâ® ¨å à §¬¥à®á⨠ᮢ¯ ¤ îâ, l1 = |
||||
m2 ¨ u2 |
(t) = y1(t): ¥à¥¯¨è¥¬ ãà ¢¥¨ï ¯®¤á¨á⥬ á ãç¥â®¬ |
||||
㪠§ ®© á¢ï§¨ ¬¥¦¤ã ¨¬¨ (à¨á. 1.13, ¡). ®«ã稬 |
|||||
x1 |
(t) = A1(t)x1 |
(t) + B1 |
(t)u(t) |
y1(t) = C1 (t)x1(t) |
|
x2 |
(t) = A2(t)x2 |
(t) + B2 |
(t)C1(t)x1 (t) y(t) = C2 (t)x2(t) |
||
®âªã¤ |
¯®«ãç ¥¬ ¬ âà¨æë ãà ¢¥¨© ¢ ä®à¬¥ (1.3) ¢¨¤ |
||||
|
|
A1(t) |
0n1 n2 |
B1(t) |
|
|
|
A(t) = B2(t)C1 (t) A2(t) |
B(t) = 0n1 m2 |
||
|
|
|
C(t) = [ 0l2 n1 |
C2(t) ] : |
|
1.7.3. |
®¥¤¨¥¨¥ á ®¡à ⮩ á¢ï§ìî |
||||
ãáâì ⥯¥àì ¯®¤á¨á⥬ë ᮥ¤¨¥ë á ®¡à ⮩ á¢ï§ìî, â.¥.
¢ë室 ¯®¤á¨á⥬ë S2 |
á㬬¨àã¥âáï (¨«¨ ¢ëç¨â ¥âáï) á® ¢å®- |
|
¤®¬ ¢á¥© á¨á⥬ë S |
¨ ¯®áâ㯠¥â ¢å®¤ ¯®¤á¨á⥬ë S1: |
|
ª ç¥á⢥ ¢ë室 |
á¨á⥬ë S ¨á¯®«ì§ã¥¬ ¢ë室 ¯®¤á¨á⥬ë S2 |
|
(à¨á. 1.13, ¢). |
ª¨¬ ®¡à §®¬, ¬ë áç¨â ¥¬, çâ® m1 = l2 |
|
m2 = l1 m = m1 l = l2 n = n1 + n2 u1(t) = u(t) y2 (t)
59

u2(t) = y1(t): ãç¥â®¬ á¢ï§¨ ¬¥¦¤ã ¯®¤á¨á⥬ ¬¨ ¨å ãà ¢¥- ¨ï ¯à¨¨¬ îâ ¢¨¤
x1(t)=A1(t)x1(t) B1 (t)C2(t)x2 (t)+B1 (t)u(t) y(t)=C1(t)x1 (t) x2(t)=A2(t)x2(t)+B2 (t)C1(t)x1 (t)
¨ ¬ ва¨жл ¢ (1.3) ®¯а¥¤¥«повбп ¢ла ¦¥¨п¬¨
A1 |
(t) |
|
B1 (t)C2 |
(t) |
B1 (t) |
|
A(t) = B2(t)C1(t) |
|
A2(t) |
|
B(t) = 0n1 m2 |
||
|
C(t) = [C1(t) |
0l1 n2 ] : |
|
|||
«®£¨çë¬ ®¡à §®¬ ¬®£ãâ ¡ëâì ¯®«ãç¥ë ãà ¢¥¨ï á®- áâ®ï¨ï ¯à¨ ¯®á«¥¤®¢ ⥫쮬 ᮥ¤¨¥¨¨, â ª¦¥ ¢ ¤à㣨å, ¡®«¥¥ á«®¦ëå á«ãç ïå. ⬥⨬, çâ® å®âï ¨§«®¦¥¨¥ íâ®- £® ¯ à £à ä ª á «®áì ¥¯à¥àë¢ëå á¨á⥬, ¢á¥ ¯®«ãç¥ë¥
¢ëè¥ á®®â®è¥¨ï á¯à ¢¥¤«¨¢ë (¯®á«¥ ®ç¥¢¨¤ëå ¨§¬¥¥¨© ¢ ®¡®§ 票ïå) ¨ ¤«ï ¤¨áªà¥âëå á¨á⥬.
1.8. ८¡à §®¢ ¨¥ ¡ §¨á
ª ®â¬¥ç¥® ¢ ¯. 1.1. á. 15, ¢¥ªâ®à á®áâ®ï¨ï ¬®¦¥â ¡ëâì ¯à¥¤áâ ¢«¥ ¥¥¤¨áâ¢¥ë¬ ®¡à §®¬ { ¯à®¨§¢®«ì®¥ ¢§ ¨¬®- ®¤®§ 箥 ®â®¡à ¦¥¨¥ ¯à®áâà á⢠á®áâ®ï¨© X ¢ á¥- ¡ï ¤ ¥â ®¢ë© ¢¥ªâ®à, ª®â®àë© â ª¦¥ ¬®¦® ¨á¯®«ì§®¢ âì
¢ ª ç¥á⢥ á®áâ®ï¨ï á¨á⥬ë. â®â ¢¥ªâ®à ¨¬¥¥â ¤à㣨¥ § ç¥¨ï ª®¬¯®¥â. ᮡ¥® à á¯à®áâà ¥® «¨¥©®¥ ¥- ¢ë஦¤¥®¥ ¯à¥®¡à §®¢ ¨¥ á ª¢ ¤à ⮩ n n-¬ âà¨æ¥© T det T 6= 0: ਠ⠪®¬ ¯à¥®¡à §®¢ ¨¨ £®¢®àïâ, çâ® ¢¥ªâ®à á®áâ®ï¨ï ¯à¥¤áâ ¢«¥ ¢ ®¢®¬ ¡ §¨á¥, ᮮ⢥âáâ¢ãî饥 ¯à¥®¡à §®¢ ¨¥ ãà ¢¥¨© §ë¢ î⠯८¡à §®¢ ¨¥¬ ¡ §¨á
ãà ¢¥¨© á®áâ®ï¨ï. ¨¤ ãà ¢¥¨© á¨áâ¥¬ë ¯à¨ í⮬ ¨§¬¥- ï¥âáï, ® ®áâ îâáï ¥¨§¬¥ë¬¨ ¢å®¤®-¢ëå®¤ë¥ á®®â®è¥- ¨ï. ç áâ®áâ¨, ¤«ï áâ 樮 àëå «¨¥©ëå á¨á⥬ ®áâ - ¥âáï ¥¨§¬¥®© ¯¥à¥¤ â®ç ï äãªæ¨ï. áᬮâਬ ¯à¥- ®¡à §®¢ ¨¥ ¡ §¨á ¡®«¥¥ ¯®¤à®¡®.
ãáâì T { ¥¢ë஦¤¥ ï ¬ âà¨æ ¯®à浪 n det T 6= 0 x(t)2Rn { ¢¥ªâ®à á®áâ®ï¨ï á¨á⥬ë. ¯à¥¤¥«¨¬ ¢¥ªâ®à
x~(t) = T x(t): ᨫ㠥¢ë஦¤¥®á⨠¬ âà¨æë ¯à¥®¡à §®¢ - ¨ï T ¢¥ªâ®à x~(t) ®¯à¥¤¥«ï¥âáï ¯® x(t) ¢§ ¨¬®-®¤®§ ç® ¨
60
¬®¦® § ¯¨á âì x(t) = T ;1x~(t): 17 ¥à¥¯¨è¥¬ ãà ¢¥¨ï á®- áâ®ï¨ï (1.2) ¢ ¯à¥®¡à §®¢ ®¬ ¢¨¤¥. ç¨âë¢ ï çâ® x(t) = T ;1x~(t) ¯®«ã稬
x~(t) = T A(t)T;1x~(t) + T B(t)u(t) x~(t0) = x~0 = T x0 |
(1.43) |
|||||||||
y(t) = C(t)T;1x~(t) + D(t)u(t) |
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
~ |
|
;1 |
|
~ |
|
~ |
|
¡®§ 稬 ¬ âà¨æë A(t) = T A(t)T |
|
B |
(t) = |
T B(t) C |
(t) = |
|||||
C(t)T ;1: âáî¤ |
¯®«ãç ¥¬ ãà ¢¥¨ï (1.43) ¢ ä®à¬¥ (1.2): |
|||||||||
x~(t) |
= |
~ |
|
~ |
|
x~(t0) = x~0 |
= T x0 |
|
||
A(t)~(x t) + B(t)u(t) |
|
(1.44) |
||||||||
y(t) |
= |
~ |
(t)~(x t) + D(t)u(t): |
|
|
|
|
|
||
C |
|
|
|
|
|
|
||||
à ¢¥¨ï (1.44) ¯à¥¤áâ ¢«ïîâ ᮡ®© ãà ¢¥¨ï á®áâ®ï¨ï
á¨á⥬ë (1.2) ¢ ®¢®¬ ¡ §¨á¥. 祢¨¤®, çâ® à §«¨çëå ä®à¬ ãà ¢¥¨© á®áâ®ï¨ï ¬®¦¥â ¡ëâì § ¯¨á ® ¥®£à ¨ç¥® ¬®£®. 18
áᬮâਬ ⥯¥àì áâ 樮 àë¥ à¥ «¨§ã¥¬ë¥ á¨á⥬ë,
§¤ ë¥ ãà ¢¥¨ï¬¨
x(t) = Ax(t) + Bu(t) |
y(t) = Cx(t) + Du(t): |
(1.45) |
|
१ã«ìâ ⥠¯à¥®¡à §®¢ ¨ï á ¬ âà¨æ¥© T ¯®«ã稬 |
|
||
~ |
~ |
~ |
(1.46) |
x~(t) = Ax~(t) + Bu(t) |
y(t) = Cx~(t) + Du(t) |
||
~ ~ ~ |
®¯à¥¤¥«¥ë ¢ëè¥. ëç¨á«¨¬ ¯¥à¥¤ - |
||
£¤¥ ¬ âà¨æë A B C |
|||
â®çãî äãªæ¨î á¨á⥬ë (1.46) ¯® ä®à¬ã«¥ (1.25) ¨ ¢ë¯®«¨¬
¯à¥®¡à §®¢ ¨ï: 19 |
|
|
|
|
|
|
|
|
|
; |
|
|
; |
|
|
|
|
|
|||||
~ |
|
|
; |
; |
|
|
|
|
|
|
|
;1 |
|
|
|
|
|
|
|
|
|||
|
~ |
|
|
~ ;1 |
~ |
|
|
|
|
;1 |
|
sIn |
|
T AT |
;1 |
|
;1 |
T B + D = |
|||||
W(s) = C sIn |
A B + D = CT |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
= C |
; |
sIn ; A |
|
|
T |
+ D |
W(s): |
|
|
|
|
|||||||
ª¨¬ ®¡à §®¬, ¯¥à¥¤ â®ç ï äãªæ¨ï á¨áâ¥¬ë ¯®á«¥ ¯à¥- |
|||||||||||||||||||||||
®¡à §®¢ ¨ï ¯®¤®¡¨ï |
|
|
á ¬ âà¨æ¥© T ¥ ¨§¬¥¨« áì. ®¢®àïâ, |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
17 «¨â¥à âãॠ¨®£¤ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
¨á¯®«ì§ãî⠯८¡à §®¢ ¨¥ x~(t) = T ;1x(t): ਠ|
||||||||||||||||||||||
â ª®¬ ¯à¥®¡à §®¢ ¨¨ ¢ ¯®á«¥¤ãîé¨å ä®à¬ã« å ¤® ¢¬¥áâ® ¬ âà¨æë T |
|||||||||||||||||||||||
¨á¯®«ì§®¢ âì T ;1 (¨ ®¡®à®â). |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
18 ¤¥áì ¥ à áᬮâ८ ¯à¥®¡à §®¢ ¨¥ á ¯¥à¥¬¥®© ¢® ¢à¥¬¥¨ ¬ - |
|||||||||||||||||||||||
âà¨æ¥© T |
= T (t). âà¨æ |
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
A(t) ¯à¨ â ª®¬ ¯à¥®¡à §®¢ ¨ï ¯à¨¨¬ ¥â ¢¨¤ |
||||||||||||||||||||||
~ |
_ |
(t) + T(t)A(t) T |
;1 |
(t): |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
A(t) = |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
19 ᯮ«ì§®¢; |
ë ⮦¤ |
¥á⢠(AB);1 = B;1A;1 |
det(AB) = det A det B |
||||||||||||||||||||
á¯à ¢¥¤«¨¢ë¥ ¤«ï ª¢ ¤à âëå ¥¢ë஦¤¥ëå ¬ âà¨æ.
61